ROS文件系统级
ROS的安装就不介绍了,官方教程是最好的:点击打开链接
ROS是机器人操作系统,它应该有自己的工程结构,Linux系统的文件系统如下:

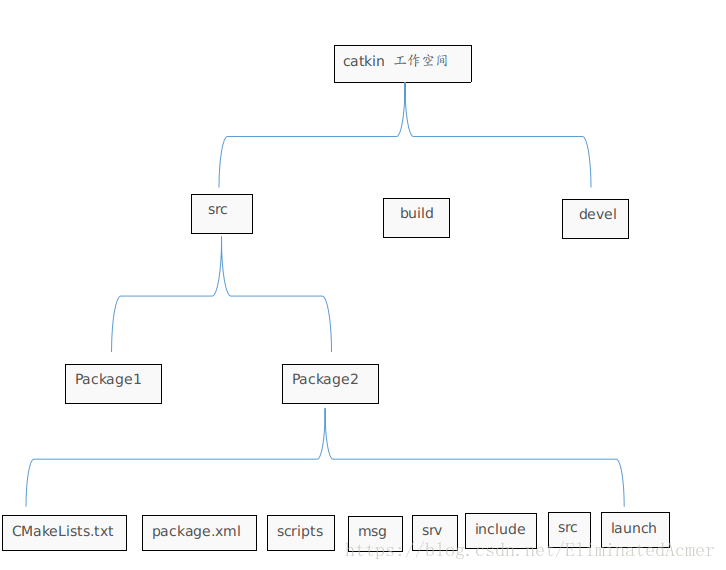
而ROS的文件系统级如下:
接下来逐一介绍它们:
1. catkin 工作空间
工作空间就是管理 ROS 工程和代码的地方,而 catkin 是 ROS 定制的编译构建系统,是对 CMake 的扩展。catkin 工作空间其实就是一个文件夹,用来组织和管理功能包,用 catkin 工具编译。
首先对其进行创建(必须有 src 目录):
mkdir -p ~/catkin_ws/src进入工作空间:
cd ~/catkin_ws/对其进行编译(必须在工作空间进行)
catkin_make如果你的输出像这样:

那就成功了。
这只是完成了编译(编译整个空间),如果要执行某个文件,还需要执行这样一句话:
source ~/catkin_ws/devel/setup.bash刷新环境,这样才不会报错。
2. src,build 和 devel
src 中存放的是 package 源代码,编译完成之后会发现工作空间中多了这两个文件夹,其中 build 中存放的是 cmake 和 catkin 的缓存信息以及中间文件, devel 中存放的则是生成的目标文件,比如头文件,可执行文件,链接库等等。
src 目录下存放着各种各样的功能包,包是 catkin 编译的基本单元。
3.package
又称 功能包,是 ROS 软件的基本组织形式,一个 package 可以包含多个可执行文件(节点),一个最精简的 package,应该如下:

CMakeLists.txt 规定了 catkin 编译的规则,具体写法如下:

package.xml 定义了 package 的属性,例如 包名,版本号,作者等。它的写法如下:

接下来就是将代码放入 package 中,ROS中的代码文件分为 脚本(python,shell) 和 C++(头文件,源文件)。
因此,一般创建 scripts 存放脚本,创建 include 存放 C++ 头文件,src 存放 C++ 源文件。
package 下也可以存放自定义通信格式,分别存放在 srv,msg 和 action 文件夹下。
launch 文件存放在 launch 文件夹下,launch 文件的好处是不用手动编译每一个可执行文件,参数设置文件 yaml 放在 config 文件夹下。
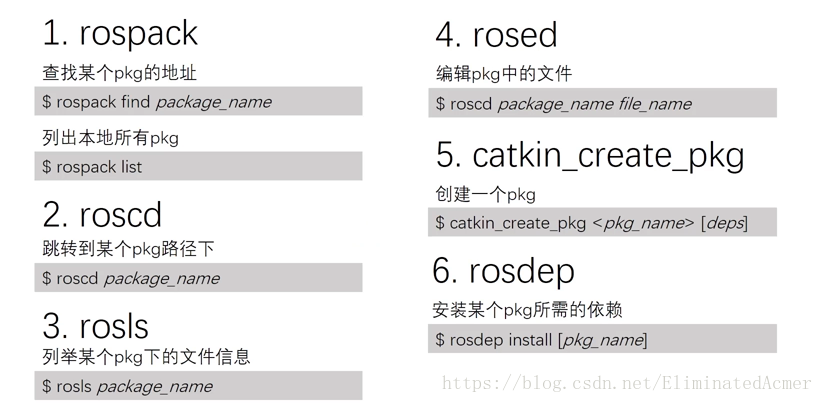
ROS常用命令:
ROS文件系统级的更多相关文章
- ROS学习(三)—— ROS文件系统
一.预备工作 使用ros0tutorials程序包,先下载: sudo apt-get install ros-<distro>-ros-tutorials 其中<distro> ...
- ROS计算图级
上一节说到一个 package 可以包含多个可执行文件(节点),可执行文件需要被运行,就要了解ROS的通信架构,也就是计算图级,例: 小萝卜机器人拥有驱动系统,感知系统,控制系统等,要让它从指定位置到 ...
- 机器人操作系统(ROS)教程4:ROS的框架【转】
转自:http://www.arduino.cn/thread-11351-1-1.html 在进行ROS的代码开发前,有必要了解一些ROS的概念.首先,ROS的系统代码分为两部分:main和univ ...
- Learning ROS for Robotics Programming - Second Edition(《ROS机器人编程学习-第二版》)
Learning ROS for Robotics Programming - Second Edition <ROS机器人编程学习-第二版> ----Your one-stop guid ...
- ROS探索总结(二)——ROS总体框架
个人分类: ROS 所属专栏: ROS探索总结 一. 总体结构 根据ROS系统代码的维护者和分布来标示,主要有两大部分: (1)main:核心部分,主要由Willow G ...
- ROS学习笔记二:ROS系统架构及概念
本文主要是了解ROS的系统架构.文件夹结构以及工作所需的核心文件. ROS系统架构主要被设计和划分为三部分,每一部分代表一个层级的概念:文件系统级(The filesystem level).计算图级 ...
- ROS的文件系统 (二)
ROS的文件系统的基本概念, ROS文件系统中的两个最基本的概念:Package和Manifest,即包和清单文件. Package是组织ROS代码的最基本单位,每一个Package都可以包括库文件, ...
- ROS的文件系统
这篇博客介绍一下ROS的文件系统的基本概念,用户可以直接在官方网站:http://wiki.ros.org/ROS/Tutorials/NavigatingTheFilesystem去查看官方手册. ...
- ROS官网新手级教程总结
第 1 关卡:安装和配置 ROS 环境 目标:在计算机上安装和配置 ROS 环境. 安装 ROS 按照 ROS 安装说明进行安装. 管理环境 确定环境变量 ROS_ROOT 和 ROS_PACKAGE ...
随机推荐
- MySQL 体系结构及存储引擎
MySQL 原理篇 MySQL 索引机制 MySQL 体系结构及存储引擎 MySQL 语句执行过程详解 MySQL 执行计划详解 MySQL InnoDB 缓冲池 MySQL InnoDB 事务 My ...
- CCF 2017-03-1 分蛋糕
CCF 2017-03-1 分蛋糕 题目 问题描述 小明今天生日,他有n块蛋糕要分给朋友们吃,这n块蛋糕(编号为1到n)的重量分别为a1, a2, -, an.小明想分给每个朋友至少重量为k的蛋糕.小 ...
- linux环境weblogic的安装及新建域
环境:inux 64位,jdk 64位, jdk 安装用户应使用weblogic.若使用其他用户安装,须将jdk安装目录整体授权给wblogic用户 安装包:wls1036_dev.zi ...
- WebSocket 的应用
后面用到了再来做整理 链接地址:https://www.cnblogs.com/zhaof/p/9833614.html
- [转]github 上传project代码
原文地址:https://www.cnblogs.com/f1194361820/p/4741558.html 1)将远程仓库纳入管理 其实就是添加远程仓库,在你已有的本地仓库目录下执行如下命令: $ ...
- flutter入门之常见的flutter问题汇总(转)
1. 使用AppBar后如何去掉左边的返回箭头.左边的图标对应的是leading,源代码如下(吐槽一下,CSDN暂不支持dart语言): Widget leading = widget.leading ...
- Linux安全:Linux如何防止木马
(一)解答战略 去企业面试时是有多位竞争者的,因此要注意答题的维度和高度,一定要直接秒杀竞争者,搞定高薪offer. (二)解答战术 因为Linux下的木马常常是恶意者通过Web的上传目录的方式来上传 ...
- RMAN恢复数据文件
实验之前先备份数据库 RMAN>backup database; 在操作系统中删除数据文件 5 SQL> startup ORACLE 例程已经启动. Total System Globa ...
- Gitlab-CI +Docker + Docker-Compose构建可持续集成java项目的镜像
先注册好Runner: https://www.cnblogs.com/zsifan/p/11714788.html 以及搭建Java和Maven环境: https://www.cnblogs.com ...
- Spring Boot配置多数据源并实现Druid自动切换
原文:https://blog.csdn.net/acquaintanceship/article/details/75350653 Spring Boot配置多数据源配置yml文件主数据源配置从数据 ...