OpenCV-Python:车道检测
任务:
一共要完成两项任务:
1. 在所提供的公路图片上检测出车道线并标记

2. 在所提供的公路视频上检测出车道线并标记
方案:
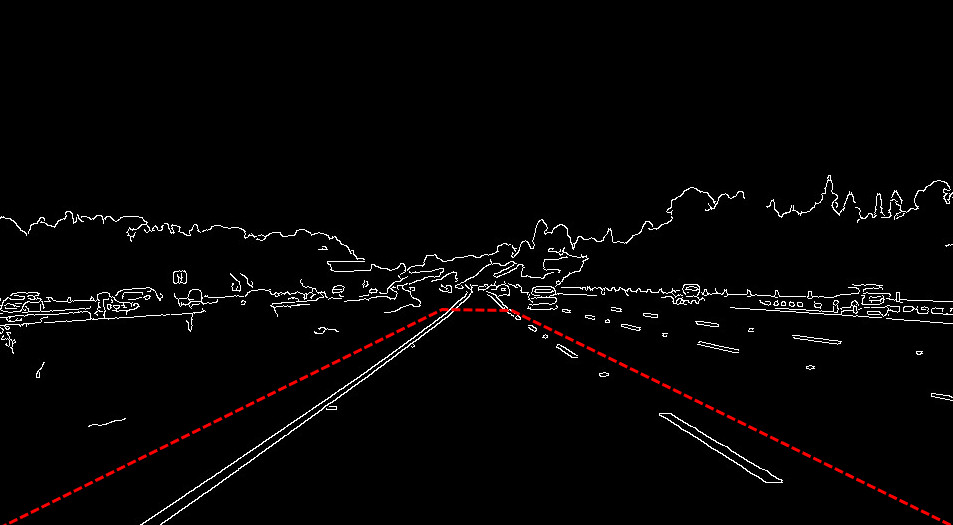
要检测出当前车道,就是要检测出左右两条车道直线。由于无人车一直保持在当前车道,那么无人车上的相机拍摄视频中,车道线的位置应该基本固定在某一个范围内:

如果我们手动把这部分ROI区域抠出来,就会排除大部分干扰。接下来检测直线肯定用霍夫变换,但ROI区域内的边缘直线信息还是很多,考虑到只有左右两条车道,一条斜率为正、一条斜率为负,可将所有的线分为两组,每组再通过均值或最小二乘法拟合的方式确定唯一一条线就可以完成检测。具体步骤如下:
1. 灰度化
2. 高斯模糊
3. Canny边缘检测
4. 不规则ROI区域截取
5. 霍夫直线检测
6. 车道计算
对于视频来说,只要能检测出一幅图,后面将图像合成一下即可。
图像预处理
灰度化和滤波操作是大部分图像处理的必要步骤。灰度化是因为不需要色彩信息,可以减少计算量。而滤波会削弱图像噪点,排除干扰信息。另外,边缘提取是基于图像梯度的,梯度对噪声很敏感,所以平滑操作必不可少。

这里我们用分模块来写,方便调用:
import cv2
import numpy as np
# 高斯滤波核大小
blur_ksize =
# Canny边缘检测高低阈值
canny_lth =
canny_hth =
def process_an_image(img):
# . 灰度化、滤波和Canny
gray = cv2.cvtColor(img, cv2.COLOR_RGB2GRAY)
blur_gray = cv2.GaussianBlur(gray, (blur_ksize, blur_ksize), )
edges = cv2.Canny(blur_gray, canny_lth, canny_hth)
if __name__ == "__main__":
img = cv2.imread('test_pictures/lane.jpg')
result = process_an_image(img)
cv2.imshow("lane", np.hstack((img, result)))
cv2.waitKey()

边缘检测结果图
ROI截取
按前面方案中提到的,只需保留边缘图中红线部分区域用于后续的霍夫直线检测,其余的都是无用的信息:
我们可以穿件一个梯形的掩膜,然后与边缘检测结果图混合运算,掩膜中白色部分保留,黑色部分舍弃。梯形的四个坐标需要手动标记:

def process_an_image(img):
# . 灰度化、滤波和Canny
# . 标记四个坐标点用于ROI截取
rows, cols = edges.shape
points = np.array([[(, rows), (, ), (, ), (cols, rows)]])
# [[[ ], [ ], [ ], [ ]]]
roi_edges = roi_mask(edges, points) def roi_mask(img, corner_points):
# 创建掩膜
mask = np.zeros_like(img)
cv2.fillPoly(mask, corner_points, )
masked_img = cv2.bitwise_and(img, mask)
return masked_img
结果图 roi_edges如下:
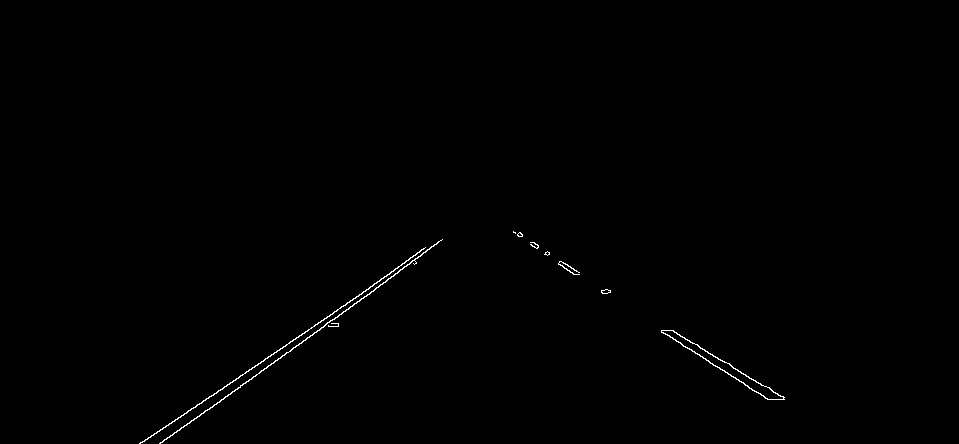
只保留关键区域的边缘检测图
霍夫直线提取
为了方便后续计算直线的斜率,我们使用统计概率霍夫直线变换(因为它能得到直线的起点和终点坐标):
# 霍夫变换参数
rho =
theta = np.pi /
threshold =
min_line_len =
max_line_gap =
def process_an_image(img):
# . 灰度化、滤波和Canny
# . 标记四个坐标点用于ROI截取
# . 霍夫直线提取
drawing, lines = hough_lines(roi_edges, rho, theta, threshold, min_line_len, max_line_gap)
def hough_lines(img, rho, theta, threshold, min_line_len, max_line_gap):
# 统计概率霍夫直线变换
lines = cv2.HoughLinesP(img, rho, theta, threshold, minLineLength=min_line_len, maxLineGap=max_line_gap)
# 新建一副空白画布
drawing = np.zeros((img.shape[], img.shape[], ), dtype=np.uint8)
# draw_lines(drawing, lines) # 画出直线检测结果
return drawing, lines
def draw_lines(img, lines, color=[, , ], thickness=):
for line in lines:
for x1, y1, x2, y2 in line:
cv2.line(img, (x1, y1), (x2, y2), color, thickness)
draw_lines()用来画直线检测的结果,后面我们会接着处理直线,所以这里注释掉了。可以取消注释看看效果:
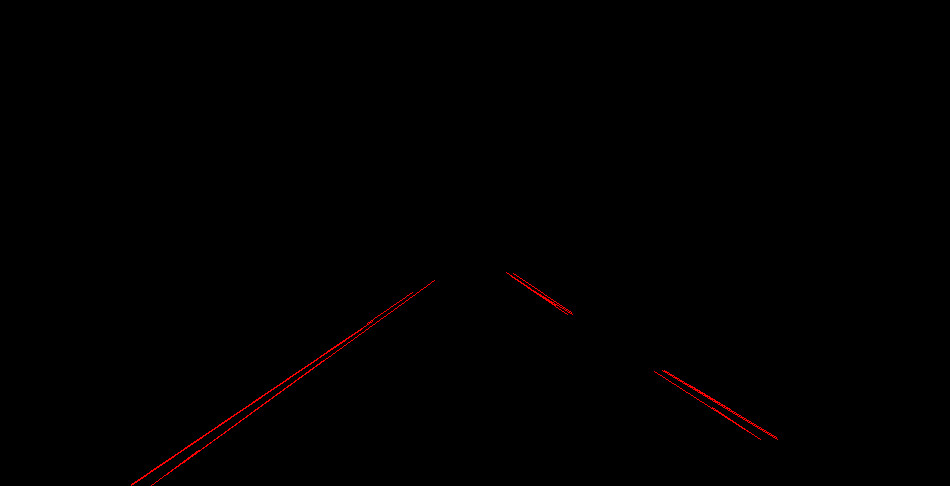
霍夫变换结果图
对本例的这张测试图来说,如果打印出直线的条数print(len(lines)),应该是16条
车道计算
前面通过霍夫变换得到了多条直线的地点和终点,我们的目的是通过某种算法只得到左右两条车道线
第一步、 根据斜率正负划分某条线是左车道还是右车道。
其中左车道(斜率 < 0),右车道(斜率 > 0)。原因如下图所示:
左车道与图像坐标系成钝角,斜率为负,右车道与图像坐标系成锐角,斜率为正。
第二步、迭代计算各直线斜率与斜率均值的差,排除掉差值过大的异常数据
第一次计算完斜率均值并排除掉异常值后,再在剩余的斜率中取均值,继续排除。一直迭代下去。
第三步、最小二乘法拟合左右车道线
经过第二步的筛选,就只剩下可能的左右车道线了。我们需要从多条直线中拟合出一条。使用最小二乘法,它通过最小化误差的平方和来寻找数据的最佳匹配函数。
假设目前可能的左车道线有6条,也就是12个坐标点。
我们的目标是拟合出这样一条直线:

使得误差平方和最小:

Python中可以直接使用 np.polyfit() 进行最小二乘法拟合
def process_an_image(img):
# . 灰度化、滤波和Canny
# . 标记四个坐标点用于ROI截取
# . 霍夫直线提取
# . 车道拟合计算
draw_lanes(drawing, lines)
# . 最终将结果合在原图上
result = cv2.addWeighted(img, 0.9, drawing, 0.2, )
return result
def draw_lanes(img, lines, color=[, , ], thickness=):
# a. 划分左右车道
left_lines, right_lines = [], []
for line in lines:
for x1, y1, x2, y2 in line:
k = (y2 - y1) / (x2 - x1)
if k < :
left_lines.append(line)
else:
right_lines.append(line)
if (len(left_lines) <= or len(right_lines) <= ):
return
# b. 清理异常数据
clean_lines(left_lines, 0.1)
clean_lines(right_lines, 0.1)
# c. 得到左右车道线点的集合,拟合直线
left_points = [(x1, y1) for line in left_lines for x1, y1, x2, y2 in line]
left_points = left_points + [(x2, y2) for line in left_lines for x1, y1, x2, y2 in line]
right_points = [(x1, y1) for line in right_lines for x1, y1, x2, y2 in line]
right_points = right_points + [(x2, y2) for line in right_lines for x1, y1, x2, y2 in line]
left_results = least_squares_fit(left_points, , img.shape[])
right_results = least_squares_fit(right_points, , img.shape[])
# 注意这里点的顺序
vtxs = np.array([[left_results[], left_results[], right_results[], right_results[]]])
# d. 填充车道区域
cv2.fillPoly(img, vtxs, (, , ))
# 或者只画车道线
# cv2.line(img, left_results[], left_results[], (, 0, 255), thickness)
# cv2.line(img, right_results[], right_results[], (, 0, 255), thickness) def clean_lines(lines, threshold):
# 迭代计算斜率均值,排除掉与差值差异较大的数据
slope = [(y2 - y1) / (x2 - x1) for line in lines for x1, y1, x2, y2 in line]
while len(lines) > :
mean = np.mean(slope)
diff = [abs(s - mean) for s in slope]
idx = np.argmax(diff)
if diff[idx] > threshold:
slope.pop(idx)
lines.pop(idx)
else:
break def least_squares_fit(point_list, ymin, ymax):
# 最小二乘法拟合
x = [p[] for p in point_list]
y = [p[] for p in point_list]
# polyfit第三个参数为拟合多项式的阶数,所以1代表线性
fit = np.polyfit(y, x, )
fit_fn = np.poly1d(fit) # 获取拟合的结果
xmin = int(fit_fn(ymin))
xmax = int(fit_fn(ymax))
return [(xmin, ymin), (xmax, ymax)]
最后得到的是左右两条车道线的起点和终点坐标。可以选择画出车道线,也可以填充整个区域:


画出车道线的效果不是很好,还是选用填充比较直观。
视频处理
搞定了一张图,视频的话也就没什么难度了。关键是视频帧的提取和合成,为此我们需要用到Python的视频编辑包 moviepy:
pip install moviepy
另外还需要 ffmpeg,首次运行moviepy时会自动下载。也可手动下载。建议手动下载,不知为什么,博主自动下载老是失败。ffmpeg-win32-v3.2.4.exe
只需要在开头导入 moviepy,然后主函数改掉就可以了,其余代码不需要修改:
# 开头导入moviepy
from moviepy.editor import VideoFileClip
# 主函数更改为:
if __name__ == "__main__":
output = 'test_videos/output.mp4'
clip = VideoFileClip("test_videos/cv2_white_lane.mp4")
out_clip = clip.fl_image(process_an_image)
out_clip.write_videofile(output, audio=False)
OpenCV-Python:车道检测的更多相关文章
- OpenCV—Python 轮廓检测 绘出矩形框(findContours\ boundingRect\rectangle
千万注意opencv的轮廓检测和边缘检测是两码事 本文链接:https://blog.csdn.net/wsp_1138886114/article/details/82945328 1 获取轮廓 O ...
- OpenCV + Python 人脸检测
必备知识 Haar-like opencv api 读取图片 灰度转换 画图 显示图像 获取人脸识别训练数据 探测人脸 处理人脸探测的结果 实例 图片素材 人脸检测代码 人脸检测结果 总结 下午的时候 ...
- 14、OpenCV Python 直线检测
__author__ = "WSX" import cv2 as cv import numpy as np #-----------------霍夫变换------------- ...
- OpenCV + python 实现人脸检测(基于照片和视频进行检测)
OpenCV + python 实现人脸检测(基于照片和视频进行检测) Haar-like 通俗的来讲,就是作为人脸特征即可. Haar特征值反映了图像的灰度变化情况.例如:脸部的一些特征能由矩形特征 ...
- 【python+opencv】直线检测+圆检测
Python+OpenCV图像处理—— 直线检测 直线检测理论知识: 1.霍夫变换(Hough Transform) 霍夫变换是图像处理中从图像中识别几何形状的基本方法之一,应用很广泛,也有很多改进 ...
- Opencv+Python实现缺陷检测
实验七.缺陷检测 一. 题目描述 对下面的图片进行缺陷检测操作,请详细地记录每一步操作的步骤. 第一站图片是标准样品,后面几张图中有几个样品有瑕疵,需要你通过计算在图片上显示出哪张是合格,哪张 ...
- [PyImageSearch] Ubuntu16.04 使用深度学习和OpenCV实现物体检测
上一篇博文中讲到如何用OpenCV实现物体分类,但是接下来这篇博文将会告诉你图片中物体的位置具体在哪里. 我们将会知道如何使用OpenCV‘s的dnn模块去加载一个预训练的物体检测网络,它能使得我们将 ...
- Yolo车辆检测+LaneNet车道检测
Yolo车辆检测+LaneNet车道检测 源代码:https://github.com/Dalaska/Driving-Scene-Understanding/blob/master/README.m ...
- OpenCV特征点检测------ORB特征
OpenCV特征点检测------ORB特征 ORB是是ORiented Brief的简称.ORB的描述在下面文章中: Ethan Rublee and Vincent Rabaud and Kurt ...
- OpenCV Python教程(3、直方图的计算与显示)
转载请详细注明原作者及出处,谢谢! 本篇文章介绍如何用OpenCV Python来计算直方图,并简略介绍用NumPy和Matplotlib计算和绘制直方图 直方图的背景知识.用途什么的就直接略过去了. ...
随机推荐
- Luogu4495 [HAOI2018] 奇怪的背包 【扩展欧几里得算法】
题目分析: 首先打个暴力求一下$10^9$以内因子最多的数的因子个数,发现只有$1344$个. 由于有$ax+by=k*(a,b)$和2017年noip的结论,所以我们可以发现对于任意多个数$a_1, ...
- 【XSY3320】string AC自动机 哈希 点分治
题目大意 给一棵树,每条边上有一个字符,求有多少对 \((x,y)(x<y)\),满足 \(x\) 到 \(y\) 路径上的边上的字符按顺序组成的字符串为回文串. \(1\leq n\leq 5 ...
- Docker 命令查询
Docker — 从入门到实践 Docker 命令查询 基本语法 Docker 命令有两大类,客户端命令和服务端命令.前者是主要的操作接口,后者用来启动 Docker Daemon. 客户端命令:基本 ...
- Codeforces Round #543
(比赛链接)[http://codeforces.com/contest/1120] A 给出一个长度为m的序列a 可以删除一些数 使得最后从没删的第一个数开始 每k个一截 截出的n个多重集合中 至少 ...
- [debian]use ISO as debian apt source / 使用ISO文件作为apt源
准备文件: debian-9.8.0-amd64-DVD-1.iso debian-9.8.0-amd64-DVD-2.iso debian-9.8.0-amd64-DVD-3.iso 挂载: roo ...
- 1068: [SCOI2007]压缩
题解: 区间DP 考虑状态的设计: \(dp[i][j][0/1]\)表示原字符串的\(i-j\)区间有无在中间加\(M\).并且默认在\(i\)之前加入\(M\)压缩后的最小长度,显然有转移: \[ ...
- 一加X 手机变砖过程
很久无使用的一台手机,因需要获得ROOT权限而使用kingroot这款软件,无法获得root权限.而这个软件会导致手机无法进入ERCOVERY模式,后果是你没有办法刷入别的rom,而kingroot的 ...
- 配置GitHub Push自动触发Jenkins的构建
这里以gitbook的项目为例,GitHub中的gitbook项目部署在Jenkins中,执行git push命令时自动执行Jenkins构建,其他项目只是最后的执行脚本不同 环境准备 安装Jenki ...
- 51nod1237 最大公约数之和
题目链接 题意 其实就是求 \[\sum\limits_{i=1}^n\sum\limits_{j=1}^ngcd(i,j)\] 思路 建议先看一下此题的一个弱化版 推一下式子 \[\sum\limi ...
- 享元模式-Flyweight(Java实现)
享元模式-Flyweight 享元模式的主要目的是实现对象的共享,即共享池,当系统中对象多的时候可以减少内存的开销,通常与工厂模式一起使用. 本文中的例子如下: 使用享元模式: 小明想看编程技术的书, ...