机器学习进阶-图像金字塔与轮廓检测-轮廓检测 1.cv2.cvtColor(图像颜色转换) 2.cv2.findContours(找出图像的轮廓) 3.cv2.drawContours(画出图像轮廓) 4.cv2.contourArea(轮廓面积) 5.cv2.arcLength(轮廓周长) 6.cv2.aprroxPloyDP(获得轮廓近似) 7.cv2.boudingrect(外接圆)..
1. cv2.cvtcolor(img, cv2.COLOR_BGR2GRAY) # 将彩色图转换为灰度图
参数说明: img表示输入的图片, cv2.COLOR_BGR2GRAY表示颜色的变换形式
2. cv2.findContours(img,mode, method) # 找出图中的轮廓值,得到的轮廓值都是嵌套格式的
参数说明:img表示输入的图片,mode表示轮廓检索模式,通常都使用RETR_TREE找出所有的轮廓值,method表示轮廓逼近方法,使用NONE表示所有轮廓都显示
3. cv2.drawCountours(img, contours, -1, (0, 0, 255), 2) # 画出图片中的轮廓值,也可以用来画轮廓的近似值
参数说明:img表示输入的需要画的图片, contours表示轮廓值,-1表示轮廓的索引,(0, 0, 255)表示颜色, 2表示线条粗细
4. cv2.contourArea(cnt, True) # 计算轮廓的面积
参数说明:cnt为输入的单个轮廓值
5. cv2.arcLength(cnt, True) # 计算轮廓的周长
参数说明:cnt为输入的单个轮廓值
6. cv2.aprroxPolyDP(cnt, epsilon, True) # 用于获得轮廓的近似值,使用cv2.drawCountors进行画图操作
参数说明:cnt为输入的轮廓值, epsilon为阈值T,通常使用轮廓的周长作为阈值,True表示的是轮廓是闭合的
7. x, y, w, h = cv2.boudingrect(cnt) # 获得外接矩形
参数说明:x,y, w, h 分别表示外接矩形的x轴和y轴的坐标,以及矩形的宽和高, cnt表示输入的轮廓值
8 cv2.rectangle(img, (x, y), (x+w, y+h), (0, 255, 0), 2) # 根据坐标在图像上画出矩形
参数说明: img表示传入的图片, (x, y)表示左上角的位置, (x+w, y+h)表示加上右下角的位置,(0, 255, 0)表示颜色,2表示线条的粗细
9. (x, y), radius = cv2.minEnclosingCircle(cnt) # 获得外接圆的位置信息
参数说明: (x, y)表示外接圆的圆心,radius表示外接圆的半径, cnt表示输入的轮廓
10. cv2.Cricle(img, center, radius, (0, 255, 0), 2) # 根据坐标在图上画出圆
参数说明:img表示需要画的图片,center表示圆的中心点,radius表示圆的半径, (0, 255, 0)表示颜色, 2表示线条的粗细
轮廓检测:轮廓检测相较于canny边缘检测,轮廓检测的线条要更少一些,在opencv中,使用的函数是cv2.findCountor进行轮廓检测
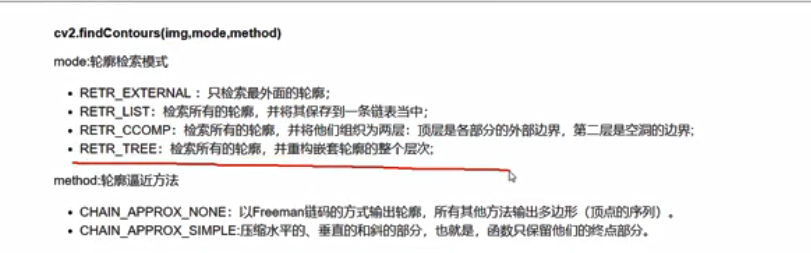
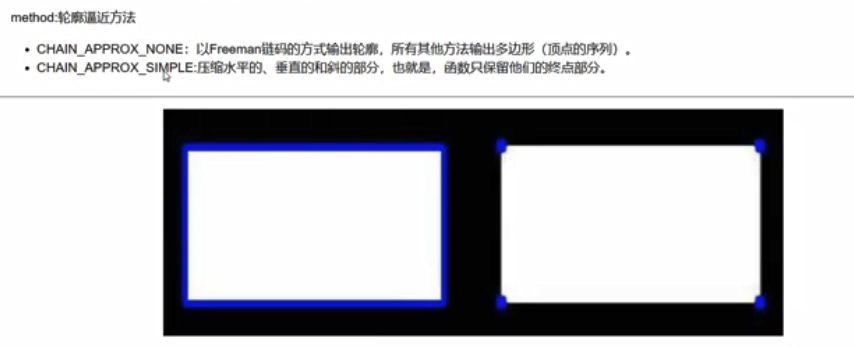
上图是轮廓检测过程中所使用的方法,一般我们使用mode RETR_TREE检测出所有的轮廓值, 对于method方法的区别在一种把边缘都检测出来,一种压缩在拐点位置
1.轮廓检测与画图:
代码:
第一步:载入图片
第二步:使用cv2.cvtcolor() 将图片转换为灰度图
第三步: 使用cv2.threshold将图片做二值化转换
第四步: 使用cv2.findContours 找出图片的轮廓值
第五步:使用cv2.drawContours在图片上画上轮廓
第六步: 使用cv2.imshow 完成画图操作
import cv2
import numpy as np def cv_show(img, name):
cv2.imshow(name, img)
cv2.waitKey(0)
cv2.destroyAllWindows() # 第一步读入图片
img = cv2.imread('car.png')
# 第二步:对图片做灰度变化
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 第三步:对图片做二值变化
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY) # 第四步:获得图片的轮廓值
Binary, contours, h = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE) # 第五步:在图片中画出图片的轮廓值
draw_img = img.copy()
ret = cv2.drawContours(draw_img, contours, -1, (0, 0, 255), 2)
# 第六步:画出带有轮廓的原始图片
cv_show(ret, 'ret')

2. 轮廓的周长和面积
使用cv2.findCountor获得的轮廓contours是一个嵌套的类型,即我们可以通过cnt = contours获得第一个物体的轮廓值
代码:
第一步:载入图片,做灰度值和二值化处理,并使用cv2.findCountor找出轮廓值,使用cv2.drawCountors画出第一个图像的轮廓
第二步:通过索引取出第一个轮廓值cnt,使用cv2.ContourArea()计算轮廓的面积
第三步:使用cv2.arcLength 获得轮廓的周长
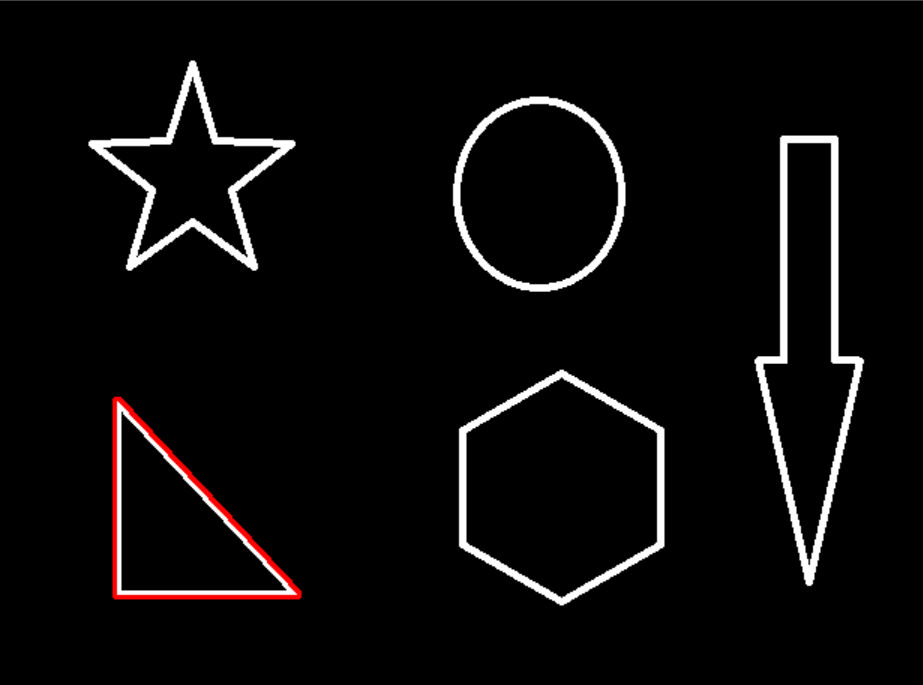
# 使用另外一个图进行轮廓的测试 # 第一步:载入图片,灰度化和二值化处理,使用cv2.findContours找出轮廓, 使用cv2.drawContours进行画图操作
img = cv2.imread('contours.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY) binary, contours, h = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE) draw_img = img.copy()
# 参数说明,draw_img 需要作图的原始图像, contours表示轮廓, 0表示轮廓索引, (0, 0, 255)表示颜色, 2表示线条粗细
ret = cv2.drawContours(draw_img, contours, 0, (0, 0, 255), 2)
cv_show(ret, 'ret')
# 取出单个的轮廓值
cnt = contours[0] # 第二步:计算轮廓的面积
area = cv2.contourArea(cnt) # 第三步: 计算轮廓的周长
length= cv2.arcLength(cnt, True) print(area, length)
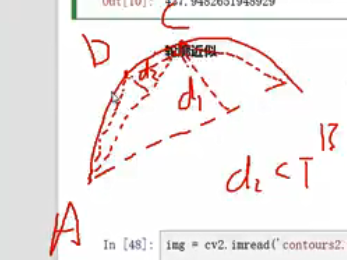
3. 轮廓近似(RDP), 假设存在一个曲线A, B,在曲线上存在一个C点,离AB线段的距离最远,记为d1, 如果d1 < T(自己设定的阈值), 将AB线段作为AB曲线的替代,否者连接AC和BC, 计算AC线段上的D点离AB距离最远,记为d2,如果d2 < T,则使用AC线段替代AC曲线,否者继续连接划分
代码:
第一步:读取图片,灰度化和二值化,使用cv2.findcontours找出轮廓
第二步:使用轮廓索引提取第一个轮廓值
第三步:使用cv2.arcLength即轮廓周长的倍数作为阈值,阈值越小,轮廓与轮廓的越近似
第四步:使用cv2.approxPolyDP(cnt, epilison)
第五步:使用cv2.drawContours进行画图操作
import cv2
import numpy as np def cv_show(img, name):
cv2.imshow(name, img)
cv2.waitKey(0)
cv2.destroyAllWindows() # 第一步读入图片
img = cv2.imread('car.png')
# 第二步:对图片做灰度变化
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 第三步:对图片做二值变化
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY) # 第四步:获得图片的轮廓值
Binary, contours, h = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE) # 第五步:在图片中画出图片的轮廓值
draw_img = img.copy()
ret = cv2.drawContours(draw_img, contours, -1, (0, 0, 255), 2)
# 第六步:画出带有轮廓的原始图片
cv_show(ret, 'ret') # 使用另外一个图进行轮廓的测试 # 第一步:载入图片,灰度化和二值化处理,使用cv2.findContours找出轮廓, 使用cv2.drawContours进行画图操作
img = cv2.imread('contours.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY) binary, contours, h = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE) draw_img = img.copy()
# 参数说明,draw_img 需要作图的原始图像, contours表示轮廓, 0表示轮廓索引, (0, 0, 255)表示颜色, 2表示线条粗细
ret = cv2.drawContours(draw_img, contours, 0, (0, 0, 255), 2)
cv_show(ret, 'ret')
# 取出单个的轮廓值
cnt = contours[0] # 第二步:计算轮廓的面积
area = cv2.contourArea(cnt) # 第三步: 计算轮廓的周长
length= cv2.arcLength(cnt, True) print(area, length) # 轮廓近似
img = cv2.imread('contours2.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY) Binary, contours, h = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE) cnt = contours[0] # 使用周长的倍数作为阈值,阈值越小,图像的轮廓近似与轮廓越近似
epsilon = 0.1 * cv2.arcLength(cnt, True) approx = cv2.approxPolyDP(cnt, epsilon, True) draw_img = img.copy()
ret = cv2.drawContours(draw_img, [approx], -1, (0, 0, 255), 2)
cv_show(ret, 'ret')
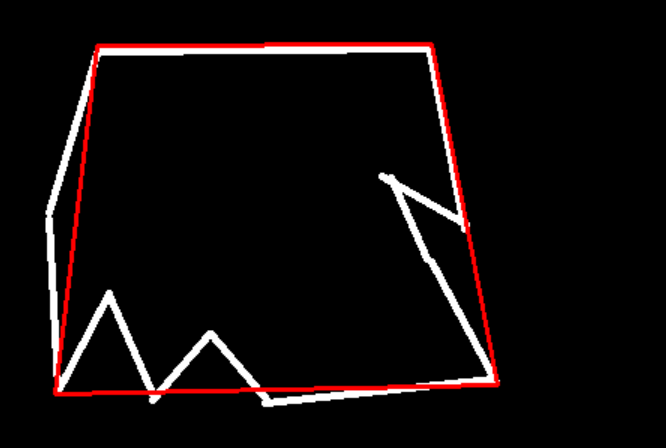
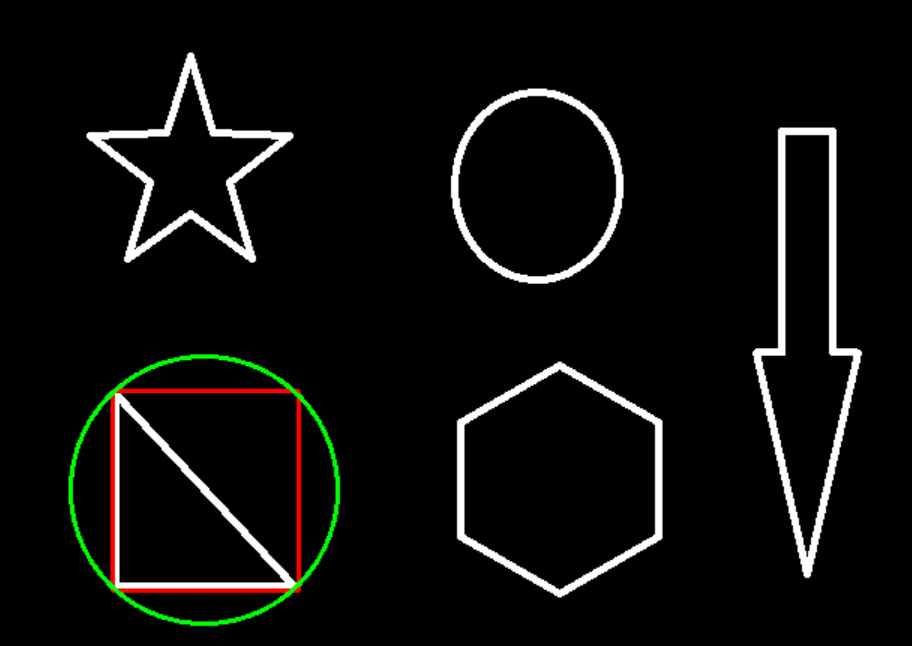
4. 外接矩形和外接圆
外接矩形: 使用cv2.boudingrect(cnt)获得轮廓的外接矩形,使用cv2.rectangle(img, (x, y), (x+w, y+h), (0, 0, 255), 2)画出矩阵的轮廓
外接圆: 使用cv2.minEnclosingCircle(cnt)获得轮廓的外接圆,使用cv2.circle(ret, centers, radius, (0, 0, 255), 2)画出圆的轮廓
代码:
第一步:载入图片,灰度化,二值化,使用cv2.findCountors找出图像的轮廓,使用轮廓索引获得第一个轮廓cnt
第二步:使用cv2.boundingrect(cnt) ,获得轮廓的x,y,w, h (x, y)表示左上角的坐标,w为宽,h为长
第三步: 使用cv2.rectangle 绘制外接的轮廓
第四步: 使用cv2.minEnclosingCircle(cnt), 获得center和radius,即圆心点的坐标和圆的半径
第五步: 使用cv2.circle(img, center, radius, (0, 0, 255), 2) 绘制圆心的外接轮廓
# 外接矩阵
img = cv2.imread('contours.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
res, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
binary, contours, h = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
cnt = contours[0]
x, y, w, h = cv2.boundingRect(cnt)
ret = cv2.rectangle(img, (x, y), (x+w, y+h), (0, 0, 255), 2)
cv_show(ret, 'ret')
print('矩形面积 / 外接矩形面积', cv2.contourArea(cnt) / (w*h))
# 外接圆

(x, y), radius = cv2.minEnclosingCircle(cnt)
center = (int(x), int(y))
radius = int(radius)
ret = cv2.circle(ret, center, radius, (0, 255, 0), 2)
cv_show(ret, 'ret')
机器学习进阶-图像金字塔与轮廓检测-轮廓检测 1.cv2.cvtColor(图像颜色转换) 2.cv2.findContours(找出图像的轮廓) 3.cv2.drawContours(画出图像轮廓) 4.cv2.contourArea(轮廓面积) 5.cv2.arcLength(轮廓周长) 6.cv2.aprroxPloyDP(获得轮廓近似) 7.cv2.boudingrect(外接圆)..的更多相关文章
- 机器学习进阶-案例实战-答题卡识别判 1.cv2.getPerspectiveTransform(获得投射变化后的H矩阵) 2.cv2.warpPerspective(H获得变化后的图像) 3.cv2.approxPolyDP(近似轮廓) 4.cv2.threshold(二值变化) 7.cv2.countNonezeros(非零像素点个数)6.cv2.bitwise_and(与判断)
1.H = cv2.getPerspectiveTransform(rect, transform_axes) 获得投射变化后的H矩阵 参数说明:rect表示原始的位置左上,右上,右下,左下, tra ...
- 机器学习进阶-人脸关键点检测 1.dlib.get_frontal_face_detector(构建人脸框位置检测器) 2.dlib.shape_predictor(绘制人脸关键点检测器) 3.cv2.convexHull(获得凸包位置信息)
1.dlib.get_frontal_face_detector() # 获得人脸框位置的检测器, detector(gray, 1) gray表示灰度图, 2.dlib.shape_predict ...
- 机器学习进阶-疲劳检测(眨眼检测) 1.dist.eculidean(计算两个点的欧式距离) 2.dlib.get_frontal_face_detector(脸部位置检测器) 3.dlib.shape_predictor(脸部特征位置检测器) 4.Orderdict(构造有序的字典)
1.dist.eculidean(A, B) # 求出A和B点的欧式距离 参数说明:A,B表示位置信息 2.dlib.get_frontal_face_detector()表示脸部位置检测器 3.dl ...
- 机器学习进阶-图像金字塔与轮廓检测-图像金字塔-(**高斯金字塔) 1.cv2.pyrDown(对图片做向下采样) 2.cv2.pyrUp(对图片做向上采样)
1.cv2.pyrDown(src) 对图片做向下采样操作,通常也可以做模糊化处理 参数说明:src表示输入的图片 2.cv2.pyrUp(src) 对图片做向上采样操作 参数说明:src表示输入的 ...
- 机器学习进阶-图像金字塔与轮廓检测-模板匹配(单目标匹配和多目标匹配)1.cv2.matchTemplate(进行模板匹配) 2.cv2.minMaxLoc(找出矩阵最大值和最小值的位置(x,y)) 3.cv2.rectangle(在图像上画矩形)
1. cv2.matchTemplate(src, template, method) # 用于进行模板匹配 参数说明: src目标图像, template模板,method使用什么指标做模板的匹配 ...
- 3. OpenCV-Python——图像梯度算法、边缘检测、图像金字塔与轮廓检测、直方图与傅里叶变换
一.图像梯度算法 1.图像梯度-Sobel算子 dst = cv2.Sobel(src, ddepth, dx, dy, ksize) ddepth:图像的深度 dx和dy分别表示水平和竖直方向 ks ...
- 机器学习进阶-项目实战-信用卡数字识别 1.cv2.findContour(找出轮廓) 2.cv2.boudingRect(轮廓外接矩阵位置) 3.cv2.threshold(图片二值化操作) 4.cv2.MORPH_TOPHAT(礼帽运算突出线条) 5.cv2.MORPH_CLOSE(闭运算图片内部膨胀) 6. cv2.resize(改变图像大小) 7.cv2.putText(在图片上放上文本)
7. cv2.putText(img, text, loc, text_font, font_scale, color, linestick) # 参数说明:img表示输入图片,text表示需要填写的 ...
- 机器学习进阶-图像特征harris-角点检测 1.cv2.cornerHarris(进行角点检测)
1.cv2.cornerHarris(gray, 2, 3, 0.04) # 找出图像中的角点 参数说明:gray表示输入的灰度图,2表示进行角点移动的卷积框,3表示后续进行梯度计算的sobel算子 ...
- 机器学习进阶-背景建模-(帧差法与混合高斯模型) 1.cv2.VideoCapture(进行视频读取) 2.cv2.getStructureElement(构造形态学的卷积) 3.cv2.createBackgroundSubtractorMOG2(构造高斯混合模型) 4.cv2.morpholyEx(对图像进行形态学的变化)
1. cv2.VideoCapture('test.avi') 进行视频读取 参数说明:‘test.avi’ 输入视频的地址2. cv2.getStructureElement(cv2.MORPH_E ...
随机推荐
- 【IIS错误 - HTTP 错误 500.19】HTTP 错误 500.19- Internal Server Error 错误解决方法(二)
昨天在 windows 7 下用 IIS 7.5 运行一个以前用 .NET Framework 3.5 写的项目,发现总是出现 500.19 错误,如下: 百度了好久,没找到解决问题确切的答案,我也知 ...
- [转]jvm加载类规则
jvm包括三种类加载器: 第一种:bootstrap classloader:加载Java的核心类. 第二种:extension classloader:负责加载jre的扩展目录中的jar包. 第三种 ...
- C语言中sizeof与strlen的区别
1.sizeof sizeof为编译时期被替换,不会等到程序运行再来判断,所以sizeof返回的是数组的总字节数 #include<stdio.h> int main() { ]={'a' ...
- java为什么匿名内部类的参数引用时final(转)
https://blog.csdn.net/z69183787/article/details/68490440 https://www.zhihu.com/question/21395848 htt ...
- Jmeter(十一)参数化
有关参数化的概念,前面有篇随笔已经粗略的提到了参数化的一点内容.本篇来主要记录参数化. Jmeter的参数化方式有很多,在此我来一一记录,对待不同个规模.业务模型.数据量来进行记录参数化的方法. 一. ...
- [UE4]圆形的动态材质,使用VectorParameter、Get Dynamic Material、Set Vector Parameter Value
一.新建一个名为M_FriendColor的材质.使用VectorParameter函数 二.新建一个名为FriendFlag的UserWidget,生成随机颜色,并传递给上一步设置的材质参数Colo ...
- version control(关于版本控制)
版本控制(Version Control Systems)是一种记录一个或若干文件内容变化,以便将来查阅特定版本修订情况的系统. 这个系统可以自动帮我们备份文件的每一次更改,并且可以非常方便的恢复到 ...
- 知识点:java 注解 @SuppressWarnings
前言: 简介:java.lang.SuppressWarnings是J2SE5.0中标准的Annotation之一.可以标注在类.字段.方法.参数.构造方法,以及局部变量上.作用:告诉编译器忽略指定的 ...
- linux下开启某个端口的方法:可用于SQL
- Gini系数的原理
转载:https://blog.csdn.net/u010665216/article/details/78528261 首先,我们直接构造赛题结果:真实数据与预测数据: predictions = ...