R-CNN/Fast R-CNN/Faster R-CNN
一、R-CNN 横空出世
R-CNN(Region CNN,区域卷积神经网络)可以说是利用深度学习进行目标检测的开山之作,作者Ross Girshick多次在PASCAL VOC的目标检测竞赛中折桂,2010年更是带领团队获得了终身成就奖,如今就职于Facebook的人工智能实验室(FAIR)。
R-CNN算法的流程如下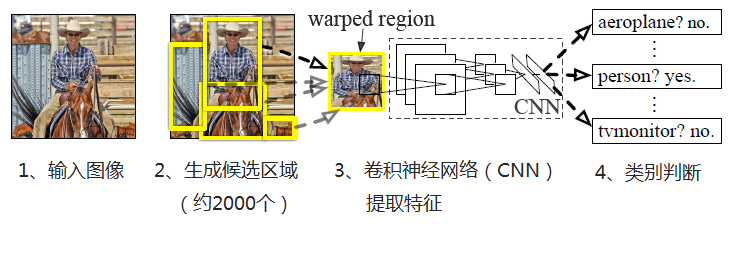
1、输入图像
2、每张图像生成1K~2K个候选区域
3、对每个候选区域,使用深度网络提取特征(AlextNet、VGG等CNN都可以)
4、将特征送入每一类的SVM 分类器,判别是否属于该类
5、使用回归器精细修正候选框位置
下面展开进行介绍
1、生成候选区域
使用Selective Search(选择性搜索)方法对一张图像生成约2000-3000个候选区域,基本思路如下:
(1)使用一种过分割手段,将图像分割成小区域
(2)查看现有小区域,合并可能性最高的两个区域,重复直到整张图像合并成一个区域位置。优先合并以下区域:
- 颜色(颜色直方图)相近的
- 纹理(梯度直方图)相近的
- 合并后总面积小的
- 合并后,总面积在其BBOX中所占比例大的
在合并时须保证合并操作的尺度较为均匀,避免一个大区域陆续“吃掉”其它小区域,保证合并后形状规则。
(3)输出所有曾经存在过的区域,即所谓候选区域
2、特征提取
使用深度网络提取特征之前,首先把候选区域归一化成同一尺寸227×227。
使用CNN模型进行训练,例如AlexNet,一般会略作简化,如下图: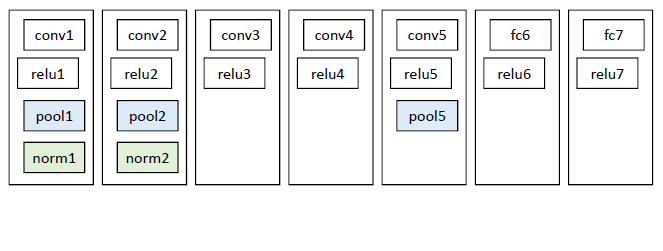
3、类别判断
对每一类目标,使用一个线性SVM二类分类器进行判别。输入为深度网络(如上图的AlexNet)输出的4096维特征,输出是否属于此类。
4、位置精修
目标检测的衡量标准是重叠面积:许多看似准确的检测结果,往往因为候选框不够准确,重叠面积很小,故需要一个位置精修步骤,对于每一个类,训练一个线性回归模型去判定这个框是否框得完美,如下图: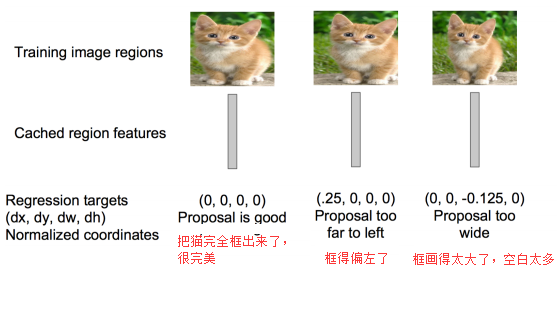
R-CNN将深度学习引入检测领域后,一举将PASCAL VOC上的检测率从35.1%提升到53.7%。
二、Fast R-CNN大幅提速
继2014年的R-CNN推出之后,Ross Girshick在2015年推出Fast R-CNN,构思精巧,流程更为紧凑,大幅提升了目标检测的速度。
Fast R-CNN和R-CNN相比,训练时间从84小时减少到9.5小时,测试时间从47秒减少到0.32秒,并且在PASCAL VOC 2007上测试的准确率相差无几,约在66%-67%之间。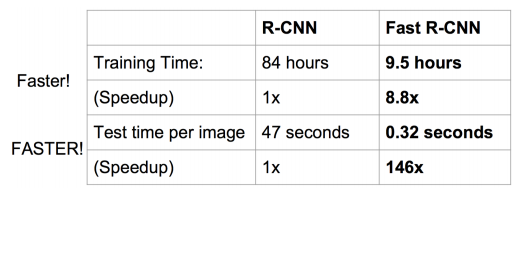
Fast R-CNN主要解决R-CNN的以下问题:
1、训练、测试时速度慢
R-CNN的一张图像内候选框之间存在大量重叠,提取特征操作冗余。而Fast R-CNN将整张图像归一化后直接送入深度网络,紧接着送入从这幅图像上提取出的候选区域。这些候选区域的前几层特征不需要再重复计算。
2、训练所需空间大
R-CNN中独立的分类器和回归器需要大量特征作为训练样本。Fast R-CNN把类别判断和位置精调统一用深度网络实现,不再需要额外存储。
下面进行详细介绍
1、在特征提取阶段,通过CNN(如AlexNet)中的conv、pooling、relu等操作都不需要固定大小尺寸的输入,因此,在原始图片上执行这些操作后,输入图片尺寸不同将会导致得到的feature map(特征图)尺寸也不同,这样就不能直接接到一个全连接层进行分类。
在Fast R-CNN中,作者提出了一个叫做ROI Pooling的网络层,这个网络层可以把不同大小的输入映射到一个固定尺度的特征向量。ROI Pooling层将每个候选区域均匀分成M×N块,对每块进行max pooling。将特征图上大小不一的候选区域转变为大小统一的数据,送入下一层。这样虽然输入的图片尺寸不同,得到的feature map(特征图)尺寸也不同,但是可以加入这个神奇的ROI Pooling层,对每个region都提取一个固定维度的特征表示,就可再通过正常的softmax进行类型识别。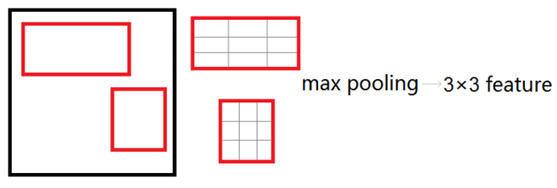
2、在分类回归阶段,在R-CNN中,先生成候选框,然后再通过CNN提取特征,之后再用SVM分类,最后再做回归得到具体位置(bbox regression)。而在Fast R-CNN中,作者巧妙的把最后的bbox regression也放进了神经网络内部,与区域分类合并成为了一个multi-task模型,如下图所示: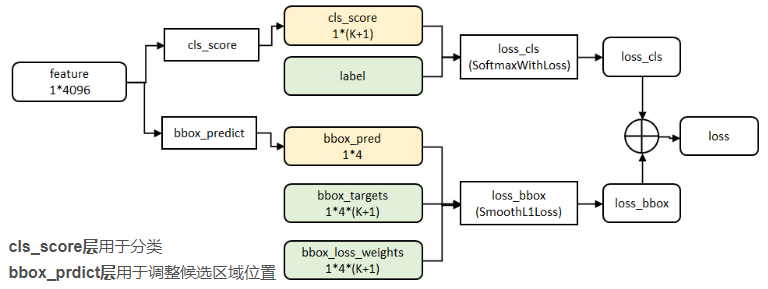
实验表明,这两个任务能够共享卷积特征,并且相互促进。
Fast R-CNN很重要的一个贡献是成功地让人们看到了Region Proposal+CNN(候选区域+卷积神经网络)这一框架实时检测的希望,原来多类检测真的可以在保证准确率的同时提升处理速度。
三、Faster R-CNN更快更强
继2014年推出R-CNN,2015年推出Fast R-CNN之后,目标检测界的领军人物Ross Girshick团队在2015年又推出一力作:Faster R-CNN,使简单网络目标检测速度达到17fps,在PASCAL VOC上准确率为59.9%,复杂网络达到5fps,准确率78.8%。
在Fast R-CNN还存在着瓶颈问题:Selective Search(选择性搜索)。要找出所有的候选框,这个也非常耗时。那我们有没有一个更加高效的方法来求出这些候选框呢?
在Faster R-CNN中加入一个提取边缘的神经网络,也就说找候选框的工作也交给神经网络来做了。这样,目标检测的四个基本步骤(候选区域生成,特征提取,分类,位置精修)终于被统一到一个深度网络框架之内。如下图所示: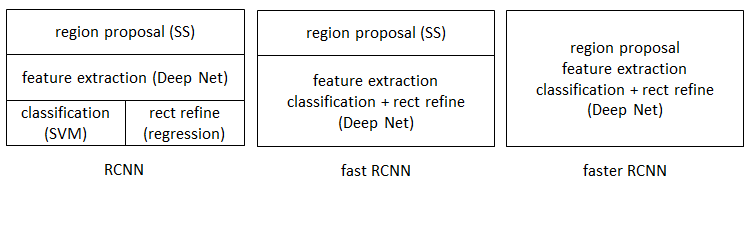
Faster R-CNN可以简单地看成是“区域生成网络+Fast R-CNN”的模型,用区域生成网络(Region Proposal Network,简称RPN)来代替Fast R-CNN中的Selective Search(选择性搜索)方法。
如下图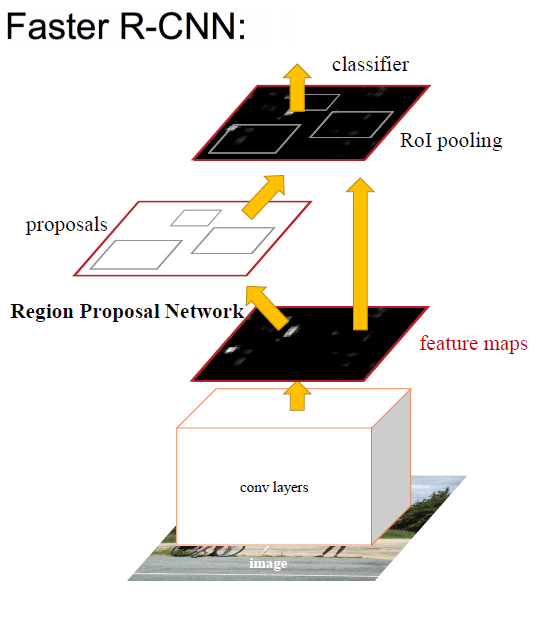
RPN如下图: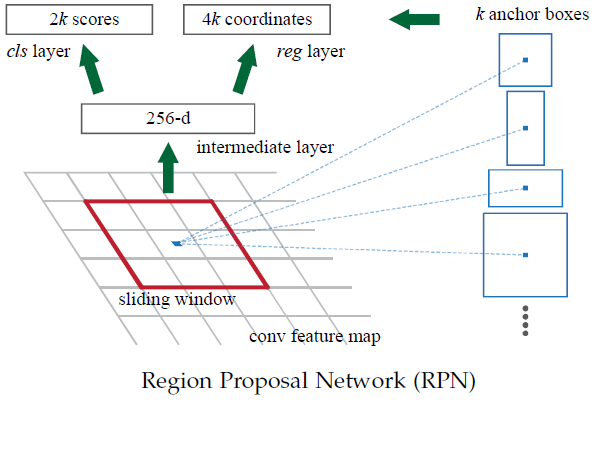
RPN的工作步骤如下:
- 在feature map(特征图)上滑动窗口
- 建一个神经网络用于物体分类+框位置的回归
- 滑动窗口的位置提供了物体的大体位置信息
- 框的回归提供了框更精确的位置
Faster R-CNN设计了提取候选区域的网络RPN,代替了费时的Selective Search(选择性搜索),使得检测速度大幅提升,下表对比了R-CNN、Fast R-CNN、Faster R-CNN的检测速度: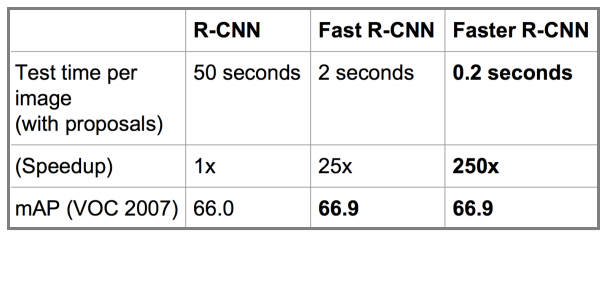
总结
R-CNN、Fast R-CNN、Faster R-CNN一路走来,基于深度学习目标检测的流程变得越来越精简、精度越来越高、速度也越来越快。基于region proposal(候选区域)的R-CNN系列目标检测方法是目标检测技术领域中的最主要分支之一。
R-CNN/Fast R-CNN/Faster R-CNN的更多相关文章
- CNN结构:用于检测的CNN结构进化-一站式方法
有兴趣查看原文:YOLO详解 人眼能够快速的检测和识别视野内的物体,基于Maar的视觉理论,视觉先识别出局部显著性的区块比如边缘和角点,然后综合这些信息完成整体描述,人眼逆向工程最相像的是DPM模型. ...
- CNN结构:用于检测的CNN结构进化-分离式方法
前言: 原文链接:基于CNN的目标检测发展过程 文章有大量修改,如有不适,请移步原文. 参考文章:图像的全局特征--用于目标检测 目标的检测和定位中一个很困难的问题是,如何从数以万计的候选 ...
- findViewById(R.id.btn_first) 给写成 R.layout.
窗体内放了个按钮, findViewById(R.id.btn_first) 给写成 R.layout. 在java 里边引用结果就是找不到那个id 找了半天找不到原因, 奔着网上常见R找不到的问题, ...
- 2017-5-14 湘潭市赛 Partial Sum 给n个数,每次操作选择一个L,一个R,表示区间左右端点,该操作产生的贡献为[L+1,R]的和的绝对值-C。 0<=L<R<=n; 如果选过L,R这两个位置,那么以后选择的L,R都不可以再选择这两个位置。最多操作m次,求可以获得的 最大贡献和。
Partial Sum Accepted : Submit : Time Limit : MS Memory Limit : KB Partial Sum Bobo has a integer seq ...
- CF 给你三个数字L, R, K,问在[L, R]范围内有多少个数字满足它每一位不同数字不超过k个,求出它们的和(数位DP)
题意: 给你三个数字L, R, K,问在[L, R]范围内有多少个数字满足它每一位不同数字不超过k个,求出它们的和 分析:考虑用状态压缩 , 10给位0~9 , 如果之前出现过了某个数字x ,那就拿当 ...
- R语言入门1:安装R和RStudio
R语言入门1:安装R和RStudio 曹务强 中科院遗传学博士研究生 9 人赞同了该文章 1. Windows安装R 在Windows系统上,安装R语言比较简单,直接从R的官方网站下载,按照正常的软件 ...
- R语言 我要如何开始R语言_数据分析师
R语言 我要如何开始R语言_数据分析师 我要如何开始R语言? 很多时候,我们的老板跟我们说,这个东西你用R语言去算吧,Oh,My god!什么是R语言?我要怎么开始呢? 其实回答这个问题很简单,首先, ...
- 论文笔记:目标检测算法(R-CNN,Fast R-CNN,Faster R-CNN,FPN,YOLOv1-v3)
R-CNN(Region-based CNN) motivation:之前的视觉任务大多数考虑使用SIFT和HOG特征,而近年来CNN和ImageNet的出现使得图像分类问题取得重大突破,那么这方面的 ...
- 机器学习: R-CNN, Fast R-CNN and Faster R-CNN
做语义分割的大概都知道这几篇文章了,将一个传统的计算机视觉模型,用CNN一点一点的替换,直到最后构建了一个完整的基于CNN的端到端的模型.这几篇文章有一定的连贯性.从中可以看到一种研究的趋势走向. 上 ...
- 深度学习笔记之目标检测算法系列(包括RCNN、Fast RCNN、Faster RCNN和SSD)
不多说,直接上干货! 本文一系列目标检测算法:RCNN, Fast RCNN, Faster RCNN代表当下目标检测的前沿水平,在github都给出了基于Caffe的源码. • RCNN RCN ...
随机推荐
- vue——store全局存储
业务场景:刷新页面时,首次拉取所有配置,存储到store状态管理用于全局调用: import Vue from 'vue' import Vuex from 'vuex' import userInf ...
- Windows10系统里安装SCons
1. 安装python2.7 执行python2.x的安装包程序python-2.7.12.amd64.msi进行安装即可 2. 安装scons 下载scons-2.5.0.zip压缩包并解压缩 CM ...
- 10 Windows编程——鼠标消息
和鼠标相关的三个属于:click,double-click,drag 鼠标消息和键盘消息不同:只要鼠标跨越某个窗口,或者在某个窗口中按键,消息. 客户去鼠标消息 WM_MOUSEMOVE WM_[L, ...
- 详解es6中Proxy代理对象的作用
在es6中新添加了Proxy,那么它有什么作用啊?Proxy本意为代理,而es6中的Proxy也就是代理对象,那么代理对象感觉听起来很模糊,在这里就解释一下Proxy代理对象的作用. Proxy的主要 ...
- python基础认识
Python基础 一. 简介 Python是著名的“龟叔”Guido van Rossum在1989年圣诞节期间,为了打发无聊的圣诞节而编写的一个编程语言.豆瓣,Google.Yahoo等,甚至 ...
- POJ-3186-Treats for the Cows(记忆化搜索)
链接: https://vjudge.net/problem/POJ-3186 题意: FJ has purchased N (1 <= N <= 2000) yummy treats f ...
- P1169 [ZJOI2007]棋盘制作 悬线法or单调栈
思路:悬线法\(or\)单调栈 提交:2次 错因:正方形面积取错了\(QwQ\) 题解: 悬线法 讲解:王知昆\(dalao\)的\(PPT\) 详见代码: #include<cstdio> ...
- 7zip使用相关
造冰箱的大熊猫@cnblogs 2019/11/2 1.仅存储不压缩 7z a -mx0 compressed.7z FileFolderPath 将FileFolderPath指向的文件或文件夹打包 ...
- gitlab高可用模式
高可用模式 企业版 社区版 我们这里说一下成本比较低的主备模式,它主要依赖的是DRBD方式进行数据同步,需要2台ALL IN ONE的GitLab服务器,也就是通过上面安装方式把所有组件都安装在一起的 ...
- iOS测试-如何指标量化app耗电量和性能XCTest Metrics
对于app端的专项测试,Android端我们可以用adb或者一些三方工具进行(例如itest)进行实时的性能监控,iOS端的话也可以用用一些三方的工具,但是需要嵌入到我们的项目当中,今天来介绍下Xco ...