POJ1573(Robot Motion)--简单模拟+简单dfs
题意
: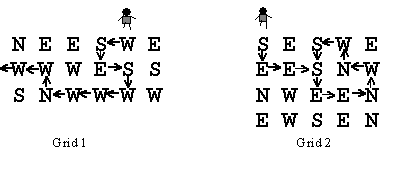
问你按照图中所给的提示走,多少步能走出来???
其实只要根据这个提示走下去就行了。模拟每一步就OK,因为下一步的操作和上一步一样,所以简单dfs。如果出现loop状态,只要记忆每个所到的点的第一次的步数,最后总步数减掉它即可
/*************************************************************************
> File Name: poj1573.cpp
> Author: YeGuoSheng
> Description:
给一个开始位置和一个标记了每个走向的迷宫,问能不能按照每一步的
提示走出迷宫
> Created Time: 2019年07月23日 星期二 17时27分34秒
************************************************************************/ #include<iostream>
#include<stdio.h>
#include<cstring>
#include<cmath>
#include<vector>
#include<stack>
#include<map>
#include<set>
#include<list>
#include<queue>
#include<string>
#include<algorithm>
#include<iomanip>
using namespace std;
const int maxn = ;
char g[maxn][maxn];
int vis[maxn][maxn];
int gCount[maxn][maxn];//标记所访问到的点是第几步访问到的
int row,col,start;
int Count = ;
int t = ;
bool flag = false;//标记是否走出来或死虚幻
int p;//记录上一次到达某位置的步数,防止被第二次到达的步数所覆盖 void dfs2(int x,int y,int Count)
{
if(x== && y == start)//回到起始位置结束dfs
{
return ;
}
} void dfs(int x,int y,int Count)
{
t = Count;//记录到总步数
p = gCount[x][y];//提前保存第一次某点到达的步数
gCount[x][y] = t;//更新到当前访问到点的总步数
if(x== ||y== || x == row+ || y == col+)//走出去的情况
{
flag = true;
return;
}
if(vis[x][y] == )//如果当前结点未访问
{
vis[x][y] = ;//标记为1,,然后进行下面的dfs
}
else // 1当前位置已经访问过,即接下来将构成死循环
{
flag = false;
return ;
}
if(g[x][y] == 'W')//dfs下一个位置
{
dfs(x,y-,Count+);
return ;
}
else if(g[x][y]=='E')
{
dfs(x,y+,Count+);
return ;
}
else if (g[x][y] =='S')
{
dfs(x+,y,Count+);
return;
}
else//N
{
dfs(x-,y,Count+);
return ;
}
} int main()
{
while(scanf("%d%d%d",&row,&col,&start) && row != && col != && start != )
{
Count=;
p = ;
t = ;
memset(g,'.',sizeof(g));//边界用‘.’填充
memset(vis,,sizeof(vis));
for(int i = ;i <= row;i++)//整个Grid加了边界
{
for(int j = ;j <= col;j++)
{
cin>>g[i][j];
}
}
dfs(,start,);
if(flag)
{
// for(int i = 1;i <= row;i++)
// {
// for(int j= 1;j <= col;j++)
// {
// cout<<gCount[i][j]<<" ";
// }
// cout<<endl;
// }
cout<<t<<" step(s) to exit"<<endl;
}
else
{
cout<<p<<" step(s) before a loop of "<<t-p<<" step(s)"<<endl;
}
}
return ;
}
POJ1573(Robot Motion)--简单模拟+简单dfs的更多相关文章
- poj1573 Robot Motion
Robot Motion Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 12507 Accepted: 6070 Des ...
- POJ1573——Robot Motion
Robot Motion Description A robot has been programmed to follow the instructions in its path. Instruc ...
- poj 1573 Robot Motion【模拟题 写个while循环一直到机器人跳出来】
...
- POJ 1573 Robot Motion(模拟)
题目代号:POJ 1573 题目链接:http://poj.org/problem?id=1573 Language: Default Robot Motion Time Limit: 1000MS ...
- POJ1573 Robot Motion(模拟)
题目链接. 分析: 很简单的一道题, #include <iostream> #include <cstring> #include <cstdio> #inclu ...
- poj1573&&hdu1035 Robot Motion(模拟)
转载请注明出处:http://blog.csdn.net/u012860063? viewmode=contents 题目链接: HDU:pid=1035">http://acm.hd ...
- POJ-1573 Robot Motion模拟
题目链接: https://vjudge.net/problem/POJ-1573 题目大意: 有一个N*M的区域,机器人从第一行的第几列进入,该区域全部由'N' , 'S' , 'W' , 'E' ...
- poj1573 Robot Motion(DFS)
题目链接 http://poj.org/problem?id=1573 题意 一个机器人在给定的迷宫中行走,在迷宫中的特定位置只能按照特定的方向行走,有两种情况:①机器人按照方向序列走出迷宫,这时输出 ...
- hdu 1035 Robot Motion(模拟)
Problem Description A robot has been programmed to follow the instructions in its path. Instructions ...
随机推荐
- pyqt5界面
用pyqt5做了一个小程序,保留一下这个固定格式: import sys from PyQt5 import uic, QtGui from PyQt5.QtGui import QWindow fr ...
- leetcode 542. 01 Matrix 、663. Walls and Gates(lintcode) 、773. Sliding Puzzle 、803. Shortest Distance from All Buildings
542. 01 Matrix https://www.cnblogs.com/grandyang/p/6602288.html 将所有的1置为INT_MAX,然后用所有的0去更新原本位置为1的值. 最 ...
- 下周文件ie 谷歌兼容性处理
https://blog.csdn.net/u014628388/article/details/81738704 问题描述window.URL.createObjectURL()可以直接生成blob ...
- flutter Switch组件 On/off 用于切换一个单一状态
import 'package:flutter/material.dart'; class SwitchDemo extends StatefulWidget { @override _SwitchD ...
- Js/jQuery实时监听input输入框值变化
前言在做web开发时候很多时候都需要即时监听输入框值的变化,以便作出即时动作去引导浏览者增强网站的用户体验感.而采用onchange时间又往往是在输入框失去焦点(onblur)时候触发,有时候并不能满 ...
- 算法习题---4-9数据挖掘(Uva1591)
一:题目 这是最懵逼的一道题,什么鬼......... [刷题]算法竞赛入门经典(第2版) 4-9/UVa1591 - Data Mining(详细题目看这个吧,不想多说) 二:代码实现 #defin ...
- [整理]Python程序员面试前需要看的博客(持续整理)
基本素养 如何聪明的提问 面试方法 从面试官角度来告诉大家,哪些人能面试成功 如何在面试中介绍自己的项目经验 计算机系统 [面试] 迄今为止把同步/异步/阻塞/非阻塞/BIO/NIO/AIO讲的这么清 ...
- Qt编写气体安全管理系统23-类型设置
一.前言 类型设置这个功能模块大大拓展了整个系统的灵活性,将整个系统中所有用到的控制器型号.探测器数量.探测器型号.气体种类.气体符号都存储到数据库表中,用户在类型设置中可以自由添加删除和修改,这样后 ...
- Qt编写气体安全管理系统20-控制器管理
一.前言 控制器管理,主要就是对控制器进行添加删除和修改,其中包括编号.端口名称.控制器名称.控制器地址.控制器型号.探测器数量这几个字段,端口名称表示当前控制器所属哪个端口,一个系统中可以有好多个端 ...
- 宣化上人:大佛顶首楞严经四种清净明诲浅释(10-11) -------------------------------------------------------------------------------- (转自学佛网:http://www.xuefo.net/nr/article23/230920.html)
大佛顶首楞严经四种清净明诲浅释(10) 唐天竺·沙门般剌密帝译 宣化上人主讲 一九八三年四月十七日晚讲于万佛圣城 是故阿难.若不断偷修禅定者.譬如有人.水灌漏卮.欲求其满.纵经尘劫.终无平复. 是故阿 ...