目标检测后处理之NMS(非极大值抑制算法)
1、定义:
非极大值抑制算法NMS广泛应用于目标检测算法,其目的是为了消除多余的候选框,找到最佳的物体检测位置。
2、原理:
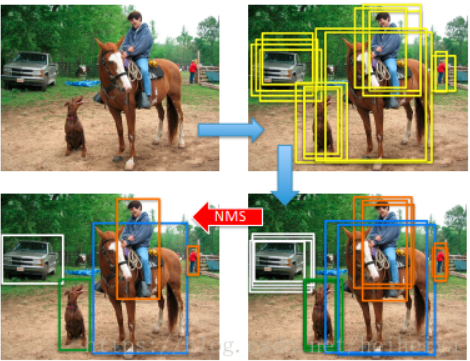
使用深度学习模型检测出的目标都有多个框,如下图,针对每一个被检测目标,为了得到效果最好的那一个,需要使用一定的过滤技术把多余的框过滤掉。NMS应运而生。
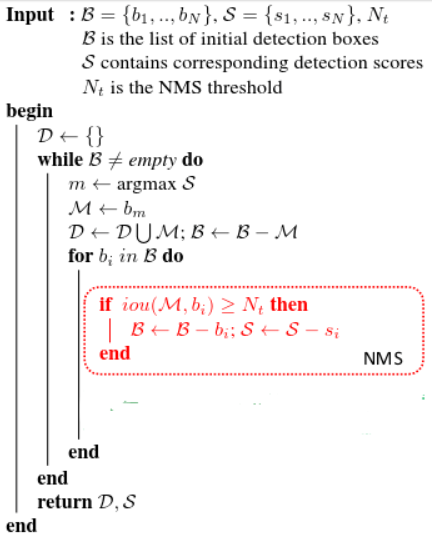
现,假设有一个候选BOXES的集合B和其对应的SCORES集合S:
1、找出分数最高的那个框M;
2、将M对应的BOX从B中删除;
3、将删除的BOX添加到集合D中;
4、从B中删除与M对应的BOX重叠区域大于阈值Nt的其他框;
5、重复上述步骤1到4。
伪代码如下:
其中Si可表述成:

源代码如下:
1、在FastRCNN中的python实现:
def nms(dets,thresh):
x1 = dets[:, 0]
y1 = dets[:, 1]
x2 = dets[:, 2]
y2 = dets[:, 3] scores = dets[:, 4]
areas = (x2 - x1 + 1) * (y2 - y1 + 1)
order = scores.argsort()[::-1] keep = []
while order.size>0:
i=order[0]
keep.append(i)
xx1=np.maximum(x1[i],x1[order[1:]])
yy1=np.maximum(y1[i],y1[order[1:]])
xx2=np.minimum(x2[i],x2[order[1:]])
yy2=np.minimum(y2[i],y2[order[1:]]) w=np.maximum(0.,xx2-xx1+1)
h=np.maximum(0.,yy2-yy1+1)
inter=w*h
iou=inter/(areas[i]+areas[order[1:]]-inter) inds=np.where(iou<=thresh)[0]
order=order[inds+1] return keep
2、在MaskRCNN中的python实现:
def non_max_suppression(boxes,scores,threshold):
'''
保留boxes的索引
boxes:[N,(y1,x1,y2,x2)],(y2,x2)可能会超过box的边界
scores:box分数的一数组
threshold:Float型,用于过滤IoU的阈值
'''
assert boxes.shape[0]>0
if boxes.dtpye.kind!='f':
boxes=boxes.astype(np.float32) #计算box面积
y1=boxes[:,0]
x1=boxes[:,1]
y2=boxes[:,2]
y3=boxes[:,3]
area=(y2-y1)*(x2-x1) #获取根据分数排序的boxes的索引(最高的排在对前面)
ixs=scores.argsort()[::-] pick=[]
while len(ixs)>0:
i=ixs[0]
pick.append(i)
iou=compute_iou(boxes[i],boxes[ixs[1:]],area[i],area[ixs[1:]])
remove_ixs=np.where(iou>threshold)[0]+1
ixs=np.delete(ixs,remove_ixs)
ixs=np.delete(ixs,0) return np.array(pick,dtype=np.int32)
3、C++实现
static void sort(int n, const float* x, int* indices)
{
// 排序函数(降序排序),排序后进行交换的是indices中的数据
// n:排序总数// x:带排序数// indices:初始为0~n-1数目 int i, j;
for (i = ; i < n; i++)
for (j = i + ; j < n; j++)
{
if (x[indices[j]] > x[indices[i]])
{
//float x_tmp = x[i];
int index_tmp = indices[i];
//x[i] = x[j];
indices[i] = indices[j];
//x[j] = x_tmp;
indices[j] = index_tmp;
}
}
} int nonMaximumSuppression(int numBoxes, const CvPoint *points,
const CvPoint *oppositePoints, const float *score,
float overlapThreshold,
int *numBoxesOut, CvPoint **pointsOut,
CvPoint **oppositePointsOut, float **scoreOut)
{ // numBoxes:窗口数目// points:窗口左上角坐标点// oppositePoints:窗口右下角坐标点
// score:窗口得分// overlapThreshold:重叠阈值控制// numBoxesOut:输出窗口数目
// pointsOut:输出窗口左上角坐标点// oppositePoints:输出窗口右下角坐标点
// scoreOut:输出窗口得分
int i, j, index;
float* box_area = (float*)malloc(numBoxes * sizeof(float)); // 定义窗口面积变量并分配空间
int* indices = (int*)malloc(numBoxes * sizeof(int)); // 定义窗口索引并分配空间
int* is_suppressed = (int*)malloc(numBoxes * sizeof(int)); // 定义是否抑制表标志并分配空间
// 初始化indices、is_supperssed、box_area信息
for (i = ; i < numBoxes; i++)
{
indices[i] = i;
is_suppressed[i] = ;
box_area[i] = (float)( (oppositePoints[i].x - points[i].x + ) *
(oppositePoints[i].y - points[i].y + ));
}
// 对输入窗口按照分数比值进行排序,排序后的编号放在indices中
sort(numBoxes, score, indices);
for (i = ; i < numBoxes; i++) // 循环所有窗口
{
if (!is_suppressed[indices[i]]) // 判断窗口是否被抑制
{
for (j = i + ; j < numBoxes; j++) // 循环当前窗口之后的窗口
{
if (!is_suppressed[indices[j]]) // 判断窗口是否被抑制
{
int x1max = max(points[indices[i]].x, points[indices[j]].x); // 求两个窗口左上角x坐标最大值
int x2min = min(oppositePoints[indices[i]].x, oppositePoints[indices[j]].x); // 求两个窗口右下角x坐标最小值
int y1max = max(points[indices[i]].y, points[indices[j]].y); // 求两个窗口左上角y坐标最大值
int y2min = min(oppositePoints[indices[i]].y, oppositePoints[indices[j]].y); // 求两个窗口右下角y坐标最小值
int overlapWidth = x2min - x1max + ; // 计算两矩形重叠的宽度
int overlapHeight = y2min - y1max + ; // 计算两矩形重叠的高度
if (overlapWidth > && overlapHeight > )
{
float overlapPart = (overlapWidth * overlapHeight) / box_area[indices[j]]; // 计算重叠的比率
if (overlapPart > overlapThreshold) // 判断重叠比率是否超过重叠阈值
{
is_suppressed[indices[j]] = ; // 将窗口j标记为抑制
}
}
}
}
}
} *numBoxesOut = ; // 初始化输出窗口数目0
for (i = ; i < numBoxes; i++)
{
if (!is_suppressed[i]) (*numBoxesOut)++; // 统计输出窗口数目
} *pointsOut = (CvPoint *)malloc((*numBoxesOut) * sizeof(CvPoint)); // 分配输出窗口左上角坐标空间
*oppositePointsOut = (CvPoint *)malloc((*numBoxesOut) * sizeof(CvPoint)); // 分配输出窗口右下角坐标空间
*scoreOut = (float *)malloc((*numBoxesOut) * sizeof(float)); // 分配输出窗口得分空间
index = ;
for (i = ; i < numBoxes; i++) // 遍历所有输入窗口
{
if (!is_suppressed[indices[i]]) // 将未发生抑制的窗口信息保存到输出信息中
{
(*pointsOut)[index].x = points[indices[i]].x;
(*pointsOut)[index].y = points[indices[i]].y;
(*oppositePointsOut)[index].x = oppositePoints[indices[i]].x;
(*oppositePointsOut)[index].y = oppositePoints[indices[i]].y;
(*scoreOut)[index] = score[indices[i]];
index++;
} } free(indices); // 释放indices空间
free(box_area); // 释放box_area空间
free(is_suppressed); // 释放is_suppressed空间 return LATENT_SVM_OK;
}
优化版:SoftNMS
NMS能解决大部分的重叠问题,但如下图的情况就无法解决,红色框和绿色框是当前的检测结果,二者的得分分别是0.95和0.80。如果按照传统的NMS进行处理,首先选中得分最高的红色框,然后绿色框就会因为与之重叠面积过大而被删掉。另一方面,NMS的阈值也不太容易确定,设小了会出现下图的情况(绿色框因为和红色框重叠面积较大而被删掉),设置过高又容易增大误检。

思路:不要简单粗暴地删除所有IOU大于阈值的框,而是降低其置信度。
伪代码如下:
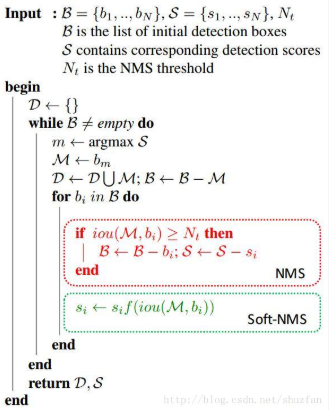
NMS可以描述如下:将IOU大于阈值的窗口的得分全部置为0。
SoftNMS改进有两种形式
一种是线性加权的:

一种是高斯加权的:
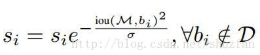
两种方法的思路都是:M为当前得分最高框,Bi是待处理框,和M的IOU越大,Bi的得分就下降的越厉害。
def cpu_soft_nms(np.ndarray[float, ndim=2] boxes, float sigma=0.5, float Nt=0.3, float threshold=0.001, unsigned int method=0):
cdef unsigned int N = boxes.shape[0]
cdef float iw, ih, box_area
cdef float ua
cdef int pos = 0
cdef float maxscore = 0
cdef int maxpos = 0
cdef float x1,x2,y1,y2,tx1,tx2,ty1,ty2,ts,area,weight,ov for i in range(N):
maxscore = boxes[i, 4]
maxpos = i tx1 = boxes[i,0]
ty1 = boxes[i,1]
tx2 = boxes[i,2]
ty2 = boxes[i,3]
ts = boxes[i,4] pos = i + 1
# get max box
while pos < N:
if maxscore < boxes[pos, 4]:
maxscore = boxes[pos, 4]
maxpos = pos
pos = pos + 1 # add max box as a detection
boxes[i,0] = boxes[maxpos,0]
boxes[i,1] = boxes[maxpos,1]
boxes[i,2] = boxes[maxpos,2]
boxes[i,3] = boxes[maxpos,3]
boxes[i,4] = boxes[maxpos,4] # swap ith box with position of max box
boxes[maxpos,0] = tx1
boxes[maxpos,1] = ty1
boxes[maxpos,2] = tx2
boxes[maxpos,3] = ty2
boxes[maxpos,4] = ts tx1 = boxes[i,0]
ty1 = boxes[i,1]
tx2 = boxes[i,2]
ty2 = boxes[i,3]
ts = boxes[i,4] pos = i + 1
# NMS iterations, note that N changes if detection boxes fall below threshold
while pos < N:
x1 = boxes[pos, 0]
y1 = boxes[pos, 1]
x2 = boxes[pos, 2]
y2 = boxes[pos, 3]
s = boxes[pos, 4] area = (x2 - x1 + 1) * (y2 - y1 + 1)
iw = (min(tx2, x2) - max(tx1, x1) + 1)
if iw > 0:
ih = (min(ty2, y2) - max(ty1, y1) + 1)
if ih > 0:
ua = float((tx2 - tx1 + 1) * (ty2 - ty1 + 1) + area - iw * ih)
ov = iw * ih / ua #iou between max box and detection box if method == 1: # linear
if ov > Nt:
weight = 1 - ov
else:
weight = 1
elif method == 2: # gaussian
weight = np.exp(-(ov * ov)/sigma)
else: # original NMS
if ov > Nt:
weight = 0
else:
weight = 1 boxes[pos, 4] = weight*boxes[pos, 4] # if box score falls below threshold, discard the box by swapping with last box
# update N
if boxes[pos, 4] < threshold:
boxes[pos,0] = boxes[N-1, 0]
boxes[pos,1] = boxes[N-1, 1]
boxes[pos,2] = boxes[N-1, 2]
boxes[pos,3] = boxes[N-1, 3]
boxes[pos,4] = boxes[N-1, 4]
N = N - 1
pos = pos - 1 pos = pos + 1 keep = [i for i in range(N)]
return keep
解释如下:

如上图,假如还检测出了3号框,而我们的最终目标是检测出1号和2号框,并且剔除3号框,原始的nms只会检测出一个1号框并剔除2号框和3号框,而softnms算法可以对1、2、3号检测狂进行置信度排序,可以知道这三个框的置信度从大到小的顺序依次为:1-》2-》3(由于是使用了惩罚,所有可以获得这种大小关系),如果我们再选择了合适的置信度阈值,就可以保留1号和2号,同时剔除3号,实现我们的功能。
遗留问题:
置信度的阈值设置目前还是手工设置,这依然存在很大局限性,所以还有改进的空间。
参考链接:
1、https://www.cnblogs.com/zf-blog/p/8532228.html
2、https://blog.csdn.net/heiheiya/article/details/81169758
目标检测后处理之NMS(非极大值抑制算法)的更多相关文章
- NMS(非极大值抑制算法)
目的:为了消除多余的框,找到最佳的物体检测的位置 思想: 选取那些领域里分数最高的窗口,同时抑制那些分数低的窗口 Soft-NMS
- 【56】目标检测之NMS非极大值抑制
非极大值抑制(Non-max suppression) 到目前为止你们学到的对象检测中的一个问题是,你的算法可能对同一个对象做出多次检测,所以算法不是对某个对象检测出一次,而是检测出多次.非极大值抑制 ...
- Non-Maximum Suppression,NMS非极大值抑制
Non-Maximum Suppression,NMS非极大值抑制概述非极大值抑制(Non-Maximum Suppression,NMS),顾名思义就是抑制不是极大值的元素,可以理解为局部最大搜索. ...
- 非极大值抑制算法(Python实现)
date: 2017-07-21 16:48:02 非极大值抑制算法(Non-maximum suppression, NMS) 算法原理 非极大值抑制算法的本质是搜索局部极大值,抑制非极大值元素. ...
- 输出预测边界框,NMS非极大值抑制
我们预测阶段时: 生成多个锚框 每个锚框预测类别和偏移量 但是,当同一个目标上可能输出较多的相似的预测边界框.我们可以移除相似的预测边界框.——NMS(非极大值抑制). 对于一个预测边界框B,模型会计 ...
- Non-maximum suppression(非极大值抑制算法)
在RCNN系列目标检测中,有一个重要的算法,用于消除一些冗余的bounding box,这就是non-maximum suppression算法. 这里有一篇博客写的挺好的: http://www.c ...
- 3分钟理解NMS非极大值抑制
1. NMS被广泛用到目标检测技术中,正如字面意思,抑制那些分数低的目标,使最终框的位置更准: 2. 假如图片上实际有10张人脸,但目标检测过程中,检测到有30个框的位置,并且模型都认为它们是人脸,造 ...
- NMS(非极大值抑制)实现
1.IOU计算 设两个边界框分别为A,B.A的坐标为Ax1,Ax2,Ay1,Ay2,且Ax1 < Ax2,Ay1 < Ay2.B和A类似. 则IOU为A∩B除以A∪B. 当两个边界框有重叠 ...
- [DeeplearningAI笔记]卷积神经网络3.6-3.9交并比/非极大值抑制/Anchor boxes/YOLO算法
4.3目标检测 觉得有用的话,欢迎一起讨论相互学习~Follow Me 3.6交并比intersection over union 交并比函数(loU)可以用来评价对象检测算法,可以被用来进一步改善对 ...
随机推荐
- 深入理解 iptables 和 netfilter 架构
[译] 深入理解 iptables 和 netfilter 架构 Published at 2019-02-18 | Last Update 译者序 本文翻译自 2015 年的一篇英文博客 A Dee ...
- PhpStorm设置项目编码
因为工作中论坛项目用的是GBK编码.数据库也是GBK编码.模板也是GBK,所以为了以后修改程序不出现乱码问题,所以需要把我的PhpStorm中该项目也设置为GBK编码(默认是UTF8编码). 设置路径 ...
- Arrange seat of a bench for people
Given a bench with n seats and few people sitting, tell the seat number each time when a new person ...
- 知识点整理-mysql怎么查看优化器优化后的sql
背景 1.新建两张表 CREATE TABLE t1 (m1 )); CREATE TABLE t2 (m2 )); 2.插入些数据 INSERT INTO t1 VALUES(, , , 'c'); ...
- python-数据库-优化
数据库的优化? 1. 优化硬件:采用SSD(固态驱动器,俗称固态硬盘),使用磁盘队列技术(RAID0,RAID1,RDID5)等: 2. 进行架构级别的缓存,静态化和分布式:(数据库-->渲染页 ...
- [学习笔记] 在Eclips 中导出项目
有时候需要将自己完成的项目分享给别人,可以按如下步骤操作: 选择要导出的内容,设置导出的文件名. 然后点击,Finish 即可. 然后到d:\tmp 会看到文件:Hibernat_demo_001.z ...
- Maven仓库介绍以及私服搭建
1 什么是Maven? 1.1 Maven的概念 Maven主要服务于基于Java平台的项目构建.依赖管理和项目信息开发,它是一个异常强大的构建工具,能够帮助我们自动化构建过程,从清理.编译.测试 ...
- Spark Scala当中reduceByKey的用法
[学习笔记] /*reduceByKey(function)reduceByKey就是对元素为KV对的RDD中Key相同的元素的Value进行function的reduce操作(如前所述),因此,Ke ...
- php 连接webservice接口
首先谢谢前人, 引用:https://www.cnblogs.com/xbxxf/p/10103430.html 本来说对接接口,我以为是一扮curl接口形式,结果最后给接口锝时候才告诉我是webse ...
- html跑马灯/走马灯效果
实现跑马灯的方法很多,其中最简单的是采用一句Html代码来实现,我们在需要出现跑马灯效果的地方插入“<marquee>滚动的文字</marquee>”语句,它的效果如下所示: ...