Linux USB驱动学习总结(二)---- USB设备驱动
USB 设备驱动:
一、USB 描述符:(存在于USB 的E2PROM里面)
1、 设备描述符:struct usb_device_descriptor
2、 配置描述符:struct usb_config_descriptor
3、 接口描述符:struct usb_interface_descriptor
4、 端点描述符:struct usb_endpoint_descriptor
通过命令lsusb 列出系统中所有的USB设备:

通过命令lsusb -v 列出系统中所有的USB设备的各个描述符信息:
设备描述符:
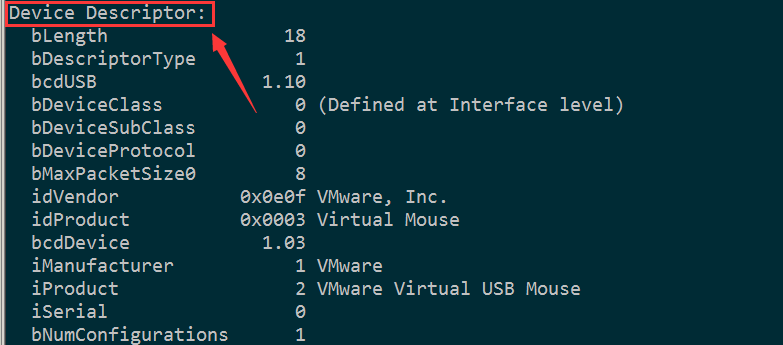
struct usb_device_descriptor {
__u8 bLength; ///长度
__u8 bDescriptorType; ///描述符类型
__le16 bcdUSB;
__u8 bDeviceClass;///设备类型
__u8 bDeviceSubClass;///设备子类型
__u8 bDeviceProtocol;///协议
__u8 bMaxPacketSize0;///最大传输大小
__le16 idVendor;///厂商 ID
__le16 idProduct;///设备 ID
__le16 bcdDevice;///
__u8 iManufacturer;
__u8 iProduct;
__u8 iSerialNumber;///序列号
__u8 bNumConfigurations;///包含的配置数目(每个USB设备会对应多个配置)
} __attribute__ ((packed));
配置描述符:
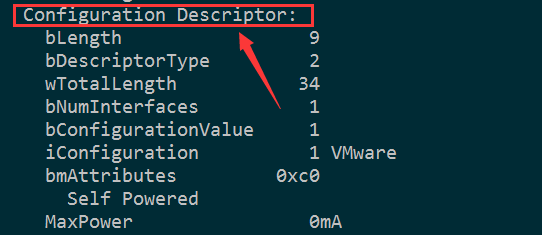
struct usb_config_descriptor { ///USB 配置描述符
__u8 bLength;
__u8 bDescriptorType;
__le16 wTotalLength;///总长度
__u8 bNumInterfaces;///接口数目(每个接口代表一种功能)
__u8 bConfigurationValue;///
__u8 iConfiguration;
__u8 bmAttributes;
__u8 bMaxPower;
} __attribute__ ((packed));
接口描述符:
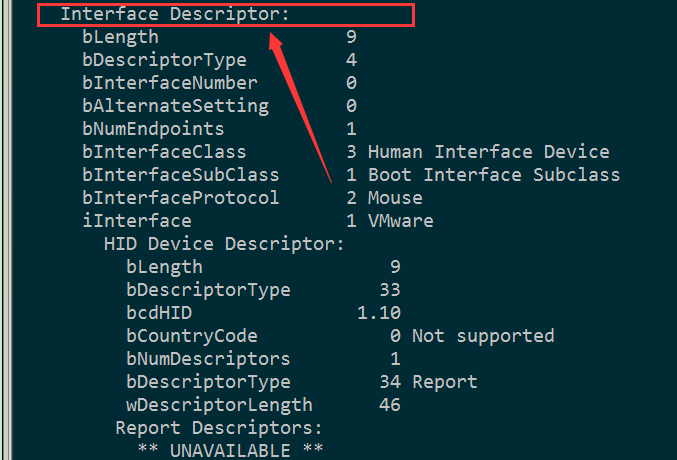
struct usb_interface_descriptor { ///USB 接口描述符
__u8 bLength;
__u8 bDescriptorType;
__u8 bInterfaceNumber;
__u8 bAlternateSetting;
__u8 bNumEndpoints;
__u8 bInterfaceClass;
__u8 bInterfaceSubClass;
__u8 bInterfaceProtocol;
__u8 iInterface;
} __attribute__ ((packed));
端点描述符:
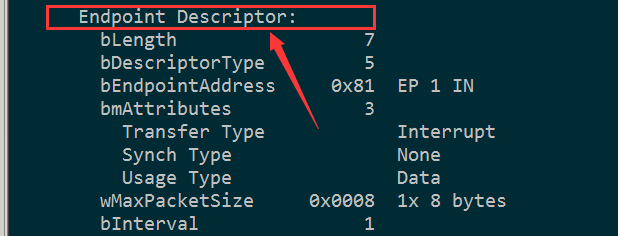
struct usb_endpoint_descriptor { ///USB 端点描述符(每个USB设备最多有16个端点)
__u8 bLength; ///描述符的字节长度
__u8 bDescriptorType;///描述符类型,对于端点就是USB_DT_ENDPOINT
__u8 bEndpointAddress;///bit0~3表示端点地址,bit8 表示方向,输入还是输出
__u8 bmAttributes;///属性(bit0、bit1构成传输类型,00--控制,01--等时,10--批量,11--中断)
__le16 wMaxPacketSize;///端点一次可以处理的最大字节数
__u8 bInterval;///希望主机轮询自己的时间间隔
/* NOTE: these two are _only_ in audio endpoints. */
/* use USB_DT_ENDPOINT*_SIZE in bLength, not sizeof. */
__u8 bRefresh;
__u8 bSynchAddress;
} __attribute__ ((packed));
二、USB的传输方式:(不同的设备对于传输的数据各有各的要求)
1、 控制传输---获取/配置设备
2、 中断传输---例如USB鼠标、USB键盘(这里说的中断和硬件上下文的中断不一样,它不是设备主动发送一个中断请求,而是主控制器在保证不大于某个时间间隔interval内安排的一次数据传输)
3、 批量传输---用于大容量数据传输,没有固定的传输速率,例如usb打印机、扫描仪、U盘等,对应的端点就叫批量端点
4、 等时传输---可以传输大批量数据,但是对数据是否到达没有保证,对实时性要求很高, 例如音频、视频等设备(USB摄像头、USB话筒),对应的端点就叫等时端点
三、URB(usb request block),USB请求块
urb 是usb数据传输机制使用的核心数据结构,urb供usb协议栈使用;
struct urb { //由主机控制器发送给USB设备
struct kref kref; /* reference count of the URB */
void *hcpriv; /* private data for host controller */
atomic_t use_count; /* concurrent submissions counter */
atomic_t reject; /* submissions will fail */
struct list_head urb_list; /* list head for use by the urb's
* current owner */
struct list_head anchor_list; /* the URB may be anchored */
struct usb_anchor *anchor;
struct usb_device *dev; /* (in) pointer to associated device */ ///urb所发送的目标指针,在urb可以被发送到USB核心之前必须由USB驱动程序初始化
struct usb_host_endpoint *ep; /* (internal) pointer to endpoint */
unsigned int pipe; //通过端点的number来得到,决定了主机数据要发送给哪一个设备
unsigned int stream_id; /* (in) stream ID */
int status; /* (return) non-ISO status */
unsigned int transfer_flags; /* (in) URB_SHORT_NOT_OK | ...*/
void *transfer_buffer; /* (in) associated data buffer */ ///in---接收数据buffer,out----发送数据buffer
dma_addr_t transfer_dma; /* (in) dma addr for transfer_buffer *////存在于支持DMA的设备
struct scatterlist *sg; /* (in) scatter gather buffer list */
int num_mapped_sgs; /* (internal) mapped sg entries */
int num_sgs; /* (in) number of entries in the sg list */
u32 transfer_buffer_length; /* (in) data buffer length */
u32 actual_length; /* (return) actual transfer length */
unsigned char *setup_packet; /* (in) setup packet (control only) */
dma_addr_t setup_dma; /* (in) dma addr for setup_packet */
int start_frame; /* (modify) start frame (ISO) */
int number_of_packets; /* (in) number of ISO packets */
int interval; /* (modify) transfer interval ///主机轮询的时间间隔
void *context; /* (in) context for completion *////上下文
usb_complete_t complete; /* (in) completion routine *////完成例程(回调)--当主机发送完urb,设备返回回应信号时执行
};
urb的使用方法:
1、 分配urb
struct urb *usb_alloc_urb(int iso_packets, gfp_t mem_flags); //\drivers\usb\core\urb.c
2、 初始化urb
void usb_fill_[control | int | bulk]_urb{ } ///对应控制传输、中断传输、批量传输
3、 提交urb(提交给主控制器,由主控制器发送给USB设备)
(1) 异步提交urb,提交完成后执行通过usb_fill_[control | int | bulk]_urb 传入的回调函数
int usb_submit_urb(struct urb *urb, gfp_t mem_flags); //\drivers\usb\core\urb.c
(2) 同步提交urb
int usb_[control | interrupt | bulk]_msg () //\drivers\usb\core\Message.c
四、usb驱动数据结构 usb_device
struct usb_device { ///描述一个USB 设备
int devnum;
char devpath[];
u32 route;
enum usb_device_state state;
enum usb_device_speed speed;
struct usb_tt *tt;
int ttport;
unsigned int toggle[];
struct usb_device *parent;
struct usb_bus *bus;
struct usb_host_endpoint ep0;
struct device dev;
struct usb_device_descriptor descriptor;
struct usb_host_bos *bos;
struct usb_host_config *config;
struct usb_host_config *actconfig;
struct usb_host_endpoint *ep_in[];
struct usb_host_endpoint *ep_out[];
char **rawdescriptors;
unsigned short bus_mA;
u8 portnum;
u8 level;
unsigned can_submit:;
unsigned persist_enabled:;
unsigned have_langid:;
unsigned authorized:;
unsigned authenticated:;
unsigned wusb:;
unsigned lpm_capable:;
unsigned usb2_hw_lpm_capable:;
unsigned usb2_hw_lpm_besl_capable:;
unsigned usb2_hw_lpm_enabled:;
unsigned usb2_hw_lpm_allowed:;
unsigned usb3_lpm_enabled:;
int string_langid;
/* static strings from the device */
char *product;
char *manufacturer;
char *serial;
struct list_head filelist;
int maxchild;
u32 quirks;
atomic_t urbnum;
unsigned long active_duration;
#ifdef CONFIG_PM
unsigned long connect_time;
unsigned do_remote_wakeup:;
unsigned reset_resume:;
unsigned port_is_suspended:;
#endif
struct wusb_dev *wusb_dev;
int slot_id;
enum usb_device_removable removable;
struct usb2_lpm_parameters l1_params;
struct usb3_lpm_parameters u1_params;
struct usb3_lpm_parameters u2_params;
unsigned lpm_disable_count;
};
五、 管道
每个端点通过管道和usb主控制器连接,管道包括以下几个部分:
(1) 端点地址
(2) 数据传输方向(in 或 out)
(3) 数据传输模式
usb_[rcv| snd| ctrl| int| bulk| isoc ]pipe
根据端点地址、传输方式和传输方向创建不同的pipe:
#define usb_sndctrlpipe(dev, endpoint) \
((PIPE_CONTROL << ) | __create_pipe(dev, endpoint))
#define usb_rcvctrlpipe(dev, endpoint) \
((PIPE_CONTROL << ) | __create_pipe(dev, endpoint) | USB_DIR_IN)
#define usb_sndisocpipe(dev, endpoint) \
((PIPE_ISOCHRONOUS << ) | __create_pipe(dev, endpoint))
#define usb_rcvisocpipe(dev, endpoint) \
((PIPE_ISOCHRONOUS << ) | __create_pipe(dev, endpoint) | USB_DIR_IN)
#define usb_sndbulkpipe(dev, endpoint) \
((PIPE_BULK << ) | __create_pipe(dev, endpoint))
#define usb_rcvbulkpipe(dev, endpoint) \
((PIPE_BULK << ) | __create_pipe(dev, endpoint) | USB_DIR_IN)
#define usb_sndintpipe(dev, endpoint) \
((PIPE_INTERRUPT << ) | __create_pipe(dev, endpoint))
#define usb_rcvintpipe(dev, endpoint) \
((PIPE_INTERRUPT << ) | __create_pipe(dev, endpoint) | USB_DIR_IN
Linux USB驱动学习总结(二)---- USB设备驱动的更多相关文章
- Linux内核分析(五)----字符设备驱动实现
原文:Linux内核分析(五)----字符设备驱动实现 Linux内核分析(五) 昨天我们对linux内核的子系统进行简单的认识,今天我们正式进入驱动的开发,我们今后的学习为了避免大家没有硬件的缺陷, ...
- linux 块设备驱动 (三)块设备驱动开发
一: 块设备驱动注册与注销 块设备驱动中的第1个工作通常是注册它们自己到内核,完成这个任务的函数是 register_blkdev(),其原型为:int register_blkdev(unsigne ...
- usb驱动开发4之总线设备驱动模型
在上文说usb_init函数,却给我们留下了很多岔路口.这次就来好好聊聊关于总线设备驱动模型.这节只讲理论,不讲其中的函数方法,关于函数方法使用参考其他资料. 总线.设备.驱动对应内核结构体分别为bu ...
- linux驱动学习(二) Makefile高级【转】
转自:http://blog.csdn.net/ghostyu/article/details/6866863 版权声明:本文为博主原创文章,未经博主允许不得转载. 在我前一篇写的[ linux驱动学 ...
- Linux 网卡驱动学习(二)(网络驱动接口小结)
[摘要]前文我们分析了一个虚拟硬件的网络驱动例子,从中我们看到了网络设备的一些接口,其实网络设备驱动和块设备驱动的功能比较类似,都是发送和接收数据包(数据请求).当然它们实际是有很多不同的. 1.引言 ...
- Linux嵌入式学习-烟雾传感器驱动-字符设备驱动-按键驱动
MQ-2烟雾气敏传感器模块在X210v3开发板上的驱动. 现在需要一个MQ-2烟雾气敏传感器模块的驱动.其检测烟雾超过一定的标准后,会返回一个不同的电平,和按键驱动差不多. 但是在编写驱动的时候,需要 ...
- linux驱动学习(八) i2c驱动架构(史上最全) davinc dm368 i2c驱动分析【转】
转自:http://blog.csdn.net/ghostyu/article/details/8094049 版权声明:本文为博主原创文章,未经博主允许不得转载. 目录(?)[-] 预备知识 lin ...
- Linux内核驱动学习(八)GPIO驱动模拟输出PWM
文章目录 前言 原理图 IO模拟输出PWM 设备树 驱动端 调试信息 实验结果 附录 前言 上一篇的学习中介绍了如何在用户空间直接操作GPIO,并写了一个脚本可以产生PWM.本篇的学习会将写一个驱动操 ...
- Linux驱动框架之misc类设备驱动框架
1.何为misc设备 (1)misc中文名就是杂项设备\杂散设备,因为现在的硬件设备多种多样,有好些设备不好对他们进行一个单独的分类,所以就将这些设备全部归属于 杂散设备,也就是misc设备,例如像a ...
- arm-linux字符设备驱动开发之---简单字符设备驱动
一.linux系统将设备分为3类:字符设备.块设备.网络设备.使用驱动程序: 1.字符设备:是指只能一个字节一个字节读写的设备,不能随机读取设备内存中的某一数据,读取数据需要按照先后数据.字符设备是面 ...
随机推荐
- BZOJ 3498 PA2009 Cakes
本题BZOJ权限题,但在bzojch上可以看题面. 题意: N个点m条无向边,每个点有一个点权a. 对于任意一个三元环(i,j,k)(i<j<k),它的贡献为max(ai,aj,ak) 求 ...
- Hive权限管理
最近遇到一个hive权限的问题,先简单记录一下,目前自己的理解不一定对,后续根据自己的理解程度更新 一.hive用户的概念 hive本身没有创建用户的命令,hive的用户就是Linux用户,若当前是用 ...
- 域hash值破解的总结经验
1.vsssown.vbs拷贝域数据库: 1.1上传vssown.vbs文件 上传cscript.exe和vssown.vbs到域服务器上 1.2创建快照 reg query HKEY_LOCAL_M ...
- Mysql的概述
Mysql的概述 Mysql的安装和初次使用 Mysql的基本概念 Mysql的英文单词是: database,简称 DB. 什么是数据库? 用于存储和管理数据的仓库 数据库的特点: 持久化存储数据. ...
- Jenkins(二)---jenkins之Git+maven+jdk+tomcat
git+maven+jdk+tomcat 这四个软件可以百度在linux下的安装,不再赘述. server A ---> jenkins主机ip:192.168.100.119 serve ...
- Java利用poi生成word(包含插入图片,动态表格,行合并)
转(小改): Java利用poi生成word(包含插入图片,动态表格,行合并) 2018年12月20日 09:06:51 wjw_11093010 阅读数:70 Java利用poi生成word(包含插 ...
- c/c++基本数据类型转换
If either operand is of type long double, the other operand is converted to type long double. If the ...
- Docker入门与应用系列(四)网络管理
一.Docker的五种网络模式 在使用docker run创建docker容器时,可以用--net选项指定容器的网络模式,Docker有以下5种网络模式: 1. bridge模式 使用docker r ...
- UITextView默认文字提示
在UITextField中自带placeholder属性,可以用于提示输入框信息.但是UITextView并不具备此功能介绍两种方法来实现:第一种:初始化UITextView//首先定义UITextV ...
- Mongo 后台加索引踩坑
背景,随着mongo数据量变大,查询效率变低,要对索引进行优化,所在公司对mongo依赖比较严重,而DBA并不对mongo的权限做控制,所以每个后端开发都有mongo的读写权限,通常每个人各自管理自己 ...