《视觉SLAM十四讲》学习日志(二)——初识SLAM
小萝卜机器人的例子:

就像这种机器人,它的下面有一组轮子,脑袋上有相机(眼睛),为了让它能够探索一个房间,它需要知道:
1.我在哪——定位
2.周围环境怎么样——建图
定位和建图可以理解成感知的 "内外之分",一方面要明白自身的状态(位置),另一方面要了解周围的环境(地图)。要完成这些工作,我们可以通过在房间铺设导引线,在墙上贴识别二维码,在室外可以给机器人安装定位设备,这些我们都称之为传感器,传感器分为两类:
1.携带于机器人本体上,例如相机,激光传感器等
2.安装于环境中的,例如导引线,识别二维码等。
然而大量利用这些外部传感器很明显是不现实的,抛开成本,光是在环境中铺设这些传感器就很不现实,有些地方不能铺设导轨,有些地方没有信号,相对地, 安装于机器人身上的传感器测到的都是一些间接的物理量,并不能得到直接的位置信息,我们只能通过一些间接的手段,推算出位置。虽然听起来很麻烦,但是它有一个很明显的好处就是对环境条件没有要求,适用于测量未知环境。
SLAM中非常强调未知环境,因此,谈论视觉SLAM时,主要指如何用相机解决定位和构图问题。SLAM中使用的相机是以一定速率拍摄周围的环境,形成一个连续的视频流。普通相机能以每秒钟30张的速度采集图像,按照工作方式不同,可以分为单目相机,双目相机和深度相机。
单目相机:顾名思义,只有一个摄像头,我们通常的照片就是单目摄像机拍摄的图像,以二维的形式反映了三维的世界。显然,这个过程丢掉了深度(距离),比如:

你很难分辨出手掌上的人是真人还是模型。
如果想恢复三维结构,我们必须改变相机的视角,因此必须移动相机,才能估计它的运动,同时估计场景中物体的远近和大小,不妨称之为结构,一方面,我们知道相机往右移动,图像里的东西会向左移动,另一方面,近处的物体移动快,远处的物体运动缓慢。于是,当相机移动时,这些物体在图像上的运动形成了视差。通过视差我们可以判断哪些物体离得远,哪些离得近。
现在我们知道了物体远近,但是它们仍然是相对的值,如果把相机的运动和场景大小同时放大两倍,单目相机看到的图像是一样的。因此,单目SLAM估计的轨迹和地图将与真实的轨迹和地图相差一个因子,也就是尺度。由于单目SLAM无法仅凭图像确定这个真实尺度,所以又称尺度不确定性。
平移之后才可以计算深度,以及无法确定真实尺度,这给单目SLAM的应用带来了很大麻烦。根本原因是通过单张图像无法确定深度。
双目相机:
由两个单目相机组成,这两个单目相机之间的距离(成为基线)是已知的。通过这个基线来估计每个像素的空间位置——和人眼类似。基线的距离越大,能测量到的就越远。双目相机的距离估计是比较左右眼的图像获得的,并不依赖其他传感设备。因此室内外都可以应用。它的缺点是配置与标定均比较复杂,其深度量程和精度受双目的基线与分辨率所限,而且视差的计算非常消耗计算资源,需要使用 GPU 和 FPGA 设备加速后,才能实时输出整张图像的距离信息,因此计算量是双目的主要问题之一。
深度相机:
又称 RGB-D 相机,最大的特点是可以通过红外结构光或 Time-of-Flight(TOF) 原理,像激光传感器那样,通过主动向物体发射光并接收返回的光,测出物体与相机之间的距离。
经典视觉SLAM框架:
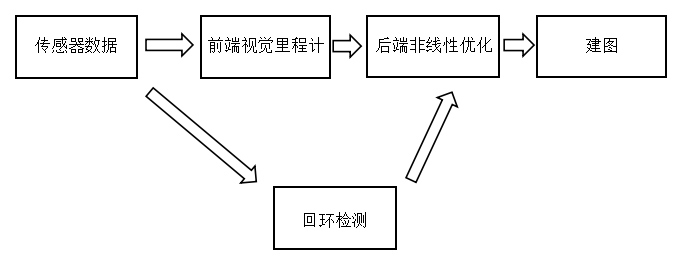
整个视觉SLAM流程包括以下步骤。
1.传感器信息读取。在视觉SLAM中主要为相机图像信息的读取和预处理。如果是在机器人中,还可能有码盘、惯性传感器等信息的读取和同步。
2.视觉里程计(Visual Odometry,VO)。视觉里程计的任务是估算相邻图像间相机的运动,以及局部地图的样子。VO又称为前端。
3.后端优化(Optimization)。后端接受不同时刻视觉里程计测量的相机位姿,以及回环检测的信息,对它们进行优化,得到全局一致的轨迹和地图,由于接在VO之后,又称后端。
4.回环检测(Loop Closing)。判断机器人是否到达过先前的位置。如果检测到回环,它会把信息提供给后端进行处理。
5.建图(Mapping)。根据估计的轨迹,建立与任务要求对应的地图。
关于SLAM问题的数学表述,在后续的博文中会提到。
小试牛刀:
1.安装Linux系统,这个不用多说。
2.编写helloSLAm.cpp。首先建一个文件夹。
$mkdir slambook
$cd slambook
$mkdir ch2
然后在ch2下写helloSLAM.cpp。
$cd ch2
$vim helloSLAM.cpp
将如下代码写入。
#include <iostream> using namespace std; int main(int argc,char** argv)
{
cout<<"Hello SLAM"<<endl;
return ;
}
先使用g++编译。
$g++ helloSLAM.cpp
确保你的机器里有g++。如果没有,请使用以下命令安装。
$sudo apt-get install g++
编译成功后,输入:
$./a.out
即可运行。
我们可以发现,g++默认把源文件编译成 a.out 。
3.使用cmake
在刚才的目录下新建一个 CMakeLists.txt 文件,输入:
#声明要求的 cmake 最低版本
cmake_minimum_required( VERSION 2.8 ) #声明一个cmake工程
project( HelloSLAM ) #添加一个可执行程序
#语法:add_executable(程序名 源代码文件)
add_executable( helloSLAM helloSLAM.cpp )
在当前目录下(slambook/ch2),调用 cmake 对该工程分析:
用 make 对工程进行编译:
$make
然后运行:
$./helloSLAM
cmake 和 g++都可以对C++文件进行编译,那么它们之间的区别是什么?
通常一个小型C++项目可能含有十几个类,各类之间还存在着复杂的依赖关系。其中一部分要编译成可执行文件,另一部分要编译成库文件。如果仅靠g++命令,需要输入大量的编译指令,整个编译过程会非常繁琐。因此对于C++项目,使用一些工程管理工具会更加高效。也就是cmake。
4.使用库
创建如下文件(slambook/ch2/libHelloSLAM.cpp):
#include <iostream> using namespace std; void printHello()
{
cout<<"Hello SLAM"<<endl;
}
这个库提供了一个printHello()函数,调用此函数将打印出一条信息,但是没有main()函数,意味着这个库中没有可执行文件,我们在CMakeLists.txt里加上如下内容:
add_library( hello libHelloSLAM.cpp)
这条命令告诉cmake,我们想把这个文件编译成一个叫做“hello”的库,然后和上面一样,编译整个工程:
$cd build
$cmake ..
$make
这时,在build文件夹中就会生成一个libhello.a文件,这就是得到的库,
Linux中,库分为静态库和共享库,静态库以.a作为后缀名,共享库以.so结尾,所有库都是一些函数打包后的集合,差别在于静态库每次被调用都会生成一个副本,而共享库只有一个副本,更省空间。如果想生成共享库,那么只需要:
add_library( hello_shared SHARED libHelloSLAM.cpp)
此时得到的就是libhello_shared.so了。
为了让别人使用这个库,我们需要提供一个头文件,说明这些库里面都有些什么,因此,对于库的使用者,只要拿到了头文件和库文件,就可以调用这个库了,下面编写libhello的头文件。
slambook/ch2/libHelloSLAM.h
#ifndef LIBHELLOSLAM_H_
#define LIBHELLOSLAM_H_
void printHello();
#endif
根据这个文件和我们刚才编译得到的库文件,就可以使用printHello()函数了,下面写一个可执行程序来调用这个简单的函数:
slambook/ch2/useHello.cpp
#include "libHelloSLAM.h" int main(int argc,char** argv)
{
printHello();
return ;
}
然后,在CMakeLists.txt中添加一个可执行程序的生成命令,链接到刚才使用的库上:
add_executable( useHello useHello.cpp )
target_link_libraries( useHello hello_shared)
5.使用IDE
关于kdevelop的安装教程请看:
http://blog.csdn.net/p942005405/article/details/75715288
《视觉SLAM十四讲》学习日志(二)——初识SLAM的更多相关文章
- 《SLAM十四讲》个人学习知识点梳理
0.引言 从六月末到八月初大概一个月时间一直在啃SLAM十四讲[1]这本书,这本书把SLAM中涉及的基本知识点都涵盖了,所以在这里做一个复习,对这本书自己学到的东西做一个梳理. 书本地址:http:/ ...
- 高博-《视觉SLAM十四讲》
0 讲座 (1)SLAM定义 对比雷达传感器和视觉传感器的优缺点(主要介绍视觉SLAM) 单目:不知道尺度信息 双目:知道尺度信息,但测量范围根据预定的基线相关 RGBD:知道深度信息,但是深度信息对 ...
- 《视觉SLAM十四讲》第2讲
目录 一 视觉SLAM中的传感器 二 经典视觉SLAM框架 三 SLAM问题的数学表述 注:原创不易,转载请务必注明原作者和出处,感谢支持! 本讲主要内容: (1) 视觉SLAM中的传感器 (2) 经 ...
- 《视觉SLAM十四讲》第1讲
目录 一 视觉SLAM 注:原创不易,转载请务必注明原作者和出处,感谢支持! 一 视觉SLAM 什么是视觉SLAM? SLAM是Simultaneous Localization and Mappin ...
- 视觉slam十四讲第七章课后习题6
版权声明:本文为博主原创文章,转载请注明出处: http://www.cnblogs.com/newneul/p/8545450.html 6.在PnP优化中,将第一个相机的观测也考虑进来,程序应如何 ...
- 视觉slam十四讲第七章课后习题7
版权声明:本文为博主原创文章,转载请注明出处:http://www.cnblogs.com/newneul/p/8544369.html 7.题目要求:在ICP程序中,将空间点也作为优化变量考虑进来 ...
- 浅读《视觉SLAM十四讲:从理论到实践》--操作1--初识SLAM
下载<视觉SLAM十四讲:从理论到实践>源码:https://github.com/gaoxiang12/slambook 第二讲:初识SLAM 2.4.2 Hello SLAM(书本P2 ...
- 视觉SLAM十四讲:从理论到实践 两版 PDF和源码
视觉SLAM十四讲:从理论到实践 第一版电子版PDF 链接:https://pan.baidu.com/s/1SuuSpavo_fj7xqTYtgHBfw提取码:lr4t 源码github链接:htt ...
- SLAM十四讲中Sophus库安装
Sophus截止目前有很多版本,其中大体分为两类,一种是用模板实现的方法,一种是用非模板类实现的,SLAM十四讲中使用的是非模板类库,clone Sophus: git clone http://gi ...
随机推荐
- centos7搭建EFK日志分析系统
前言 EFK可能都不熟悉,实际上EFK是大名鼎鼎的日志系统ELK的一个变种 在没有分布式日志的时候,每次出问题了需要查询日志的时候,需要登录到Linux服务器,使用命令cat -n xxxx|grep ...
- jvm类加载原理和类加载器介绍
虚拟机的类加载机制 在Class文件中描述的各种信息最终都需要加载到虚拟机中之后才能运行和使用. 虚拟机把描述类的数据从Class文件加载到内存,并对数据进行校验,转换解析和初始化,最终形成可以被 ...
- 可视化利器 TensorBoard
人工智能的黑盒: TensorBoard 的作用: 1.用TensorFlow保存图的信息到日志中 tfsummary.FileWriter("日志保存路径", sess.grap ...
- findstr 命令使用
findstr 命令使用 find /? 在文件中搜索字符串. FIND [/V] [/C] [/N] [/I] [/OFF[LINE]] "string" [[drive:][p ...
- nlopt 二次优化
/* * main.c * * Created on: Oct 9, 2018 * Author: lgh */ #include <stdio.h> #include <math. ...
- 抓某音乐播放器时现在多了个vkey,导致播放地址有问题,如何抓到vkey
一:在已经通过axios和vue-cli本地服express通过地址获取到songmid这个参数 在js里面地址和参数如下: // 获取歌手和歌曲的详细信息 export function getSi ...
- 为什么加了jquery mobile 会有 Loading 字样在页面底部?【已解决】
这是一个奇怪的问题,用了jquery mobile js库,页面底部就会出现Loading字样, 解决办法如下: 1,正常加上css样式 2,一定要在jquery mobile js库加载之前,设置 ...
- python采集websocket实时数据
之前大部分的数据采集基本都是http的,也一直对如何采集websocket的实时数据有疑问,不知道入从哪里入手,一筹莫展,今天在知乎上看到了一篇采集websocket的文章,讲的很透彻 终于把这个疑问 ...
- [杭电oj][1005]Number Sequence
sky同学在努力地刷题..,在这题卡住了,于是一起研究了一下... 这题本身挺简单的,(1) = 1, f(2) = 1, f(n) = (A * f(n - 1) + B * f(n - 2)) m ...
- 凌乱的yyy / 线段覆盖(贪心)
https://www.luogu.org/problemnew/show/P1803 题目链接 贪心,选择结束时间为关键字排序,相同时开始时间大的在前,然后for一遍比较就好了 #include& ...