Bresenham算法
1 算法原理
基本原理从某处摘得:设直线方程为yi+1=yi+k(xi+1-xi)+k。假设列坐标象素已经确定为xi,其行坐标为yi。那么下一个象素的列坐标为xi+1,而行坐标要么为yi,要么递增1为yi+1。是否增1取决于误差项d的值。误差项d的初值d0=0,x坐标每增加1,d的值相应递增直线的斜率值k,即d=d+k。一旦d≥1,就把它减去1,这样保证d在0、1之间。当d≥0.5时,直线与垂线x=xi+1交点最接近于当前象素(xi,yi)的右上方象素(xi+1,yi+1);而当d<0.5时,更接近于右方象素(xi+1,yi)。为方便计算,令e=d-0.5,e的初值为-0.5,增量为k。当e≥0时,取当前象素(xi,yi)的右上方象素(xi+1,yi+1);而当e<0时,取(xi,yi)右方象素(xi+1,yi)。
由于显示直线的像素点只能取整数值坐标,可以假设直线上第i个像素点的坐标为(Xi,Yi),它是直线上点(Xi,Yi)最佳近似,并且Xi=Xi(假设m<1),如下图所示.那么直线上下一个像素点的可能位置是(Xi+1,Yi)或者(Xi+1,Yi+1).
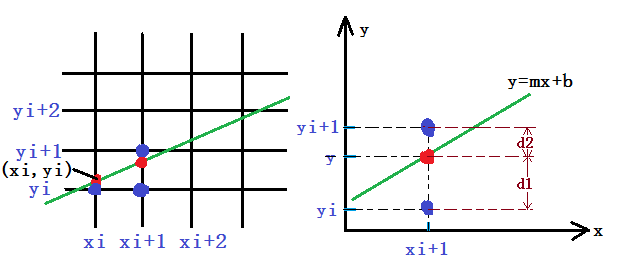
由图可知:在x=Xi+1处,直线上的点y的值是:y=m(Xi+1)+b,该点离像素点(Xi+1,Yi)和像素点(Xi+1,Yi+1)的距离分别为d1和d2。
d1 = Y - Yi = m(Xi+1)+b - Yi; (1)
d2 = (Yi+1) - Y = (Yi+1) - m(Xi+1) - b; (2)
两个距离的差是:
d1-d2 = 2m(Xi+1) - 2Yi + 2b -1; (3)
对于公式(3):
a:当此值为正时,d1>d2,说明直线上理论点离(Xi+1,Yi+1)像素较近,下一个像素点应取(Xi+1,Yi+1);
b:当此值为负时,d1<d2,说明直线上理论点离(Xi+1,Yi)像素较近,下一个像素点赢取(Xi+1,Yi);
c:当此值为零时,d1=d2,说明直线上理论点离上、下两个像素点的距离相等,取那个点都行,假设算法规定这种情况下取(Xi+1,Yi+1)作为下一个像素点。
因此只要利用(d1-d2)的符号就可以决定下一个像素点的选择。需进一步定义一个判别式:
Pi = △X × (d1-d2) = 2△Y·Xi - 2△X·Yi + c (4)
其中△X=(X2-X1)>0,因此Pi与(d1-d2)有相同的符号;
△Y=Y2-Y1;m=△Y/△X;c=2△Y+△X(2b-1)
对(4)进一步处理得出误差判别递推公式并消除常数c;
将(4)中的下标i改为i+1,得到:
Pi+1 = △X × (d1-d2) = 2△Y·Xi+1 - 2△X·Yi+1 + c (5)
假设直线的初始端点恰好是其像素点的坐标,即满足:
Y1 = mX1 + b ; (6)
由公式(4)和(6)得到p1的初始值:
P1 = 2△Y - △X; (7)
/*推导过程*/
Pi = △X × (d1-d2) = △Y·Xi - △X·Yi + c ()
Y1 = mX1 + b () P1 = △Y·X1 - △X·Y1 + c
= △Y·X1 - △X·(△Y/△X·X1+b) + c
= △Y·X1 - △Y·X1 - △X·b + c
= c - △X·b
= △Y+△X(2b-) - △X·b
= △Y - △X
所以可以用误差判别变量,得到如下算法表示:
初始:P1 = 2△Y - △X (8)
当Pi>=0时:Yi+1 = Yi + 1,Xi+1 = Xi + 1,Pi+1 = Pi + 2(△Y-△X)[根据公式(4)和(5)得出];
/*推导过程*/
Pi = △X × (d1-d2) = △Y·Xi - △X·Yi + c ()
Pi+1 = △X × (d1-d2) = △Y·Xi+1 - △X·Yi+1 + c () ()-()得: Pi+1 = Pi + (△Y·Xi+1)-△Y·Xi - (△X·Yi+1)+△X·Yi ∵ Pi> 时 Yi+1 = Yi + ,Xi+1 = Xi +
∴ Pi+1 = Pi + (△Y·(Xi + ))-△Y·Xi - (△X·(Yi + ))+△X·Yi
= Pi + (△Y-△X)
否则:Yi+1 = Yi,Xi+1=Xi + 1,Pi+1=Pi+2△y[根据公式(4)和(5)得出]
/*推导过程*/
Pi = △X × (d1-d2) = △Y·Xi - △X·Yi + c ()
Pi+1 = △X × (d1-d2) = △Y·Xi+1 - △X·Y(i+1) + c () ()-()得: Pi+1 = Pi + (△Y·Xi+1)-△Y·Xi - (△X·Yi+1)+△X·Yi ∵ Pi> 时 Yi+1 = Yi,Xi+1 = Xi +
∴ Pi+1 = Pi + (△Y·(Xi + ))-△Y·Xi - (△X·(Yi))+△X·Yi
= Pi + △Y
从(8)式可以看出,第i+1步的判别变量Pi+1仅与第i步的判别变量Pi、直线的两个端点坐标分量差△X和△Y有关,运算中只含有整数相加和乘2运算,而乘2可利用算术左移一位来完成,因此这个算法速度快并易于硬件实现。
Bresenham算法的更多相关文章
- 《图形学》实验七:中点Bresenham算法画椭圆
开发环境: VC++6.0,OpenGL 实验内容: 使用中点Bresenham算法画椭圆. 实验结果: 代码: #include <gl/glut.h> #define WIDTH 50 ...
- 《图形学》实验六:中点Bresenham算法画圆
开发环境: VC++6.0,OpenGL 实验内容: 使用中点Bresenham算法画圆. 实验结果: 代码: #include <gl/glut.h> #define WIDTH 500 ...
- 《图形学》实验五:改进的Bresenham算法画直线
开发环境: VC++6.0,OpenGL 实验内容: 使用改进的Bresenham算法画直线. 实验结果: 代码: //中点Bresenham算法生成直线 #include <gl/glut.h ...
- 《图形学》实验四:中点Bresenham算法画直线
开发环境: VC++6.0,OpenGL 实验内容: 使用中点Bresenham算法画直线. 实验结果: 代码: //中点Bresenham算法生成直线 #include <gl/glut.h& ...
- 利用canvas实现的中点Bresenham算法
Bresenham提出的直线生成算法的基本原理是,每次在最大位移方向上走一步,而另一个方向是走步还是不走步取决于误差项的判别,具体的实现过程大家可以去问度娘.我主要是利用canvas画布技术实现了这个 ...
- 通过Bresenham算法实现完成矢量线性多边形向栅格数据的转化
1.实验目的与要求 目的:通过本次实验,完成矢量线性多边形向栅格数据的转化过程: 要求:采用VC++6.0实现. 2.实验方法 采用Bresenham算法实现 3.实验材料 直线的定义:y = x/3 ...
- Bresenham算法画填充圆及SDL代码实现
画圆是计算机图形操作中一个非常重要的需求.普通的画圆算法需要大量的浮点数参与运算,而众所周知,浮点数的运算速度远低于整形数.而最终屏幕上影射的像素的坐标均为整形,不可能是连续的线,所以浮点数运算其实纯 ...
- 基于Bresenham算法画圆
bresenham算法画圆思想与上篇 bresenham算法画线段 思想是一致的 画圆x^2+y^2=R^2 将他分为8个部分,如上图 1. 只要画出1中1/8圆的圆周,剩下的就可以通过对称关系画出这 ...
- bresenham算法的FPGA的实现2
在上一篇里http://www.cnblogs.com/sepeng/p/4045593.html <bresenham算法的FPGA的实现1>已经做了一个整体框架的布局,但是那个程序只是 ...
- bresenham算法的FPGA的实现1
接着上一篇的 计算实现给出屏幕上任意两个点,求出这两个点之间直线上的所有的点.http://www.cnblogs.com/sepeng/p/4042464.html 这种直接算法的确是被鄙视了 强大 ...
随机推荐
- python webbrowser模块(浏览器操作)
webbrowser模块提供了一个高级接口来显现基于Web的文档,大部分情况下只需要简单的调用open()办法. webbrowser定义了如下的反常: exception webbrowser.Er ...
- check failed status == cudnn_status_success (4 vs. 0) cudnn_status_internal_error
Check failed: error == cudaSuccess (30 vs. 0) unknown error 这个有可能是显存不足造成的,或者网络参数不对造成的 check failed ...
- 某里巴巴Java工程师常规面试题以及解答
从HR弄来的P6-P7的JAVA工程师题目,分享给大家 1 Spring AOP和IOC的实现方法 http://blog.csdn.net/tarena_lixy/article/details/7 ...
- tensorflow-用DASC结合Inception-v3对imagenet2012聚类实现
一.目的 以imagenet2012作为数据集,用Inception-v3对图像提取特征作为输入,来训练一个自编码器. 以上作为预训练模型,随后在该自编码器的基础上,中间加入一个自表示层,将最终学习到 ...
- ROS学习备忘
1. remap的解释 For example, you are given a node that says it subscribes to the "chatter" top ...
- StringBuufer与StringBulder线程的区别
StringBulder的append方法 不是synchronized修饰的 线程不安全 效率相对很快StringBuufer的append方法 是 synchronized修饰的 ...
- 2019.04.26 mongaodb
打开服务 mongod.exe --dbpath E:\Develop\mongodb_64\data\db 在安装和打开服务之前要建一个db 文件的存储位置 然后打开服务 打开服务之后 打开图 ...
- Percona-Toolkit 之 pt-online-schema-change 总结
pt-online-schema-change - ALTER tables without locking them. pt-online-schema-change alters a table' ...
- 如何增加Ubuntu交换空间swap
如何增加Ubuntu交换空间swap 1 使用命令查看系统内swap分区大小 green@green:~$ free -m total used free shared buff/cache ava ...
- mysql----------mysql的一些常用命令
1.查询一张表中某个字段重复值的记录 select id,cert_number from (select id,cert_number,count(*)as n from 表明 group by c ...