32、从零开始写CMOS摄像头驱动
使用的内核:linux-3.4.2
参考源码:
第32课_新内核下的I2C驱动\i2c\1th_i2c_new_device
第2课第1.1.7节文档和图片(从0写USB摄像头)\myuvc
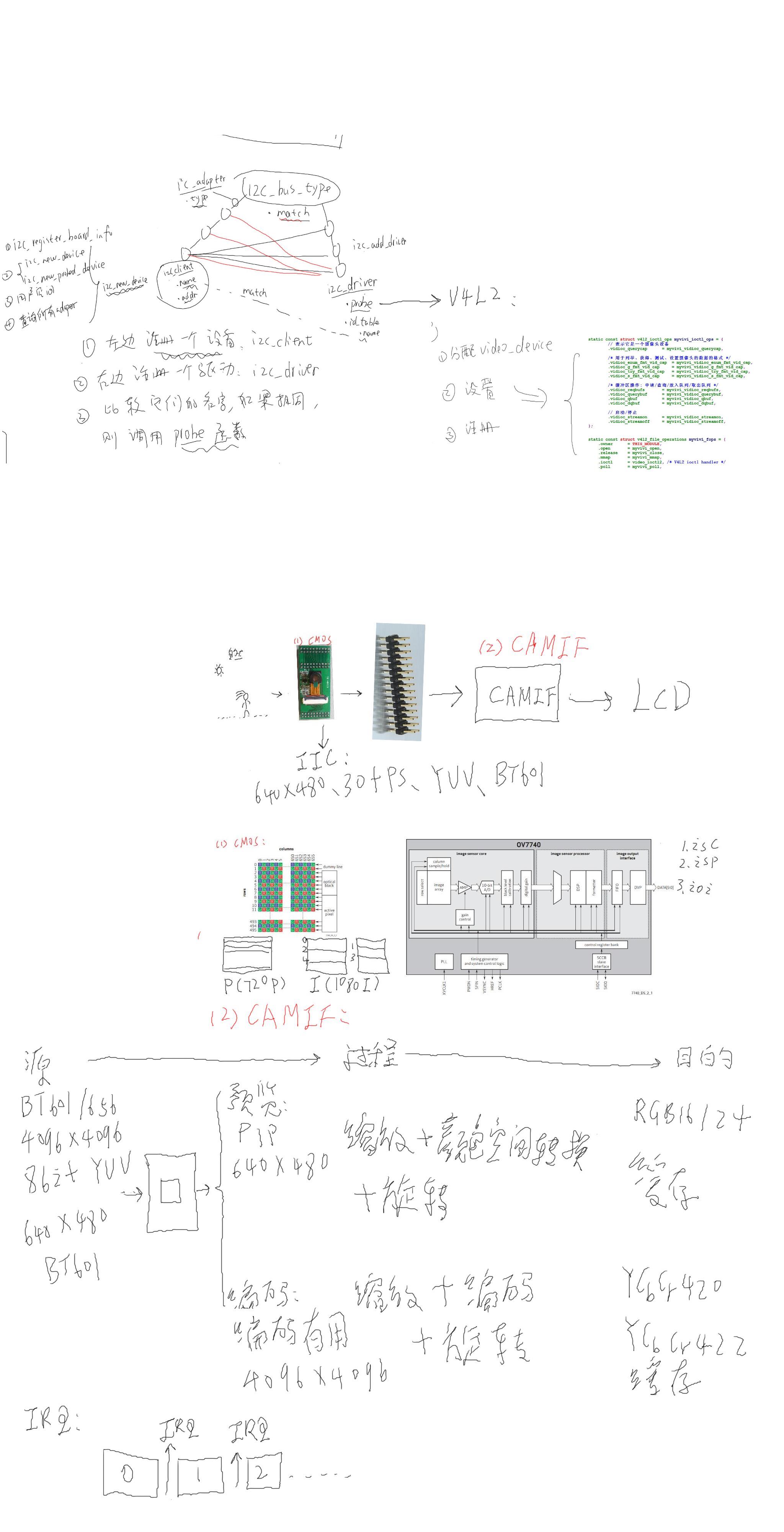
设备地址:
写 -- 0x42(01000010)
读 -- 0x43(01000011)
8bit的地址 = 7bit设备地址 + 1bit的读/写控制位
设备地址 = 0100001 = 0x21
问:为什么需要复位摄像头模块?
答:IIC能够正常操作CMOS摄像头模块内部的寄存器的前提是:
-- 提供符合它需求的系统时钟(CAMCLK)
-- 需要给它一个复位信号
问:怎样才能复位摄像头模块?
答:通过操作CAMIF控制器中相应的寄存器,让CAMRST发出复位
信号,从而复位摄像头模块,具体操作见驱动源码。
举例:说明CIPRCTRL寄存器
48字节(DMA需要传输的长度) = 10字节(DMA一次能传输的最大长度(Main burst length)) + 10字节 + 10字节 + 10字节 + 8字节(remain burst length)
burst length必须是2/4/8/16,不管是Main burst length或者remain burst length,计算方法见代码,计算的变量是使用一行有多少字在计算
/*
CIPRSCPRERATIO:
bit[31:28]: 预览缩放的变化系数(SHfactor_Pr)
bit[22:16]: 预览缩放的水平比(PreHorRatio_Pr)
bit[6:0]: 预览缩放的垂直比(PreVerRatio_Pr)
CIPRSCPREDST:
bit[27:16]: 预览缩放的目标宽度(PreDstWidth_Pr)
bit[11:0]: 预览缩放的目标高度(PreDstHeight_Pr)
CIPRSCCTRL:
bit[29:28]: 告诉摄像头控制器(图片是缩小、放大)(ScaleUpDown_Pr)
bit[24:16]: 预览主缩放的水平比(MainHorRatio_Pr)
bit[8:0]: 预览主缩放的垂直比(MainVerRatio_Pr)
bit[31]: 必须固定设置为1
bit[30]: 设置图像输出格式是RGB16、RGB24
bit[15]: 预览缩放开始
*/
cmos_ov7740_calculate_scaler_info();缩放函数的具体计算方法可以见s3c2440手册Figure23-12图的下面
驱动测试条件:
1.
要有IIC总线驱动;
要有LCD驱动;
2.
要配置上V4L2相关选项
Device Drivers --->
<*> Multimedia support --->
<*> Video For Linux
[*] Video capture adapters (NEW) --->
[*] V4L USB devices (NEW) --->
[*] V4L platform devices --->
32、从零开始写CMOS摄像头驱动的更多相关文章
- 29、从零写USB摄像头驱动之通过urb接受数据后上报数据是函数中fid的作用
原因分析如下: 视频数据是由一帧一帧数据组成,为了防止数据错乱,会给每一帧数据分配一个frameid,从第0帧开始,接着是第1帧,接着又是第0帧这样交错进行的,对usb摄像头来说每一帧数据来源于多个包 ...
- Linux摄像头驱动学习之:(三)从零写虚拟驱动(仿照vivi.c)
本篇仿照vivi.c 写虚拟视频驱动,代码(myvivi.c+fillbuf.c+Makefile)如下: //==========================myvivi.c========== ...
- Linux USB摄像头驱动【转】
本文转载自:http://www.itdadao.com/articles/c15a509940p0.html 在 cortex-a8 中,可接入摄像头的接口通常可以分为两种, CAMERA 接口和 ...
- Linux USB 摄像头驱动
在 cortex-a8 中,可接入摄像头的接口通常可以分为两种, CAMERA 接口和 USB 接口的摄像头.这一章主要是介绍 USB 摄像头的设备驱动程序.在我们印象中,驱动程序都是一个萝卜一个坑, ...
- V4L2(二)虚拟摄像头驱动vivi深入分析【转】
转自:http://www.cnblogs.com/tureno/articles/6694463.html 转载于: http://blog.csdn.net/lizuobin2/article/d ...
- 31、CMOS摄像头说明
ov7740(摄像头模块) 输入信号: 自然景观等的模拟信号输出信号: RGB.YUV格式的数字信号 1). 常用参数输入信号: 自然景观等的模拟信号输出信号: 输出格式为:RAW RGB.YUV输出 ...
- 2018-10-20-C#-从零开始写-SharpDx-应用-初始化dx修改颜色
title author date CreateTime categories C# 从零开始写 SharpDx 应用 初始化dx修改颜色 lindexi 2018-10-20 17:34:37 +0 ...
- C# 从零开始写 SharpDx 应用 初始化dx修改颜色
原文:C# 从零开始写 SharpDx 应用 初始化dx修改颜色 版权声明:博客已迁移到 https://blog.lindexi.com 欢迎访问.如果当前博客图片看不到,请到 https://bl ...
- 荣品RP4412开发板摄像头驱动调用及对焦控制
1.关于更换不同摄像头驱动调用问题. 问:RP4412开发板,我用的摄像头640*480图像预览时OK的,但是我调用1280*720的初始化预览,摄像头没有图像了,是不是camera程序也需要修改? ...
随机推荐
- CSS Loading 特效
全页面遮罩效果loading css: .loading_shade { position: fixed; left:; top:; width: 100%; height: 100%; displa ...
- POJ——T 2891 Strange Way to Express Integers
http://poj.org/problem?id=2891 Time Limit: 1000MS Memory Limit: 131072K Total Submissions: 16849 ...
- 洛谷 P1358 扑克牌
P1358 扑克牌 题目描述 组合数学是数学的重要组成部分,是一门研究离散对象的科学,它主要研究满足一定条件的组态(也称组合模型)的存在.计数以及构造等方面的问题.组合数学的主要内容有组合计数.组合设 ...
- Android中的MVP架构初探
说来羞愧,MVP的架构模式已经在Android领域出现一两年了.可是到今天自己才開始Android领域中的MVP架构征程. 闲话不多说,開始吧. 一.架构演变概述 我记得我找第一份工作时,面试官问我& ...
- ABAP调用外部WebService
TCode:se80 选择 Package,输入我们自己的开发包,后回车 右击 开发包名称,选择菜单 出现创建向导窗体 选择"Service Consumer",点击 继续 选择& ...
- TextView- 内容过长省略号设定
<LinearLayout android:layout_width="fill_parent" android:layout_height="wrap_conte ...
- MD5和sha1加密算法--散列加密技术 MD5:128bit的大整数
在很多电子商务和社区应用中,我们都要存放很多的客户的资料,其中包括了很多的隐私信息和客户不愿被别人看到的信息,当然好有客户执行各种操作的密码,此时就需要对客户的信息进行加密再存储,目前有两种比较好的加 ...
- TypeScript基础知识
一. TypeScript是js的超集,可以应用所有js语法 二. 特点: 1. 优点 a. 可以在编译阶段就发现大部分错误,这总比在运行时候出错好 b. 同一目录下不同文件中,使用统一命名,会有命名 ...
- 10. LCD驱动程序 ——框架分析
引言: 由LCD的硬件原理及操作(可参看韦哥博客:第017课 LCD原理详解及裸机程序分析) 我们知道只要LCD控制器的相关寄存器正确配置好,就可以在LCD面板上显示framebuffer中的内容. ...
- Windows上安装多个MySQL实例(转)
在学习和开发过程中有时候会用到多个MySQL数据库,比如Master-Slave集群.分库分表,开发阶段在一台机器上安装多个MySQL实例就显得方便不少. 在 MySQL教程-基础篇-1.1-Wind ...