强化学习(十一) Prioritized Replay DQN
在强化学习(十)Double DQN (DDQN)中,我们讲到了DDQN使用两个Q网络,用当前Q网络计算最大Q值对应的动作,用目标Q网络计算这个最大动作对应的目标Q值,进而消除贪婪法带来的偏差。今天我们在DDQN的基础上,对经验回放部分的逻辑做优化。对应的算法是Prioritized Replay DQN。
本章内容主要参考了ICML 2016的deep RL tutorial和Prioritized Replay DQN的论文<Prioritized Experience Replay>(ICLR 2016)。
1. Prioritized Replay DQN之前算法的问题
在Prioritized Replay DQN之前,我们已经讨论了很多种DQN,比如Nature DQN, DDQN等,他们都是通过经验回放来采样,进而做目标Q值的计算的。在采样的时候,我们是一视同仁,在经验回放池里面的所有的样本都有相同的被采样到的概率。
但是注意到在经验回放池里面的不同的样本由于TD误差的不同,对我们反向传播的作用是不一样的。TD误差越大,那么对我们反向传播的作用越大。而TD误差小的样本,由于TD误差小,对反向梯度的计算影响不大。在Q网络中,TD误差就是目标Q网络计算的目标Q值和当前Q网络计算的Q值之间的差距。
这样如果TD误差的绝对值$|\delta(t)|$较大的样本更容易被采样,则我们的算法会比较容易收敛。下面我们看看Prioritized Replay DQN的算法思路。
2. Prioritized Replay DQN算法的建模
Prioritized Replay DQN根据每个样本的TD误差绝对值$|\delta(t)|$,给定该样本的优先级正比于$|\delta(t)|$,将这个优先级的值存入经验回放池。回忆下之前的DQN算法,我们仅仅只保存和环境交互得到的样本状态,动作,奖励等数据,没有优先级这个说法。
由于引入了经验回放的优先级,那么Prioritized Replay DQN的经验回放池和之前的其他DQN算法的经验回放池就不一样了。因为这个优先级大小会影响它被采样的概率。在实际使用中,我们通常使用SumTree这样的二叉树结构来做我们的带优先级的经验回放池样本的存储。
具体的SumTree树结构如下图:
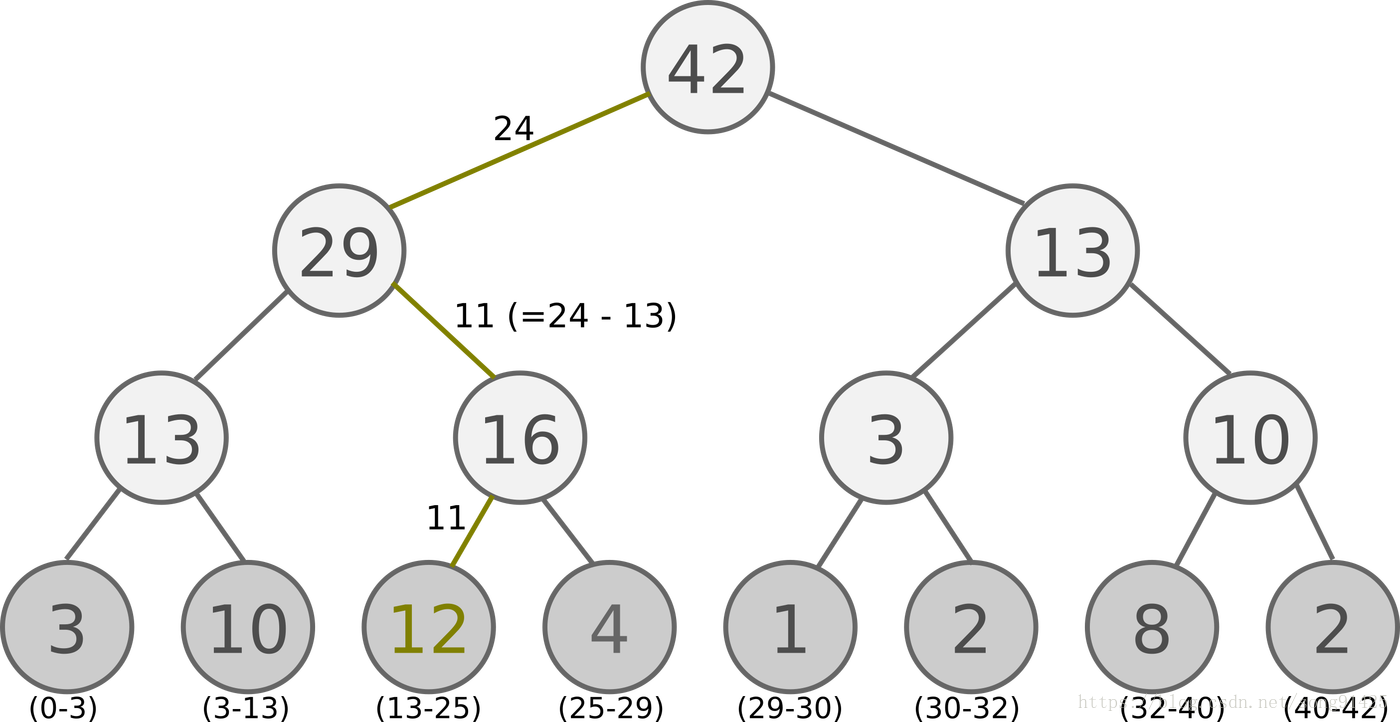
所有的经验回放样本只保存在最下面的叶子节点上面,一个节点一个样本。内部节点不保存样本数据。而叶子节点除了保存数据以外,还要保存该样本的优先级,就是图中的显示的数字。对于内部节点每个节点只保存自己的儿子节点的优先级值之和,如图中内部节点上显示的数字。
这样保存有什么好处呢?主要是方便采样。以上面的树结构为例,根节点是42,如果要采样一个样本,那么我们可以在[0,42]之间做均匀采样,采样到哪个区间,就是哪个样本。比如我们采样到了26, 在(25-29)这个区间,那么就是第四个叶子节点被采样到。而注意到第三个叶子节点优先级最高,是12,它的区间13-25也是最长的,会比其他节点更容易被采样到。
如果要采样两个样本,我们可以在[0,21],[21,42]两个区间做均匀采样,方法和上面采样一个样本类似。
类似的采样算法思想我们在word2vec原理(三) 基于Negative Sampling的模型第四节中也有讲到。
除了经验回放池,现在我们的Q网络的算法损失函数也有优化,之前我们的损失函数是:$$\frac{1}{m}\sum\limits_{j=1}^m(y_j-Q(\phi(S_j),A_j,w))^2$$
现在我们新的考虑了样本优先级的损失函数是$$\frac{1}{m}\sum\limits_{j=1}^mw_j(y_j-Q(\phi(S_j),A_j,w))^2$$
其中$w_j$是第j个样本的优先级权重,由TD误差$|\delta(t)|$归一化得到。
第三个要注意的点就是当我们对Q网络参数进行了梯度更新后,需要重新计算TD误差,并将TD误差更新到SunTree上面。
除了以上三个部分,Prioritized Replay DQN和DDQN的算法流程相同。
3. Prioritized Replay DQN算法流程
下面我们总结下Prioritized Replay DQN的算法流程,基于上一节的DDQN,因此这个算法我们应该叫做Prioritized Replay DDQN。主流程参考论文<Prioritized Experience Replay>(ICLR 2016)。
算法输入:迭代轮数$T$,状态特征维度$n$, 动作集$A$, 步长$\alpha$,采样权重系数$\beta$,衰减因子$\gamma$, 探索率$\epsilon$, 当前Q网络$Q$,目标Q网络$Q'$, 批量梯度下降的样本数$m$,目标Q网络参数更新频率$C$, SumTree的叶子节点数$S$。
输出:Q网络参数。
1. 随机初始化所有的状态和动作对应的价值$Q$. 随机初始化当前Q网络的所有参数$w$,初始化目标Q网络$Q'$的参数$w' = w$。初始化经验回放SumTree的默认数据结构,所有SumTree的S个叶子节点的优先级$p_j$为1。
2. for i from 1 to T,进行迭代。
a) 初始化S为当前状态序列的第一个状态, 拿到其特征向量$\phi(S)$
b) 在Q网络中使用$\phi(S)$作为输入,得到Q网络的所有动作对应的Q值输出。用$\epsilon-$贪婪法在当前Q值输出中选择对应的动作$A$
c) 在状态$S$执行当前动作$A$,得到新状态$S'$对应的特征向量$\phi(S')$和奖励$R$,是否终止状态is_end
d) 将$\{\phi(S),A,R,\phi(S'),is\_end\}$这个五元组存入SumTree
e) $S=S'$
f) 从SumTree中采样$m$个样本$\{\phi(S_j),A_j,R_j,\phi(S'_j),is\_end_j\}, j=1,2.,,,m$,每个样本被采样的概率基于$P(j) = \frac{p_j}{\sum\limits_i(p_i)}$,损失函数权重$w_j = (N*P(j))^{-\beta}/\max_i(w_i)$,计算当前目标Q值$y_j$:$$y_j= \begin{cases} R_j& {is\_end_j\; is \;true}\\ R_j + \gamma Q'(\phi(S'_j),\arg\max_{a'}Q(\phi(S'_j),a,w),w')& {is\_end_j\; is \;false} \end{cases}$$
g) 使用均方差损失函数$\frac{1}{m}\sum\limits_{j=1}^mw_j(y_j-Q(\phi(S_j),A_j,w))^2$,通过神经网络的梯度反向传播来更新Q网络的所有参数$w$
h) 重新计算所有样本的TD误差$\delta_j = y_j- Q(\phi(S_j),A_j,w)$,更新SumTree中所有节点的优先级$p_j = |\delta_j|$
i) 如果T%C=1,则更新目标Q网络参数$w'=w$
j) 如果$S'$是终止状态,当前轮迭代完毕,否则转到步骤b)
注意,上述第二步的f步和g步的Q值计算也都需要通过Q网络计算得到。另外,实际应用中,为了算法较好的收敛,探索率$\epsilon$需要随着迭代的进行而变小。
4. Prioritized Replay DDQN算法流程
下面我们给出Prioritized Replay DDQN算法的实例代码。仍然使用了OpenAI Gym中的CartPole-v0游戏来作为我们算法应用。CartPole-v0游戏的介绍参见这里。它比较简单,基本要求就是控制下面的cart移动使连接在上面的pole保持垂直不倒。这个任务只有两个离散动作,要么向左用力,要么向右用力。而state状态就是这个cart的位置和速度, pole的角度和角速度,4维的特征。坚持到200分的奖励则为过关。
完整的代码参见我的github: https://github.com/ljpzzz/machinelearning/blob/master/reinforcement-learning/ddqn_prioritised_replay.py, 代码中的SumTree的结构和经验回放池的结构参考了morvanzhou的github代码。
这里重点讲下和第三节中算法描述不同的地方,主要是$w_j$的计算。注意到:$$w_j = \frac{ (N*P(j))^{-\beta}}{\max_i(w_i)} = \frac{ (N*P(j))^{-\beta}}{\max_i((N*P(i))^{-\beta})} = \frac{ (P(j))^{-\beta}}{\max_i((P(i))^{-\beta})} =( \frac{p_j}{\min_iP(i)})^{-\beta}$$
因此代码里面$w_j$,即ISWeights的计算代码是这样的:
def sample(self, n):
b_idx, b_memory, ISWeights = np.empty((n,), dtype=np.int32), np.empty((n, self.tree.data[0].size)), np.empty((n, 1))
pri_seg = self.tree.total_p / n # priority segment
self.beta = np.min([1., self.beta + self.beta_increment_per_sampling]) # max = 1 min_prob = np.min(self.tree.tree[-self.tree.capacity:]) / self.tree.total_p # for later calculate ISweight
if min_prob == 0:
min_prob = 0.00001
for i in range(n):
a, b = pri_seg * i, pri_seg * (i + 1)
v = np.random.uniform(a, b)
idx, p, data = self.tree.get_leaf(v)
prob = p / self.tree.total_p
ISWeights[i, 0] = np.power(prob/min_prob, -self.beta)
b_idx[i], b_memory[i, :] = idx, data
return b_idx, b_memory, ISWeights
上述代码的采样在第二节已经讲到。根据树的优先级的和total_p和采样数n,将要采样的区间划分为n段,每段来进行均匀采样,根据采样到的值落到的区间,决定被采样到的叶子节点。当我们拿到第i段的均匀采样值v以后,就可以去SumTree中找对应的叶子节点拿样本数据,样本叶子节点序号以及样本优先级了。代码如下:
def get_leaf(self, v):
"""
Tree structure and array storage:
Tree index:
0 -> storing priority sum
/ \
1 2
/ \ / \
3 4 5 6 -> storing priority for transitions
Array type for storing:
[0,1,2,3,4,5,6]
"""
parent_idx = 0
while True: # the while loop is faster than the method in the reference code
cl_idx = 2 * parent_idx + 1 # this leaf's left and right kids
cr_idx = cl_idx + 1
if cl_idx >= len(self.tree): # reach bottom, end search
leaf_idx = parent_idx
break
else: # downward search, always search for a higher priority node
if v <= self.tree[cl_idx]:
parent_idx = cl_idx
else:
v -= self.tree[cl_idx]
parent_idx = cr_idx data_idx = leaf_idx - self.capacity + 1
return leaf_idx, self.tree[leaf_idx], self.data[data_idx]
除了采样部分,要注意的就是当梯度更新完毕后,我们要去更新SumTree的权重,代码如下,注意叶子节点的权重更新后,要向上回溯,更新所有祖先节点的权重。
self.memory.batch_update(tree_idx, abs_errors) # update priority
def batch_update(self, tree_idx, abs_errors):
abs_errors += self.epsilon # convert to abs and avoid 0
clipped_errors = np.minimum(abs_errors, self.abs_err_upper)
ps = np.power(clipped_errors, self.alpha)
for ti, p in zip(tree_idx, ps):
self.tree.update(ti, p)
def update(self, tree_idx, p):
change = p - self.tree[tree_idx]
self.tree[tree_idx] = p
# then propagate the change through tree
while tree_idx != 0: # this method is faster than the recursive loop in the reference code
tree_idx = (tree_idx - 1) // 2
self.tree[tree_idx] += change
除了上面这部分的区别,和DDQN比,TensorFlow的网络结构流程中多了一个TD误差的计算节点,以及损失函数多了一个ISWeights系数。此外,区别不大。
5. Prioritized Replay DQN小结
Prioritized Replay DQN和DDQN相比,收敛速度有了很大的提高,避免了一些没有价值的迭代,因此是一个不错的优化点。同时它也可以直接集成DDQN算法,所以是一个比较常用的DQN算法。
下一篇我们讨论DQN家族的另一个优化算法Duel DQN,它将价值Q分解为两部分,第一部分是仅仅受状态但不受动作影响的部分,第二部分才是同时受状态和动作影响的部分,算法的效果也很好。
(欢迎转载,转载请注明出处。欢迎沟通交流: liujianping-ok@163.com)
强化学习(十一) Prioritized Replay DQN的更多相关文章
- 【转载】 强化学习(十一) Prioritized Replay DQN
原文地址: https://www.cnblogs.com/pinard/p/9797695.html ------------------------------------------------ ...
- 强化学习(十二) Dueling DQN
在强化学习(十一) Prioritized Replay DQN中,我们讨论了对DQN的经验回放池按权重采样来优化DQN算法的方法,本文讨论另一种优化方法,Dueling DQN.本章内容主要参考了I ...
- 强化学习(四)—— DQN系列(DQN, Nature DQN, DDQN, Dueling DQN等)
1 概述 在之前介绍的几种方法,我们对值函数一直有一个很大的限制,那就是它们需要用表格的形式表示.虽说表格形式对于求解有很大的帮助,但它也有自己的缺点.如果问题的状态和行动的空间非常大,使用表格表示难 ...
- 强化学习(3)-----DQN
看这篇https://blog.csdn.net/qq_16234613/article/details/80268564 1.DQN 原因:在普通的Q-learning中,当状态和动作空间是离散且维 ...
- 强化学习 - Q-learning Sarsa 和 DQN 的理解
本文用于基本入门理解. 强化学习的基本理论 : R, S, A 这些就不说了. 先设想两个场景: 一. 1个 5x5 的 格子图, 里面有一个目标点, 2个死亡点二. 一个迷宫, 一个出发点, ...
- 强化学习_Deep Q Learning(DQN)_代码解析
Deep Q Learning 使用gym的CartPole作为环境,使用QDN解决离散动作空间的问题. 一.导入需要的包和定义超参数 import tensorflow as tf import n ...
- 强化学习 车杆游戏 DQN 深度强化学习 Demo
网上搜寻到的代码,亲测比较好用,分享如下. import gym import time env = gym.make('CartPole-v0') # 获得游戏环境 observation = en ...
- 强化学习系列之:Deep Q Network (DQN)
文章目录 [隐藏] 1. 强化学习和深度学习结合 2. Deep Q Network (DQN) 算法 3. 后续发展 3.1 Double DQN 3.2 Prioritized Replay 3. ...
- 强化学习(十四) Actor-Critic
在强化学习(十三) 策略梯度(Policy Gradient)中,我们讲到了基于策略(Policy Based)的强化学习方法的基本思路,并讨论了蒙特卡罗策略梯度reinforce算法.但是由于该算法 ...
随机推荐
- ranker.go
package { start = utils.MinInt(options.OutputOffset, len(outputDocs)) end = ...
- 【Unity游戏开发】AssetBundle杂记--AssetBundle的二三事
一.简介 马三在公司大部分时间做的都是游戏业务逻辑和编辑器工具等相关工作,因此对Unity AssetBundle这块的知识点并不是很熟悉,自己也是有打算想了解并熟悉一下AssetBundle,掌握一 ...
- 关于” 记一次logback传输日志到logstash根据自定义设置动态创建ElasticSearch索引” 这篇博客相关的优化采坑记录
之前写过一篇博客是关于记录日志的简单方式的 主要就是 应用->redis->logstash->elasticsearch 整个流程的配置方法和过程的 虽然我们部分线上应用使用 ...
- poj 3687
Description Windy has N balls of distinct weights from 1 unit to N units. Now he tries to label them ...
- Bot Framework 搭建聊天机器人
这周我来跟大家分享的是在Microsoft Build 2016上发布的微软聊天机器人的框架. 现如今,各种人工智能充斥在我们的生活里.最典型的人工智能产品就是聊天机器人,它既可以陪我们聊天,也可以替 ...
- Jmeter----【Mac电脑】环境配置与打开Jmeter界面
前提条件:打开Jmeter界面,首先需要安装java并配置环境变量. 第一步:下载并安装jdk和环境配置 java jdk下载:http://www.oracle.com/technetwork/ja ...
- socketserver实现并发
socketserver实现并发原理:给每一个前来链接的客户端开启一个线程执行通信.也就是给每一个连接“配备”了一个管家. 下面用一个简单的示例来演示socketserver实现并发(一个服务端,两个 ...
- Word页眉、页码的使用:利用分隔符设置指定页显示页眉,解决页码显示{PAGE \* MERGEFORMAT}问题
不常编辑对文档有格式要求的朋友来说,偶尔需要编辑指定格式页眉页码的word文档时,会一时不记得如何使用,在网上搜索半天,异常烦躁. 特整理一下,记录下来,备不时只需. 以下操作环境为word2016. ...
- C#ComboBox控件“设置 DataSource 属性后无法修改项集合”的解决方法
在使用ComboBox控件时,遇到了重新绑定赋值出问题的情况.正常情况下,对于数据重新赋值的或者绑定数据源的时候,为了防止数据出现问题,都会先清空原来数据,所以就这样写了,但是没有相当恰恰这样写就出现 ...
- Go:学习笔记兼吐槽(1)
Go:学习笔记兼吐槽(1) Go:学习笔记兼吐槽(2) Go:学习笔记兼吐槽(3) 自动添加分号 在很多其他的编程语言中,每一行代码的结尾都必须有分号(假设一行中只有一句代码),Golang 的开 ...