吴裕雄 PYTHON 人工智能——基于MASK_RCNN目标检测(4)
import os
import sys
import random
import math
import re
import time
import numpy as np
import tensorflow as tf
import matplotlib
import matplotlib.pyplot as plt
import matplotlib.patches as patches import utils
import visualize
from visualize import display_images
import model as modellib
from model import log %matplotlib inline # Root directory of the project
ROOT_DIR = os.getcwd() # Directory to save logs and trained model
MODEL_DIR = os.path.join(ROOT_DIR, "logs") # Local path to trained weights file
COCO_MODEL_PATH = os.path.join(ROOT_DIR, "mask_rcnn_coco.h5")
# Download COCO trained weights from Releases if needed
if not os.path.exists(COCO_MODEL_PATH):
utils.download_trained_weights(COCO_MODEL_PATH) # Path to Shapes trained weights
SHAPES_MODEL_PATH = os.path.join(ROOT_DIR, "mask_rcnn_shapes.h5")
# Run one of the code blocks # Shapes toy dataset
# import shapes
# config = shapes.ShapesConfig() # MS COCO Dataset
import coco
config = coco.CocoConfig()
COCO_DIR = "path to COCO dataset" # TODO: enter value here
# Override the training configurations with a few
# changes for inferencing.
class InferenceConfig(config.__class__):
# Run detection on one image at a time
GPU_COUNT = 1
IMAGES_PER_GPU = 1 config = InferenceConfig()
config.display()
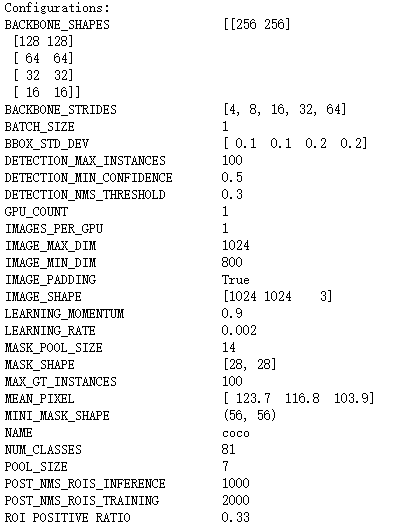
# Device to load the neural network on.
# Useful if you're training a model on the same
# machine, in which case use CPU and leave the
# GPU for training.
DEVICE = "/cpu:0" # /cpu:0 or /gpu:0 # Inspect the model in training or inference modes
# values: 'inference' or 'training'
# TODO: code for 'training' test mode not ready yet
TEST_MODE = "inference"
def get_ax(rows=1, cols=1, size=16):
"""Return a Matplotlib Axes array to be used in
all visualizations in the notebook. Provide a
central point to control graph sizes. Adjust the size attribute to control how big to render images
"""
_, ax = plt.subplots(rows, cols, figsize=(size*cols, size*rows))
return ax
# Build validation dataset
if config.NAME == 'shapes':
dataset = shapes.ShapesDataset()
dataset.load_shapes(500, config.IMAGE_SHAPE[0], config.IMAGE_SHAPE[1])
elif config.NAME == "coco":
dataset = coco.CocoDataset()
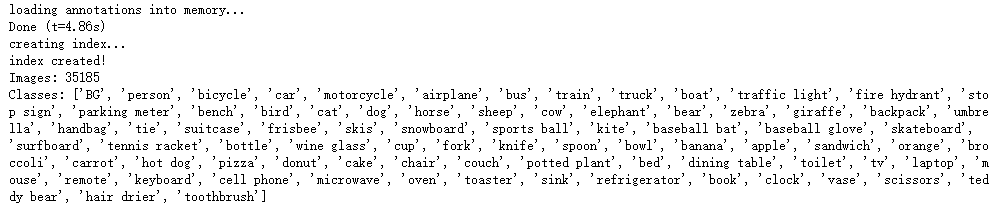
dataset.load_coco(COCO_DIR, "minival") # Must call before using the dataset
dataset.prepare() print("Images: {}\nClasses: {}".format(len(dataset.image_ids), dataset.class_names))
# Create model in inference mode
with tf.device(DEVICE):
model = modellib.MaskRCNN(mode="inference", model_dir=MODEL_DIR,
config=config) # Set weights file path
if config.NAME == "shapes":
weights_path = SHAPES_MODEL_PATH
elif config.NAME == "coco":
weights_path = COCO_MODEL_PATH
# Or, uncomment to load the last model you trained
# weights_path = model.find_last()[1] # Load weights
print("Loading weights ", weights_path)
model.load_weights(weights_path, by_name=True)
image_id = random.choice(dataset.image_ids)
image, image_meta, gt_class_id, gt_bbox, gt_mask =\
modellib.load_image_gt(dataset, config, image_id, use_mini_mask=False)
info = dataset.image_info[image_id]
print("image ID: {}.{} ({}) {}".format(info["source"], info["id"], image_id,
dataset.image_reference(image_id)))
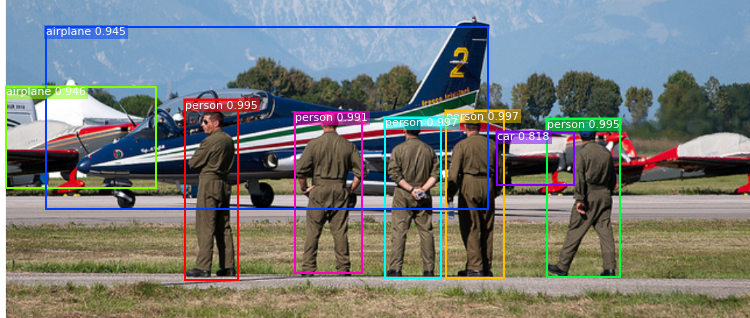
# Run object detection
results = model.detect([image], verbose=1) # Display results
ax = get_ax(1)
r = results[0]
visualize.display_instances(image, r['rois'], r['masks'], r['class_ids'],
dataset.class_names, r['scores'], ax=ax,
title="Predictions")
log("gt_class_id", gt_class_id)
log("gt_bbox", gt_bbox)
log("gt_mask", gt_mask)

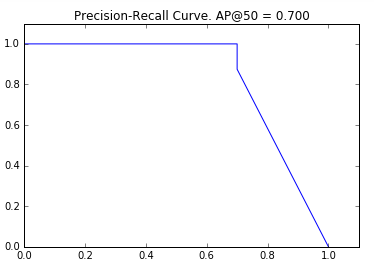
# Draw precision-recall curve
AP, precisions, recalls, overlaps = utils.compute_ap(gt_bbox, gt_class_id, gt_mask,
r['rois'], r['class_ids'], r['scores'], r['masks'])
visualize.plot_precision_recall(AP, precisions, recalls)
# Grid of ground truth objects and their predictions
visualize.plot_overlaps(gt_class_id, r['class_ids'], r['scores'],
overlaps, dataset.class_names)

# Compute VOC-style Average Precision
def compute_batch_ap(image_ids):
APs = []
for image_id in image_ids:
# Load image
image, image_meta, gt_class_id, gt_bbox, gt_mask =\
modellib.load_image_gt(dataset, config,
image_id, use_mini_mask=False)
# Run object detection
results = model.detect([image], verbose=0)
# Compute AP
r = results[0]
AP, precisions, recalls, overlaps =\
utils.compute_ap(gt_bbox, gt_class_id, gt_mask,
r['rois'], r['class_ids'], r['scores'], r['masks'])
APs.append(AP)
return APs # Pick a set of random images
image_ids = np.random.choice(dataset.image_ids, 10)
APs = compute_batch_ap(image_ids)
print("mAP @ IoU=50: ", np.mean(APs))

# Generate RPN trainig targets
# target_rpn_match is 1 for positive anchors, -1 for negative anchors
# and 0 for neutral anchors.
target_rpn_match, target_rpn_bbox = modellib.build_rpn_targets(
image.shape, model.anchors, gt_class_id, gt_bbox, model.config)
log("target_rpn_match", target_rpn_match)
log("target_rpn_bbox", target_rpn_bbox) positive_anchor_ix = np.where(target_rpn_match[:] == 1)[0]
negative_anchor_ix = np.where(target_rpn_match[:] == -1)[0]
neutral_anchor_ix = np.where(target_rpn_match[:] == 0)[0]
positive_anchors = model.anchors[positive_anchor_ix]
negative_anchors = model.anchors[negative_anchor_ix]
neutral_anchors = model.anchors[neutral_anchor_ix]
log("positive_anchors", positive_anchors)
log("negative_anchors", negative_anchors)
log("neutral anchors", neutral_anchors) # Apply refinement deltas to positive anchors
refined_anchors = utils.apply_box_deltas(
positive_anchors,
target_rpn_bbox[:positive_anchors.shape[0]] * model.config.RPN_BBOX_STD_DEV)
log("refined_anchors", refined_anchors, )

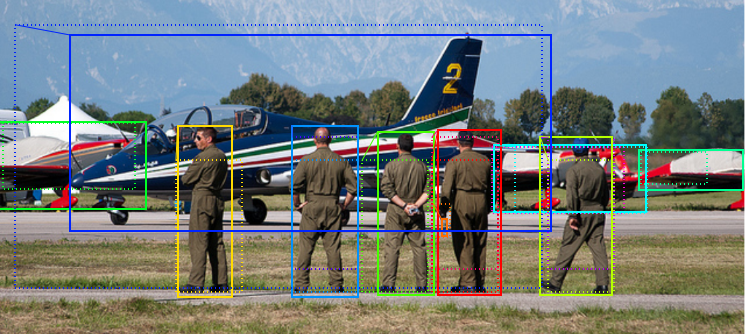
# Display positive anchors before refinement (dotted) and
# after refinement (solid).
visualize.draw_boxes(image, boxes=positive_anchors, refined_boxes=refined_anchors, ax=get_ax())
# Run RPN sub-graph
pillar = model.keras_model.get_layer("ROI").output # node to start searching from # TF 1.4 introduces a new version of NMS. Search for both names to support TF 1.3 and 1.4
nms_node = model.ancestor(pillar, "ROI/rpn_non_max_suppression:0")
if nms_node is None:
nms_node = model.ancestor(pillar, "ROI/rpn_non_max_suppression/NonMaxSuppressionV2:0") rpn = model.run_graph([image], [
("rpn_class", model.keras_model.get_layer("rpn_class").output),
("pre_nms_anchors", model.ancestor(pillar, "ROI/pre_nms_anchors:0")),
("refined_anchors", model.ancestor(pillar, "ROI/refined_anchors:0")),
("refined_anchors_clipped", model.ancestor(pillar, "ROI/refined_anchors_clipped:0")),
("post_nms_anchor_ix", nms_node),
("proposals", model.keras_model.get_layer("ROI").output),
])

# Show top anchors by score (before refinement)
limit = 100
sorted_anchor_ids = np.argsort(rpn['rpn_class'][:,:,1].flatten())[::-1]
visualize.draw_boxes(image, boxes=model.anchors[sorted_anchor_ids[:limit]], ax=get_ax())

# Show top anchors with refinement. Then with clipping to image boundaries
limit = 50
ax = get_ax(1, 2)
visualize.draw_boxes(image, boxes=rpn["pre_nms_anchors"][0, :limit],
refined_boxes=rpn["refined_anchors"][0, :limit], ax=ax[0])
visualize.draw_boxes(image, refined_boxes=rpn["refined_anchors_clipped"][0, :limit], ax=ax[1])

# Show refined anchors after non-max suppression
limit = 50
ixs = rpn["post_nms_anchor_ix"][:limit]
visualize.draw_boxes(image, refined_boxes=rpn["refined_anchors_clipped"][0, ixs], ax=get_ax())

# Show final proposals
# These are the same as the previous step (refined anchors
# after NMS) but with coordinates normalized to [0, 1] range.
limit = 50
# Convert back to image coordinates for display
h, w = config.IMAGE_SHAPE[:2]
proposals = rpn['proposals'][0, :limit] * np.array([h, w, h, w])
visualize.draw_boxes(image, refined_boxes=proposals, ax=get_ax())

# Measure the RPN recall (percent of objects covered by anchors)
# Here we measure recall for 3 different methods:
# - All anchors
# - All refined anchors
# - Refined anchors after NMS
iou_threshold = 0.7 recall, positive_anchor_ids = utils.compute_recall(model.anchors, gt_bbox, iou_threshold)
print("All Anchors ({:5}) Recall: {:.3f} Positive anchors: {}".format(
model.anchors.shape[0], recall, len(positive_anchor_ids))) recall, positive_anchor_ids = utils.compute_recall(rpn['refined_anchors'][0], gt_bbox, iou_threshold)
print("Refined Anchors ({:5}) Recall: {:.3f} Positive anchors: {}".format(
rpn['refined_anchors'].shape[1], recall, len(positive_anchor_ids))) recall, positive_anchor_ids = utils.compute_recall(proposals, gt_bbox, iou_threshold)
print("Post NMS Anchors ({:5}) Recall: {:.3f} Positive anchors: {}".format(
proposals.shape[0], recall, len(positive_anchor_ids)))

# Get input and output to classifier and mask heads.
mrcnn = model.run_graph([image], [
("proposals", model.keras_model.get_layer("ROI").output),
("probs", model.keras_model.get_layer("mrcnn_class").output),
("deltas", model.keras_model.get_layer("mrcnn_bbox").output),
("masks", model.keras_model.get_layer("mrcnn_mask").output),
("detections", model.keras_model.get_layer("mrcnn_detection").output),
])

# Get detection class IDs. Trim zero padding.
det_class_ids = mrcnn['detections'][0, :, 4].astype(np.int32)
det_count = np.where(det_class_ids == 0)[0][0]
det_class_ids = det_class_ids[:det_count]
detections = mrcnn['detections'][0, :det_count] print("{} detections: {}".format(
det_count, np.array(dataset.class_names)[det_class_ids])) captions = ["{} {:.3f}".format(dataset.class_names[int(c)], s) if c > 0 else ""
for c, s in zip(detections[:, 4], detections[:, 5])]
visualize.draw_boxes(
image,
refined_boxes=detections[:, :4],
visibilities=[2] * len(detections),
captions=captions, title="Detections",
ax=get_ax())
# Proposals are in normalized coordinates. Scale them
# to image coordinates.
h, w = config.IMAGE_SHAPE[:2]
proposals = np.around(mrcnn["proposals"][0] * np.array([h, w, h, w])).astype(np.int32) # Class ID, score, and mask per proposal
roi_class_ids = np.argmax(mrcnn["probs"][0], axis=1)
roi_scores = mrcnn["probs"][0, np.arange(roi_class_ids.shape[0]), roi_class_ids]
roi_class_names = np.array(dataset.class_names)[roi_class_ids]
roi_positive_ixs = np.where(roi_class_ids > 0)[0] # How many ROIs vs empty rows?
print("{} Valid proposals out of {}".format(np.sum(np.any(proposals, axis=1)), proposals.shape[0]))
print("{} Positive ROIs".format(len(roi_positive_ixs))) # Class counts
print(list(zip(*np.unique(roi_class_names, return_counts=True))))

# Display a random sample of proposals.
# Proposals classified as background are dotted, and
# the rest show their class and confidence score.
limit = 200
ixs = np.random.randint(0, proposals.shape[0], limit)
captions = ["{} {:.3f}".format(dataset.class_names[c], s) if c > 0 else ""
for c, s in zip(roi_class_ids[ixs], roi_scores[ixs])]
visualize.draw_boxes(image, boxes=proposals[ixs],
visibilities=np.where(roi_class_ids[ixs] > 0, 2, 1),
captions=captions, title="ROIs Before Refinement",
ax=get_ax())

# Class-specific bounding box shifts.
roi_bbox_specific = mrcnn["deltas"][0, np.arange(proposals.shape[0]), roi_class_ids]
log("roi_bbox_specific", roi_bbox_specific) # Apply bounding box transformations
# Shape: [N, (y1, x1, y2, x2)]
refined_proposals = utils.apply_box_deltas(
proposals, roi_bbox_specific * config.BBOX_STD_DEV).astype(np.int32)
log("refined_proposals", refined_proposals) # Show positive proposals
# ids = np.arange(roi_boxes.shape[0]) # Display all
limit = 5
ids = np.random.randint(0, len(roi_positive_ixs), limit) # Display random sample
captions = ["{} {:.3f}".format(dataset.class_names[c], s) if c > 0 else ""
for c, s in zip(roi_class_ids[roi_positive_ixs][ids], roi_scores[roi_positive_ixs][ids])]
visualize.draw_boxes(image, boxes=proposals[roi_positive_ixs][ids],
refined_boxes=refined_proposals[roi_positive_ixs][ids],
visibilities=np.where(roi_class_ids[roi_positive_ixs][ids] > 0, 1, 0),
captions=captions, title="ROIs After Refinement",
ax=get_ax())

# Remove boxes classified as background
keep = np.where(roi_class_ids > 0)[0]
print("Keep {} detections:\n{}".format(keep.shape[0], keep))

# Remove low confidence detections
keep = np.intersect1d(keep, np.where(roi_scores >= config.DETECTION_MIN_CONFIDENCE)[0])
print("Remove boxes below {} confidence. Keep {}:\n{}".format(
config.DETECTION_MIN_CONFIDENCE, keep.shape[0], keep))

# Apply per-class non-max suppression
pre_nms_boxes = refined_proposals[keep]
pre_nms_scores = roi_scores[keep]
pre_nms_class_ids = roi_class_ids[keep] nms_keep = []
for class_id in np.unique(pre_nms_class_ids):
# Pick detections of this class
ixs = np.where(pre_nms_class_ids == class_id)[0]
# Apply NMS
class_keep = utils.non_max_suppression(pre_nms_boxes[ixs],
pre_nms_scores[ixs],
config.DETECTION_NMS_THRESHOLD)
# Map indicies
class_keep = keep[ixs[class_keep]]
nms_keep = np.union1d(nms_keep, class_keep)
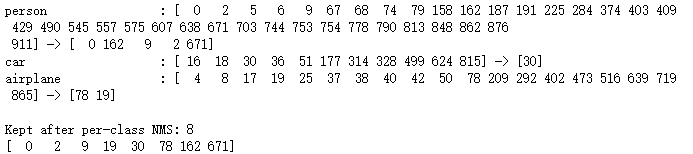
print("{:22}: {} -> {}".format(dataset.class_names[class_id][:20],
keep[ixs], class_keep)) keep = np.intersect1d(keep, nms_keep).astype(np.int32)
print("\nKept after per-class NMS: {}\n{}".format(keep.shape[0], keep))
# Show final detections
ixs = np.arange(len(keep)) # Display all
# ixs = np.random.randint(0, len(keep), 10) # Display random sample
captions = ["{} {:.3f}".format(dataset.class_names[c], s) if c > 0 else ""
for c, s in zip(roi_class_ids[keep][ixs], roi_scores[keep][ixs])]
visualize.draw_boxes(
image, boxes=proposals[keep][ixs],
refined_boxes=refined_proposals[keep][ixs],
visibilities=np.where(roi_class_ids[keep][ixs] > 0, 1, 0),
captions=captions, title="Detections after NMS",
ax=get_ax())

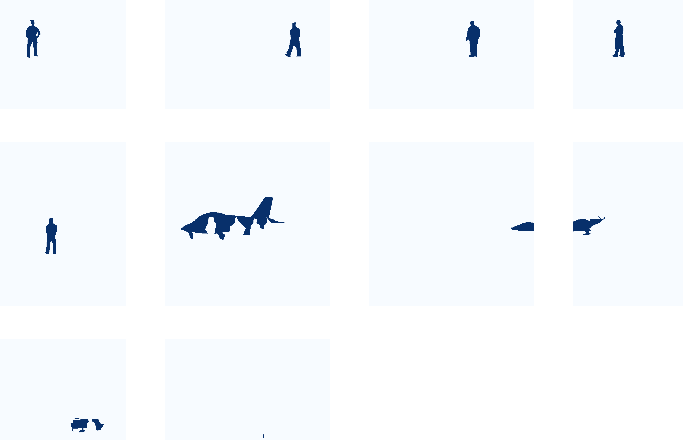
display_images(np.transpose(gt_mask, [2, 0, 1]), cmap="Blues")
# Get predictions of mask head
mrcnn = model.run_graph([image], [
("detections", model.keras_model.get_layer("mrcnn_detection").output),
("masks", model.keras_model.get_layer("mrcnn_mask").output),
]) # Get detection class IDs. Trim zero padding.
det_class_ids = mrcnn['detections'][0, :, 4].astype(np.int32)
det_count = np.where(det_class_ids == 0)[0][0]
det_class_ids = det_class_ids[:det_count] print("{} detections: {}".format(
det_count, np.array(dataset.class_names)[det_class_ids]))

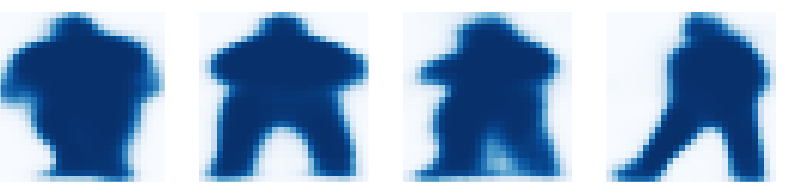
# Masks
det_boxes = mrcnn["detections"][0, :, :4].astype(np.int32)
det_mask_specific = np.array([mrcnn["masks"][0, i, :, :, c]
for i, c in enumerate(det_class_ids)])
det_masks = np.array([utils.unmold_mask(m, det_boxes[i], image.shape)
for i, m in enumerate(det_mask_specific)])
log("det_mask_specific", det_mask_specific)
log("det_masks", det_masks)

display_images(det_mask_specific[:4] * 255, cmap="Blues", interpolation="none")
display_images(det_masks[:4] * 255, cmap="Blues", interpolation="none")

# Get activations of a few sample layers
activations = model.run_graph([image], [
("input_image", model.keras_model.get_layer("input_image").output),
("res4w_out", model.keras_model.get_layer("res4w_out").output), # for resnet100
("rpn_bbox", model.keras_model.get_layer("rpn_bbox").output),
("roi", model.keras_model.get_layer("ROI").output),
])

# Input image (normalized)
_ = plt.imshow(modellib.unmold_image(activations["input_image"][0],config))

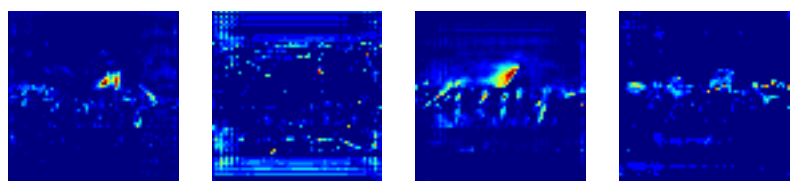
# Backbone feature map
display_images(np.transpose(activations["res4w_out"][0,:,:,:4], [2, 0, 1]))
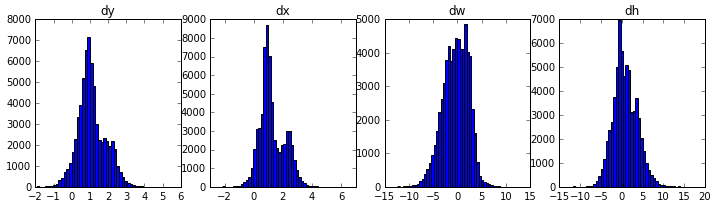
# Histograms of RPN bounding box deltas
plt.figure(figsize=(12, 3))
plt.subplot(1, 4, 1)
plt.title("dy")
_ = plt.hist(activations["rpn_bbox"][0,:,0], 50)
plt.subplot(1, 4, 2)
plt.title("dx")
_ = plt.hist(activations["rpn_bbox"][0,:,1], 50)
plt.subplot(1, 4, 3)
plt.title("dw")
_ = plt.hist(activations["rpn_bbox"][0,:,2], 50)
plt.subplot(1, 4, 4)
plt.title("dh")
_ = plt.hist(activations["rpn_bbox"][0,:,3], 50)
# Distribution of y, x coordinates of generated proposals
plt.figure(figsize=(10, 5))
plt.subplot(1, 2, 1)
plt.title("y1, x1")
plt.scatter(activations["roi"][0,:,0], activations["roi"][0,:,1])
plt.subplot(1, 2, 2)
plt.title("y2, x2")
plt.scatter(activations["roi"][0,:,2], activations["roi"][0,:,3])
plt.show()

吴裕雄 PYTHON 人工智能——基于MASK_RCNN目标检测(4)的更多相关文章
- 吴裕雄 PYTHON 人工智能——基于MASK_RCNN目标检测(5)
import os import sys import numpy as np import tensorflow as tf import matplotlib import matplotlib. ...
- 吴裕雄 python 人工智能——基于Mask_RCNN目标检测(3)
import os import sys import random import math import re import time import numpy as np import cv2 i ...
- 吴裕雄 python 人工智能——基于Mask_RCNN目标检测(2)
import os import sys import itertools import math import logging import json import re import random ...
- 吴裕雄 python 人工智能——基于Mask_RCNN目标检测(1)
import os import sys import random import math import numpy as np import skimage.io import matplotli ...
- 吴裕雄 python 人工智能——基于神经网络算法在智能医疗诊断中的应用探索代码简要展示
#K-NN分类 import os import sys import time import operator import cx_Oracle import numpy as np import ...
- 吴裕雄 PYTHON 人工智能——智能医疗系统后台智能分诊模块及系统健康养生公告简约版代码展示
#coding:utf-8 import sys import cx_Oracle import numpy as np import pandas as pd import tensorflow a ...
- 吴裕雄 python 人工智能——智能医疗系统后台用户复诊模块简约版代码展示
#复诊 import sys import os import time import operator import cx_Oracle import numpy as np import pand ...
- 吴裕雄 python 人工智能——智能医疗系统后台用户注册、登录和初诊简约版代码展示
#用户注册.登录模块 #数据库脚本 CREATE TABLE usertable( userid number(8) primary key not null , username varchar(5 ...
- TF项目实战(基于SSD目标检测)——人脸检测1
SSD实战——人脸检测 Tensorflow 一 .人脸检测的困难: 1. 姿态问题 2.不同种族人, 3.光照 遮挡 带眼睛 4.视角不同 5. 不同尺度 二. 数据集介绍以及转化VOC: 1. F ...
随机推荐
- 《深入理解Java虚拟机》读书笔记七
第八章 虚拟机字节码执行引擎 1.运行时栈帧结构 概述: 栈帧是用于支持虚拟机进行方法调用的和方法执行的数据结构,他是虚拟机运行时数据区中的虚拟机栈的栈元素,栈帧存储了方法的局部变量,操作数栈,动态连 ...
- ORA-04089: cannot create triggers on objects owned by SYS
04089 问题原因 因为你在以sys用户创建触发器,但oracle却不建议在sys用户下创建触发器.
- Centos7 安装 GitLab 代码管理服务器
一.安装依赖 yum -y install policycoreutils openssh-server openssh-clients postfix 二.启动postfix,并设置开机自启动 sy ...
- jsonp实现js跨域请求
sonp是跨域通信的一个协议 具体来说jsonp实现跨域请求其实是使用js文件引用(js文件不一定是.js结尾)可跨域的性质,将请求的结果包裹在客户端需要调用的js方法内部.需要前后端配合使用. 前段 ...
- js控制日期的前或后N天,前或后一个月
/*获取指定日期前或者后指定间隔时间* sdate:指定日期* interval:时间间隔* caret:间隔符*/function getNowFormatDate(sdate,interval,c ...
- python 批量编译 批量删除
把项目的py文件变异成pyc文件,好处是可以保护源码不泄露. 假如一个工程文件夹有1000个py文件,这个时候怎样快速处理 ? 两步走: ① py--->pyc python -m compi ...
- List数组排序
import java.util.ArrayList; import java.util.Collections; import java.util.Comparator; import java.u ...
- GitHub的安装和第一次上传本地项目
网站的新用户注册:http://www.github.com 安装:下载之后安装,一路下一步就可以了,安装完成后打开Git Bash,进入bash界面. 邮箱注册: $ git config --gl ...
- Codeforces Round #619 (Div. 2)D(模拟)
先把一种最长路线记录下来,根据k的大小存到ans中相应的答案再输出 #define HAVE_STRUCT_TIMESPEC #include<bits/stdc++.h> using n ...
- c#常用控件及简写
c#常用控件及简写