在Ubuntu14.04_ROS_indigo上安装Kinect2驱动和bridge
小乌龟:大乌龟,你这两周干么呢?
大乌龟:在Ubuntu14.04 ROS_indigo上装Kinect2的驱动和bridge
小乌龟:就装个驱动有什么难的
大乌龟:你说的对小乌龟,这确实不是问题,但是,这个步骤错误的了,整个过程就进行不下去了。有时候装别人的东西,就像在使用一个黑盒子,一旦出现了问题,就没有太多的办法。而且自己也很痛苦,浪费了很多时间。下面我就把过程中出现的问题罗列一下,以便后面如果有人遇到的话,就知道是什么问题了。
首先需要说明我装的是什么驱动,还有装的是什么bridge(他的作用是将Kinect2输出的数据装换成ros中的可识别和使用的数据类型):
- Kinect2 开源驱动:libfreenect2
- kinect2--> ros的bridge:iai_kinect2
关于这两个东东的具体说明在他们各自的github中都有详细的介绍, 我在这里主要想说的就是在按照他们各自github进行安装时都出现了什么问题,或者说当你看到terminal给你某种提示的时候你可以知道怎么去应对。
说明:下面的大标题表示我在安装那个包,在标题表示具体执行了什么命令出错了,或者说遇到了什么问题。关于出现的问题我都是用手机拍的照片^_^
1、安装libfreenect2
1.1、sudo apt-get install libgl1-mesa-dri-lts-vivid 出现如下错误:
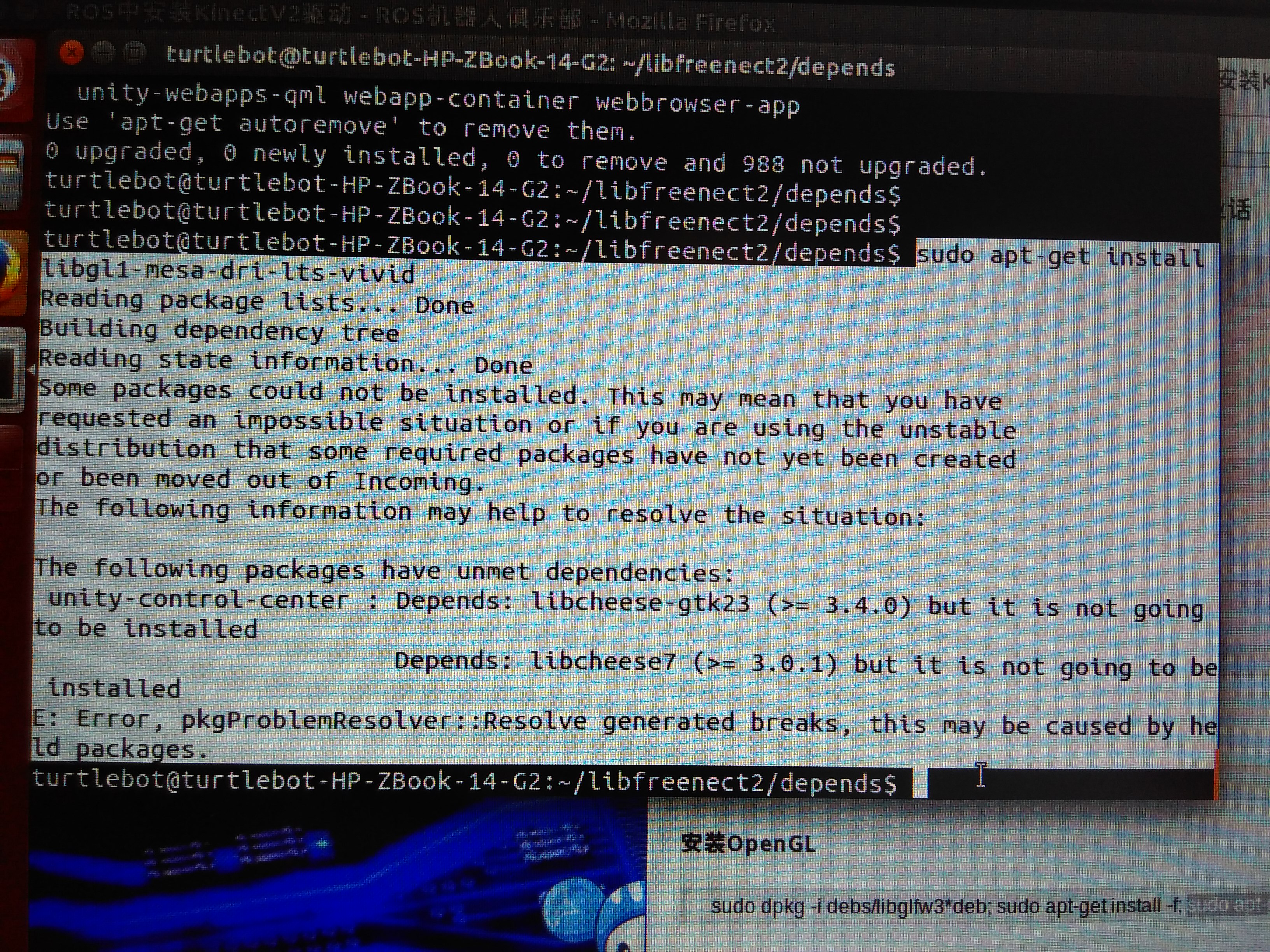
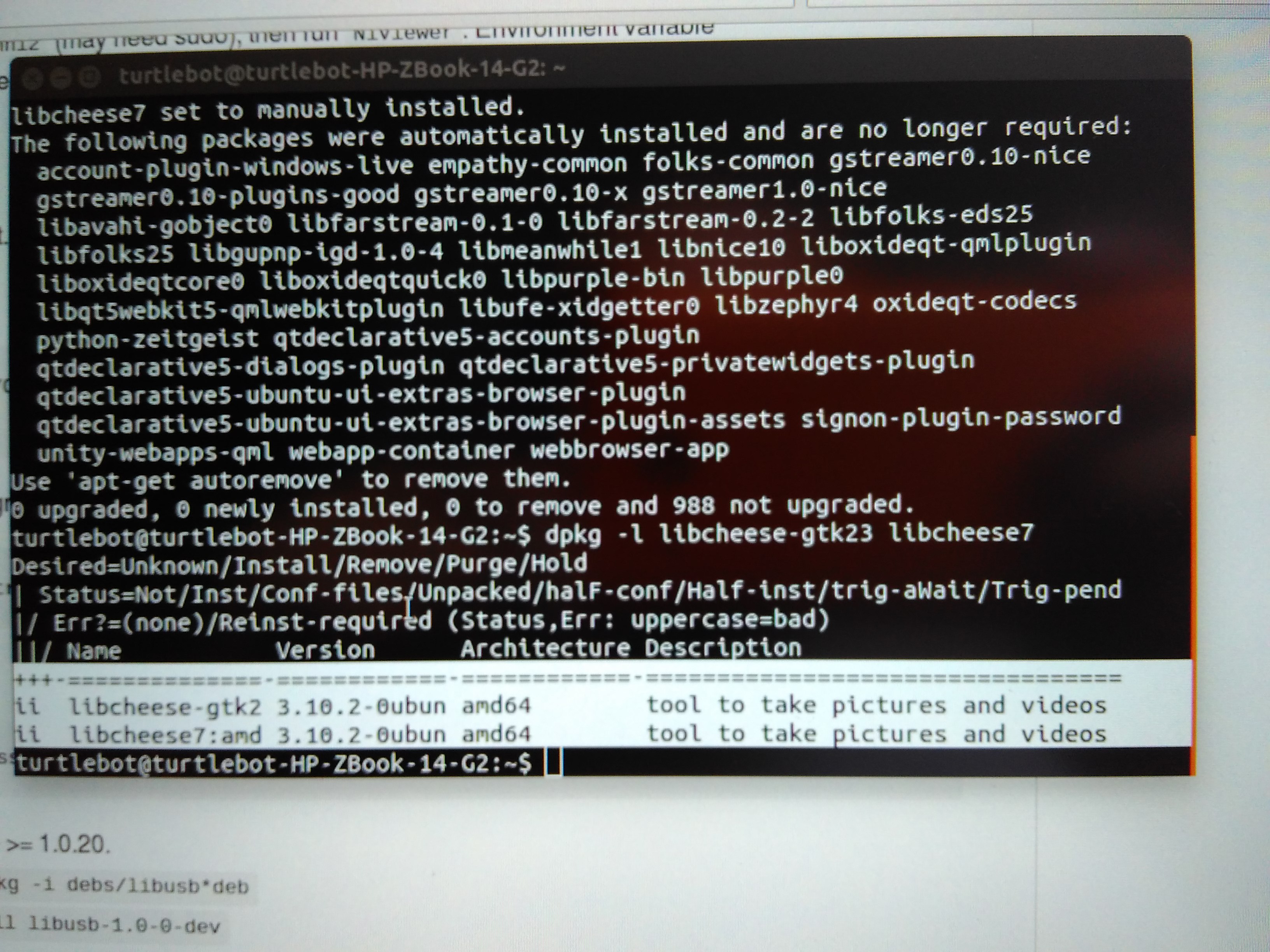
而且我发现这两个依赖项都安装了,如下:
我尝试了很多方法,最终在执行这个命令的时候还是出现同样的问题。最后发现,作者说这个是可以忽略的((Ubuntu 14.04 only) sudo dpkg -i debs/libglfw3*deb; sudo apt-get install -f; sudo apt-get install libgl1-mesa-dri-lts-vivid (If the last command conflicts with other packages, don't do it.))。所以说如果你遇到了这个问题不用担心直接忽略的就可以了,而且这个对最后驱动的使用也没有影响。
1.2、 ./bin/Protonect 出现了如下情况:
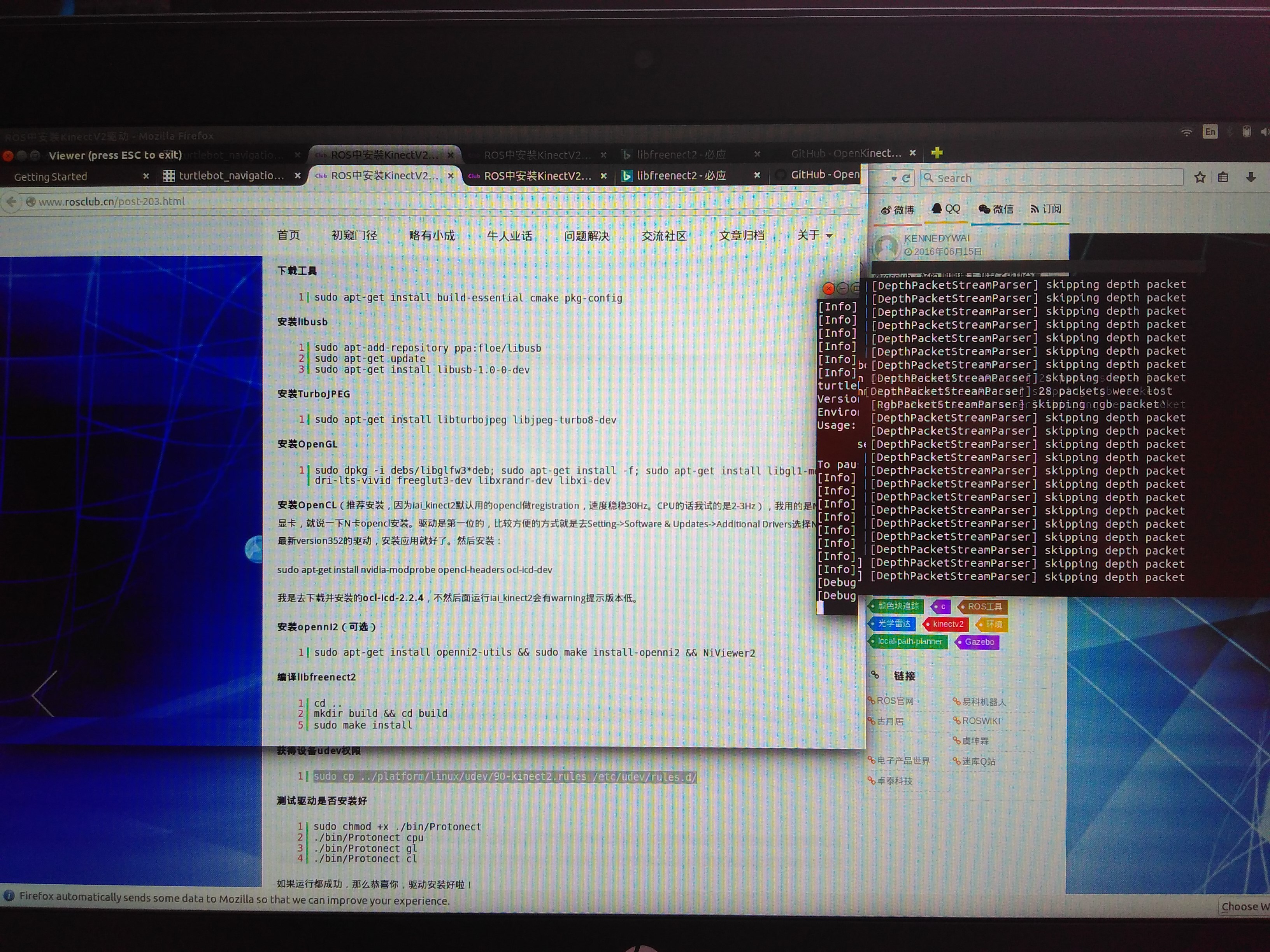
不显示图像,在使用不同的参数时出现的问题一样 —— 不显示图像:
./bin/Protonect cpu
./bin/Protonect gl
./bin/Protonect cl
有时候偶尔又会出现的图像,但是最后这个好像影响不大,我的ros可以正常拿到数据。现在还不知道具体的原因是什么,但是感觉可以忽略。
2、安装iai_kinect2
2.1、rosdep install -r --from-paths . 出现如下问题:
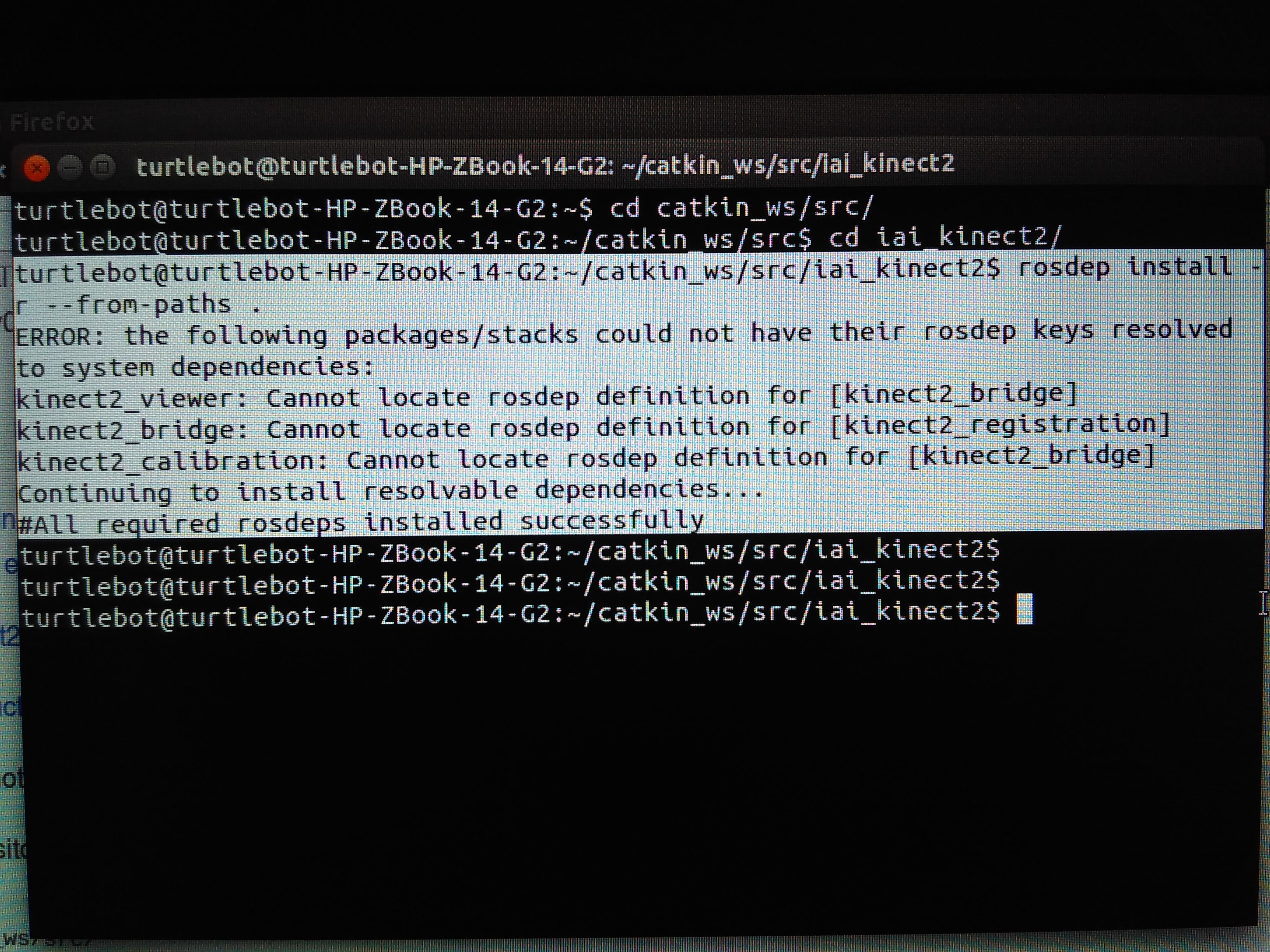
这个问题作者说是可以忽略的。如果你没有rosdep update 在执行这个命令的时候它会提示你应该 sudo rosdep init, 然后terminal提示就会提示你应该rosdep update,但是如果在rosdep update时出现如下错误时就应该检查你的网络是否有问题。

3、在你的台式机上通过ssh访问你机器人上的电脑然后执行“roslaunch kinect2_bridge kinect2_bridge.launch”,可能会出现如下问题。我没有通过ssh,而是在我的机器人上的电脑直接执行这个命令就没有问题了。
4、推荐一本书《ros by example》
ros by example 有很多版本,这是与ros的版本有关系。
ros by example indigo 版本 http://download.csdn.net/detail/a_cainiao_a/9477742
ros by example hydro 版本 http://download.csdn.net/detail/a_cainiao_a/9473183
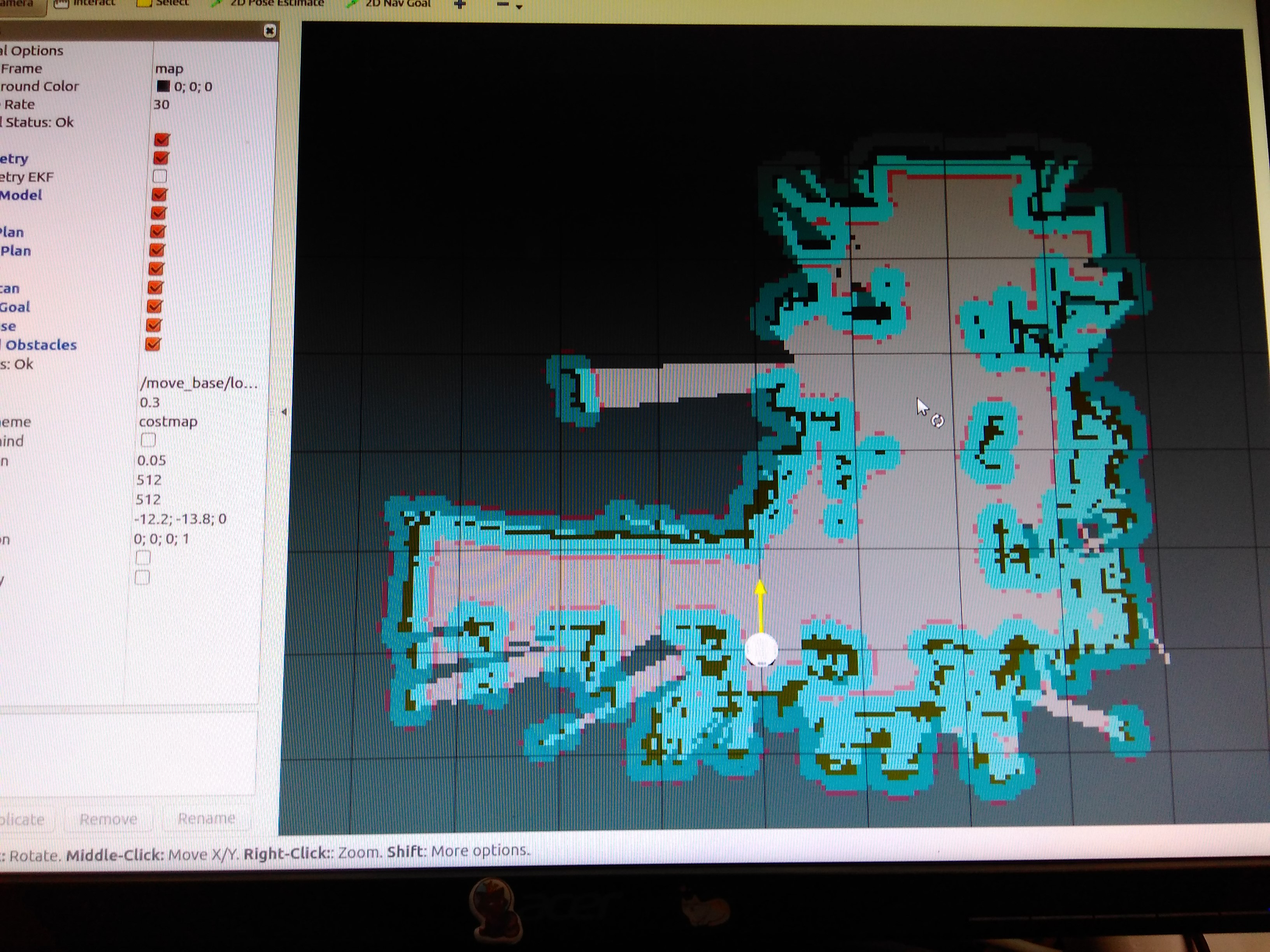
这本书中给我们提供了很多有意思的代码,给大家秀一张用我的TurtleBot绘制的栅格地图:
在Ubuntu14.04_ROS_indigo上安装Kinect2驱动和bridge的更多相关文章
- [异常解决] ubuntu上安装JLink驱动遇到的坑及给后来者的建议
一.前言 最近将整个电脑格式化,改成了linux操作系统 希望这样能让自己在一个新的世界探索技术.提升自己吧- win上的工具用多了,就不想变化了- 继上一篇<ubuntu上安装虚拟机遇到的问题 ...
- [译]How to Install Node.js on Ubuntu 14.04 如何在ubuntu14.04上安装node.js
原文链接为 http://www.hostingadvice.com/how-to/install-nodejs-ubuntu-14-04/ 由作者Jacob Nicholson 发表于October ...
- Ubuntu14.04LTS上安装Pip
pip是一个安装和管理Python包的工具.在Pip的帮助下,你可以安装独特版本的包. 最重要的是,Pip可以通过一个“requirements”的工具来管理一个由包组成的列表和版本号. Pip很像e ...
- 在Ubuntu18.04上安装Nvidia驱动
拿到了一台新机子,带显卡的那种,当然是各种倒腾了!于是我又一天装了三遍机子来进行各种尝试熟悉配置啥的. 所以首先是在裸机上安装Nvidia驱动. 环境:Ubuntu18.04 刚安装完系统,当然是把软 ...
- Ubuntu14.04上安装pip的方法
在Ubuntu14.04上,建议通过下面的方法安装,这是一种通用的方法,也适用于Windows,当然在Windows下 手动下载下来就行了 wget https://bootstrap.pypa.io ...
- Win10 上 安装Arduino 驱动 和 Arduino IDE 1.6.9
Win10 安装Arduino IDE软件 和 驱动 在Win10 上安装最新的Arduino IDE (1.6.9安装包)很简单,并且不行要手动安装Arduino板子的驱动,整个安装过程都当前的简单 ...
- 在Ubuntu14.04上安装WordPress4搭建技术博客
1.安装LAMP环境 1.1 安装Apache2 1.2 安装MySQL5 1.3 安装PHP5 1.4 安装phpMyAdmin 2.初始化数据库 3.下载并配置WordPress 4.配置Apac ...
- AWS ec2的ubuntu14.04上安装git服务
http://imerc.xyz/2015/11/13/Ubuntu-14-04%E4%B8%8AGit%E6%9C%8D%E5%8A%A1%E5%99%A8%E7%9A%84%E6%90%AD%E5 ...
- Caffe初学者第一部:Ubuntu14.04上安装caffe(CPU)+Python的详细过程 (亲测成功, 20180524更新)
前言: 最近在学习深度学习,最先要解决的当然是开源框架的环境安装了.之前一直在学习谷歌的Tensorflow开源框架,最近实验中需要跟别人的算法比较,下载的别人的代码很多都是Caffe的,所以想着搭建 ...
随机推荐
- AngularJS Moudle 函数讲解
AngularJS中的Module类负责定义应用如何启动,它还可以通过声明的方式定义应用中的各个片段.我们来看看它是如何实现这些功能的. 一.Main方法在哪里 如果你是从Java或者Python编程 ...
- UILabel笔记(待完善)
UIlabel的换行由 numberOfLines 属性控制,当为0时,则会自动换到适合的行数: 换行的模式由 lineBreakMode 属性控制: public enum NSLineBreakM ...
- 第一章-第五题(你所在的学校有计算机科学专业和软件工程专业么?相关专业的教学计划和毕业出路有什么不同?阅读有关软件工程和计算机科学的区别的文章,谈谈你的看法。)--By 侯伟婷
我所在的本科学校和研究生学校都有计算机科学专业和软件工程专业.具体的教学计划无从得到,所以此情况无从对比,但是我从本科教务处网站找到了计算机科学专业和软件工程专业有关专业方面的课程,现列表如下. 表格 ...
- javascript 时间格式化
添加扩展 //时间格式化扩展Date.prototype.format = function(format){ var o = { "M+" : this.getMonth()+1 ...
- 3.线性表-cursor
fatal.h #include <stdio.h> #include <stdlib.h> #define Error( Str ) FatalError( Str ) #d ...
- [UIScreen mainScreen].bounds.size.width 和self.view.frame.size.width的区别
self.view.frame.size.width在导航栏titleView计算frame时会出现宽度不准确的情况,布局出现问题,[UIScreen mainScreen].bounds.size. ...
- monkey命令
介绍: monkey是一个命令行工具,可以运行在Android模拟器里或真实设备中.它可以向系统发送伪随机(pseudo-random)的用户事件流(如按键输入.触摸屏输入.手势输入等),可以对待测的 ...
- rabbitmq之back queue草稿
申请队列rabbit_reader在收到消息后处理数据帧时,如果channel id不是0(0代表连接),则认为是channel相关方法. handle_frame(Type, Channel, Pa ...
- 论文笔记(1)——《Where's Wally?Precise User Discovery Attacks in Location Proximity Services》
Abstract: 位置相近服务在社交和移动网络的广泛使用是基于可用性和用户隐私的平衡,但引发了三角定位攻击的风险.文章系统化地讨论了此类攻击的防范,包括问题在不同临近模型下的形式化,针对不同模型的有 ...
- gvim初学命令记录
一.vim进入和退出(在正常模式下进行)若不能保证是否处于正常模式,先按下ESC键不保存退出 :q!(冒号也是键的)保存退出 :wq二.移动 k(上)h(左) l(右) j(下)三.删除(可类似于剪切 ...