Jetson TX1使用usb camera采集图像 (1)
使用python实现
https://jkjung-avt.github.io/tx2-camera-with-python/
How to Capture and Display Camera Video with Python on Jetson TX2
Oct 19, 2017
Quick link: tegra-cam.py
In this post I share how to use python code (with OpenCV) to capture and display camera video on Jetson TX2, including IP CAM, USB webcam and the Jetson onboard camera. This sample code should work on Jetson TX1 as well.
Prerequisite:
- OpenCV with GStreamer and python support needs to be built and installed on the Jetson TX2. I use opencv-3.4.0 and python3. You can refer to my earlier post for how to build and install OpenCV with python support: How to Install OpenCV (3.4.0) on Jetson TX2.
- If you’d like to test with an IP CAM, you need to have it set up and know its RTSP URI, e.g. rtsp://admin:XXXXX@192.168.1.64:554.
- Hook up a USB webcam (I was using Logitech C920) if you’d like to test with it. The USB webcam would usually be instantiated as /dev/video1, since the Jetson onboard camera has occupied /dev/video0.
- Install gstreamer1.0-plugins-bad-xxx which include the
h264parseelement. This is required for decoding H.264 RTSP stream from IP CAM.
- $ sudo apt-get install gstreamer1.0-plugins-bad-faad \
- gstreamer1.0-plugins-bad-videoparsers
Reference:
- I developed my code based on this canny edge detector sample code.
- ACCELERATED GSTREAMER FOR TEGRA X2 USER GUIDE: Descriptions of nvcamerasrc, nvvidconv and omxh264dec could be found in this document.
How to run the Tegra camera sample code:
- Download the
tegra-cam.pysource code from my GitHubGist: https://gist.github.com/jkjung-avt/86b60a7723b97da19f7bfa3cb7d2690e - To capture and display video using the Jetson onboard camera, try the following. By default the camera resolution is set to 1920x1080 @ 30fps.
- $ python3 tegra-cam.py
- To use a USB webcam and set video resolution to 1280x720, try the following. The ‘–vid 1’ means using /dev/video1.
- $ python3 tegra-cam.py --usb --vid 1 --width 1280 --height 720
- To use an IP CAM, try the following command, while replacing the last argument with RTSP URI for you own IP CAM.
- $ python3 tegra-cam.py --rtsp --uri rtsp://admin:XXXXXX@192.168.1.64:554
Discussions:
The crux of this tegra-cam.py script lies in the GStreamer pipelines I use to call cv.VideoCapture(). In my experience, using nvvidconv to do image scaling and to convert color format to BGRx (note that OpenCV requires BGR as the final output) produces better results in terms of frame rate.
- def open_cam_rtsp(uri, width, height, latency):
- gst_str = ("rtspsrc location={} latency={} ! rtph264depay ! h264parse ! omxh264dec ! "
- "nvvidconv ! video/x-raw, width=(int){}, height=(int){}, format=(string)BGRx ! "
- "videoconvert ! appsink").format(uri, latency, width, height)
- return cv2.VideoCapture(gst_str, cv2.CAP_GSTREAMER)
- def open_cam_usb(dev, width, height):
- # We want to set width and height here, otherwise we could just do:
- # return cv2.VideoCapture(dev)
- gst_str = ("v4l2src device=/dev/video{} ! "
- "video/x-raw, width=(int){}, height=(int){}, format=(string)RGB ! "
- "videoconvert ! appsink").format(dev, width, height)
- return cv2.VideoCapture(gst_str, cv2.CAP_GSTREAMER) #该命令在测试时无法启动摄像头,但采用"return cv2.VideoCapture(0)"可以正常显示,I don`t know ???
- def open_cam_onboard(width, height): # On versions of L4T previous to L4T 28.1, flip-method=2 # Use Jetson onboard camera gst_str = ("nvcamerasrc ! " "video/x-raw(memory:NVMM), width=(int)2592, height=(int)1458, format=(string)I420, framerate=(fraction)30/1 ! " "nvvidconv ! video/x-raw, width=(int){}, height=(int){}, format=(string)BGRx ! " "videoconvert ! appsink").format(width, height) return cv2.VideoCapture(gst_str, cv2.CAP_GSTREAMER)
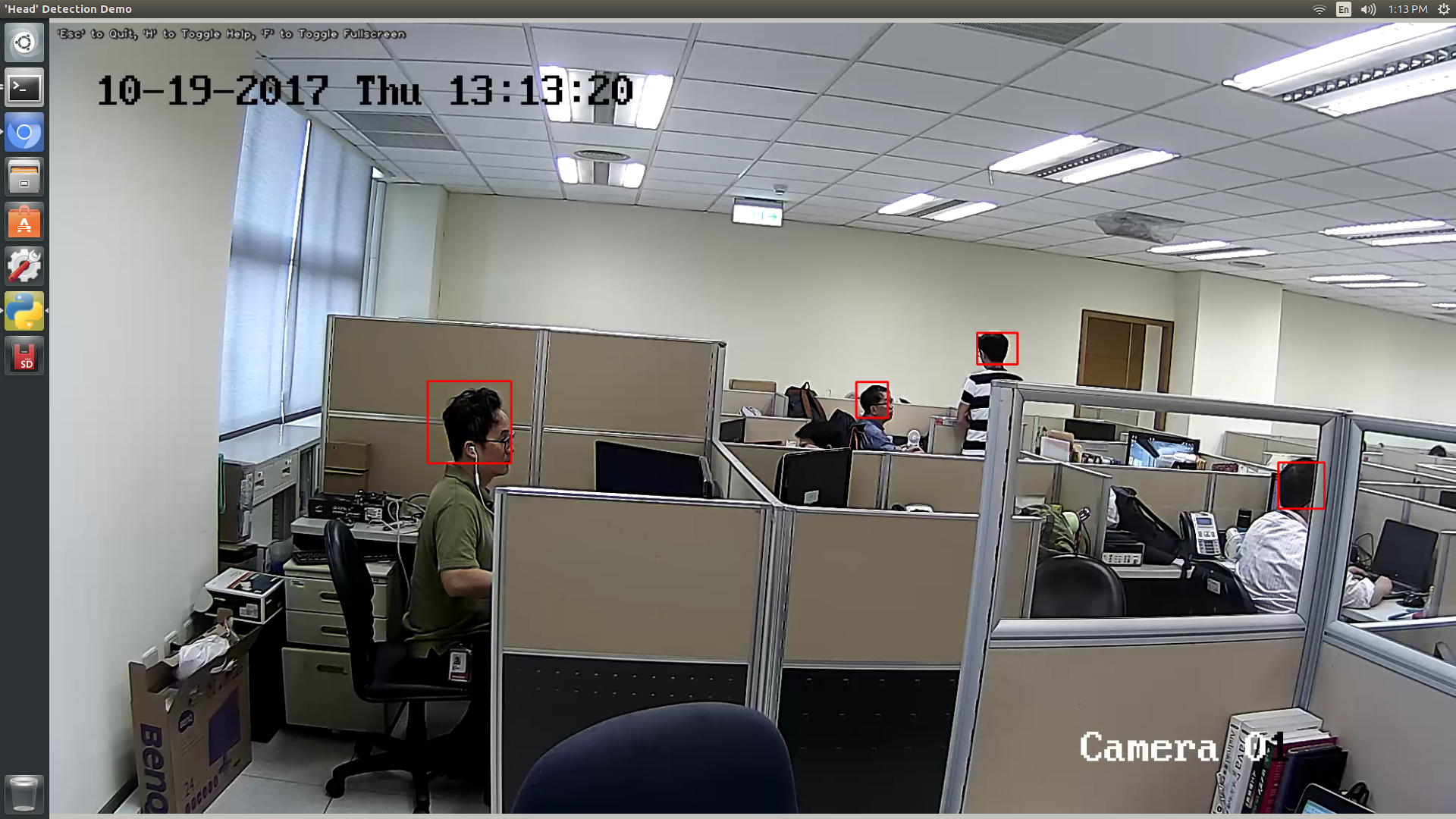
Here’s a screenshot of my Jetson TX2 running tegra-cam.py with a live IP CAM video feed. (I also hooked up a Faster R-CNN model to do human head detection and draw bounding boxes on the captured images here, but the main video capture/display code was the same.)
If you like this post or have any questions, feel free to leave a comment below. Otherwise be sure to also check out my next post How to Capture Camera Video and Do Caffe Inferencing with Python on Jetson TX2, in which I demonstrate how to feed live camera images into a Caffe pipeline for real-time inferencing.
Jetson TX1使用usb camera采集图像 (1)的更多相关文章
- Jetson TX1使用usb camera采集图像 (2)
该方法只启动usb摄像头 import cv2 import numpy import matplotlib.pyplot as plot class Camera: cap = cv2.VideoC ...
- Camera 采集图像的方法
使用 Camera 采集图像, 实现步骤如下: 需要权限: android.permission.CAMERA android.permission.WRITE_EXTERNAL_STORAGE // ...
- 【Xilinx-Petalinux学习】-06-OpenCV通过USB摄像头采集图像。
占位, 实现USB摄像头的图像采集与保存
- 基于英伟达Jetson TX1的GPU处理平台
基于英伟达Jetson TX1 GPU的HDMI图像输入的深度学习套件 [309] 本平台基于英伟达的Jetson TX1视觉计算的全功能开发板,配合本公司研发的HDMI输入图像采集板:Jetson ...
- camera按键采集图像及waitKey的用法(转)
源: camera按键采集图像及waitKey的用法
- camera按键采集图像及waitKey的用法
前言 项目需要通过摄像头采集图像并保存,主要是用于后续的摄像头标定.实现过程其实很简单,需要注意一些细节. 系统环境 系统版本:ubuntu16.04:opencv版本:opencv2.4.13:编程 ...
- [转]Jetson TX1 开发教程(1)配置与刷机
开箱 Jetson TX1是英伟达公司新出的GPU开发板,拥有世界上先进的嵌入式视觉计算系统,提供高性能.新技术和极佳的开发平台.在进行配置和刷机工作之前,先来一张全家福: 可以看到,Jetson T ...
- 【并行计算-CUDA开发】 NVIDIA Jetson TX1
概述 NVIDIA Jetson TX1是计算机视觉系统的SoM(system-on-module)解决方案.它组合了最新的NVIDIAMaxwell GPU架构,其具有ARM Cortex-A57 ...
- ffmpeg从USB摄像头采集一张原始图片(转)
本文讲解使用ffmpeg从USB摄像头中采集一帧数据并写入文件保存,测试平台使用全志A20平台,其他平台修改交叉工具链即可移植.开发环境使用eclipse+CDT.交叉工具链使用arm-Linux-g ...
随机推荐
- 【Vue】 ----- 浅谈vue的生命周期
一.概念 vue生命周期,又叫生命周期钩子函数,是组件从创建到销毁的过程. 二.主要的八大生命周期 1.首先,为方便观察每个周期的特点,我们模拟一个"one"组件的创建与销毁,并在 ...
- 【我们一起写框架】MVVM的WPF框架(四)—DataGrid
前言 这个框架写到这里,应该有很多同学发现,框架很多地方的细节,其实是违背了MVVM的设计逻辑的. 没错,它的确是违背了. 但为什么明知道违背设计逻辑,还要这样编写框架呢? 那是因为,我们编写的是框架 ...
- asp.net 仿微信端菜单设置
第一步:添加引用文件 <link rel="stylesheet" href="~/assets/css/bootstrap.min.css"> & ...
- ACM字符串输入问题
坑死了..竟然被这个问题困扰了大半个学期,今天搜来翻去终于弄明白了一些,以后固定用这几种用法好了不然总出错QAQ实际测试例子就没放了,死记这里就够用了T-T 概念: gets()函数:用来从标准输入设 ...
- Java HashMap 使用了未经检查或不安全的操作
今天在做接口测试的时候使用了Java中的Map(java 所知胜少,因项目需要提供示例),不扯犊子了,我们直接看一个代码文件名:Test.java: import java.util.ArrayLis ...
- 使用curl制作简易百度搜索
这几天研究了一下php中的curl类库,做了一个简单的百度搜索,先上代码 <div style="width:200px;height:100px;"> <div ...
- java 设计模式 ---- 工场模式
官方描述: 定义一个创建对象的接口,让其子类自己决定实例化哪一个工厂类 土话描述: 先把所有的情况设先计出来, 后面根据条件实现哪种情况 比如我想找女朋友, 喜欢的类型可能是: 屁股大的, 胸挺的, ...
- 安装Docker时错误提示 "could not change group /var/run/docker.sock to docker: group docker not found"的解决方案
安装Dock服务,主要命令是 yum install docker. 但是在启动的时候报错:warning msg="could not change group /var/run/doc ...
- Linux学习历程——Centos 7 ls命令
一.命令介绍 ls命令用于显示目录中的信息. ----------------------------------------------------------------------------- ...
- 数据加密算法--详解DES加密算法原理与实现
DES算法简介 DES(Data Encryption Standard)是目前最为流行的加密算法之一.DES是对称的,也就是说它使用同一个密钥来加密和解密数据. DES还是一种分组加密算法,该算法每 ...