《机器学习实战》学习笔记——第2章 KNN
一. KNN原理:
1. 有监督的学习
根据已知事例及其类标,对新的实例按照离他最近的K的邻居中出现频率最高的类别进行分类。伪代码如下:
1)计算已知类别数据集中的点与当前点之间的距离
2)按照距离从小到大排序
3)选取与当前点距离最小的k个点
4)确定这k个点所在类别的出现频率
5)返回这K个点出现频率最高的类别作为当前点的预测分类
- import numpy as np
- # 读取数据
- def file2matrix(filename):
- fr = open(filename)
- arrayLines = fr.readlines()
- numbersOfArray = len(arrayLines)
- df = np.zeros((numbersOfArray, 3))
- classLabel = []
- index = 0
- for line in arrayLines:
- # 截取掉所有的回车字符
- line = line.strip()
- # 使用\t将上一步得到的整行数据切分成一个元素列表
- listFromLine = line.split('\t')
- df[index] = listFromLine[0:3]
- classLabel.append(listFromLine[-1])
- index +=1
- return df, classLabel
- filename = '\datingTestSet.txt'
- df, classLabel = file2matrix(filename)
2. KNN缺点:
(1)KNN算法是基于实例的学习,使用算法时我们必须有接近实际数据的训练样本数据。KNN必须保存全部数据集,如果训练数据集的很大,必须使用大量的存储空间。
(2)必须对数据集中的每个数据计算距离值,耗时非常大
(3)它无法给出任何数据的基础结构信息, 因此我们无法知晓平均实例样本和典型事例样本具有什么特征
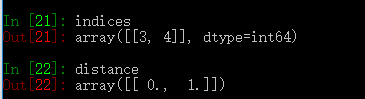
二. 使用sklearn.neighbors
- from sklearn import neighbors
- import numpy as np
- x = np.array([[-1, -1], [-2, -1], [-3, -2], [1, 1], [2, 1], [3, 2]])
- y = [1, 1]
- nbr = neighbors.NearestNeighbors(n_neighbors=2, algorithm='auto').fit(x)
- distance, indices = nbr.kneighbors(y)
结果:
最近邻算法主要分为三种:
(1)Brute Force
- 对于N个实例在D维中,枚举计算,时间复杂度:

- 随着N增加,时间消耗相当大
(2)K-D tree
1. 什么叫做K_Dtree:
K:K邻近查询中的k;D:空间是D维空间(Demension)tree:二叉树
2. 建树过程:
K-D tree的建立就是分裂空间的过程
- 首先我们来定义树节点的状态:
分裂点(split_point)
分裂方式(split_method)
左儿子(left_son)
右儿子(right_son)
- 建树依据:
先计算当前区间 [ L , R ] 中(这里的区间是点的序号区间,而不是我们实际上的坐标区间),每个点的坐标的每一维度上的方差,取方差最大的那一维,设为 d,作为我们的分裂方式(split_method ),把区间中的点按照在 d 上的大小,从小到大排序,取中间的点 sorted_mid 作为当前节点记录的分裂点,然后,再以 [ L , sorted_mid-1 ] 为左子树建树 , 以 [sorted_mid+1 , R ] 为右子树建树,这样,当前节点的所有状态我们便确定下来了:
split_point= sorted_mid
split_method= d
left_son = [ L , sorted_mid-1 ]
right_son = [ sorted_mid+1 , R ]
- 举例:
假设现在我们有平面上的点集 E ,其中有 5 个二维平面上的点 : (1,4)(5,8) (4,2) (7,9) (10,11)
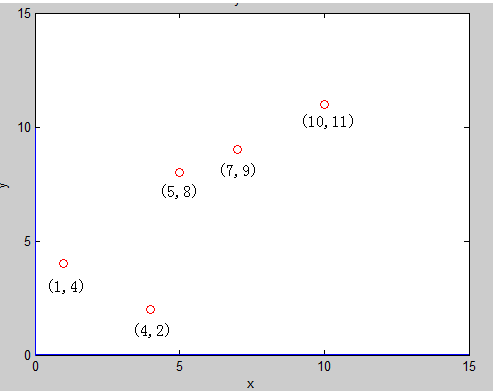
首先,我们对整个区间 [1 , 15] 建树:先计算区间中所有点在第一维(也就是 x 坐标)上的方差:
平均值 : ave_1 =5.4
方差 : varance_1 =9.04
再计算区间中所有点在第二维(也就是 y 坐标)上的方差:
平均值:ave_2 =6.8
方差:varance_2 =10.96
明显看见,varance_2 > varance_1 ,那么我们在本次建树中,分裂方式 :split_method =2 , 再将所有的点按照第2维的大小从小到大排序,得到了新的点的一个排列:
(4,2) (1,4)(5,8) (7,9) (10,11)
取中间的点作为分裂点 sorted_mid =(5,8)作为根节点,再把区间 [1 , 2] 建成左子树 , [4 , 5] 建成右子树,此时,直线 : y = 8 将平面分裂成了两半,前面一半给左儿子,后面一半给了右儿子,如图:

建左子树 [1, 3] 的时候可以发现,这时候第一维的方差大 ,分裂方式就是1 ,把区间 [ 1, 2 ] 中的点按照 第一维 的大小,从小到大排序 ,取中间点(1,4) 根节点,再以区间 [ 2, 2] 建立右子树 得到节点 (4,2)

建右子树 [4 , 5] 的时候可以发现,这时还是第一维的方差大, 于是,我们便得到了这样的一颗二叉树 也就是 K-D tree,它把平面分成了如下的小平面,使得每个小平面中最多有一个点:

3. 查询过程:
查询,其实相当于我们要将一个点“添加”到已经建好的 K-D tree 中,但并不是真的添加进去,只是找到他应该处于的子空间即可,所以查询就显得简单的。
每次在一个区间中查询的时候,先看这个区间的分裂方式是什么,也就是说,先看这个区间是按照哪一维来分裂的,这样如果这个点对应的那一维上面的值比根节点的小,就在根节点的左子树上进行查询操作,如果是大的话,就在右子树上进查询操作。
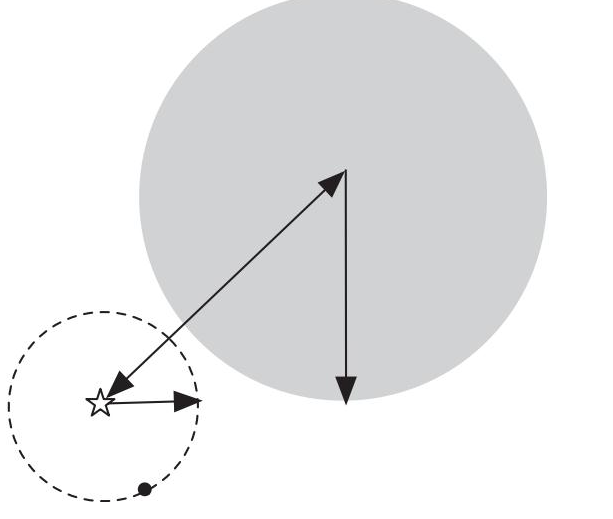
每次回溯到了根节点(也就是说,对他的一个子树的查找已经完成了)的时候,判断一下,以该点为圆心,目前找到的最小距离为半径,看是否和分裂区间的那一维所构成的平面相交,要是相交的话,最近点可能还在另一个子树上,所以还要再查询另一个子树,同时,还要看能否用根节点到该点的距离来更新我们的最近距离。为什么是这样的,我们可以用一幅图来说明:

在查询到左儿子的时候,我们发现,现在最小的距离是 r = 10 ,当回溯到父亲节点的时候,我们发现,以目标点(10,1)为圆心,现在的最小距离 r = 10 为半径做圆,与分割平面 y = 8 相交,这时候,如果我们不在父亲节点的右儿子进行一次查找的话,就会漏掉(10,9) 这个点,实际上,这个点才是距离目标点 (10,1) 最近的点
由于每次查询的时候可能会把左右两边的子树都查询完,所以,查询并不是简单的 log(n) 的,最坏的时候能够达到 sqrt(n)
4. 在对样本实例进行KD-tree算法
KD(K-dimensional tree)树形结构。KD tree是二叉树
- 原理:如果我们知道A与B非常近,B与C非常近,我们就假定认为A与C非常近,不用确切的计算出他们的距离
- 计算复杂度:

- 对参数空间沿着数据轴(N)进行划分,KDtree 很高效,因为划分过程是在参数轴(N)上进行,而不用管D实例维数
- 但是只有当D很小(D<20)的时候,运算块,当D大时,计算也会变慢
- 对于上面代码,只需修改,algorithm='KDTree'
- nbr = neighbors.NearestNeighbors(n_neighbors=2, algorithm='KDTree').fit(x)
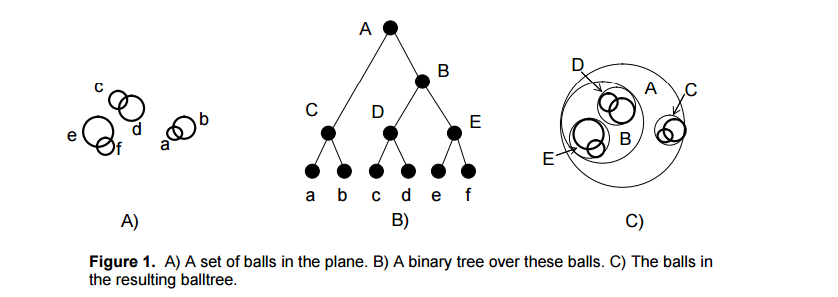
(3)Ball tree
1. 原理:
为了改进KDtree的二叉树树形结构,并且沿着笛卡尔坐标进行划分的低效率,ball tree将在一系列嵌套的超球体上分割数据。也就是说:使用超球面而不是超矩形划分区域。虽然在构建数据结构的花费上大过于KDtree,但是在高维甚至很高维的数据上都表现的很高效。
球树递归地将数据划分为由质心C和半径r定义的节点,使得节点中的每个点都位于由r和C定义的超球内。通过使用三角不等式来减少邻居搜索的候选点数量的

2. 划分
选择一个距离当前圆心最远的观测点i1,和距离i1最远的观测点 i2,将圆中所有离这两个点最近的观测点都赋给这两个簇的中心,然后计算每一个簇的中心点和包含所有其所属观测点的最小半径。对包含n个观测点的超圆进行分割,只需要线性的时间。
3. 查询
使用ball tree时,先自上而下找到包含target的叶子结点(c, r),从此结点中找到离它最近的观测点。这个距离就是最近邻的距离的上界。检查它的兄弟结点中是否包含比这个上界更小的观测点。方法是:如果目标点距离兄弟结点的圆心的距离 > 兄弟节点所在的圆半径 + 前面的上界的值,则这个兄弟结点不可能包含所要的观测点。否则,检查这个兄弟结点是否包含符合条件的观测点。
如果:该点的最近距离上确界+兄弟节点的半径 > 该点到兄弟节点圆心的距离,则表明构成了三角形,两个圆必然相交
4. 在对样本实例进行ball tree算法
- 对于上面代码,只需修改,algorithm='ball_tree'
- nbr = neighbors.NearestNeighbors(n_neighbors=2, algorithm='ball_tree').fit(x)
(4)选择何种算法
1. 各算法时间复杂度:N:样本数量,D:特征向量
- Brute force query time grows as

- Ball tree query time grows as approximately

- KD tree query time changes with
 in a way that is difficult to precisely characterise. For small (less than 20 or so) the cost is approximately
in a way that is difficult to precisely characterise. For small (less than 20 or so) the cost is approximately  , and the KD tree query can be very efficient. For larger , the cost increases to nearly
, and the KD tree query can be very efficient. For larger , the cost increases to nearly  , and the overhead due to the tree structure can lead to queries which are slower than brute force.
, and the overhead due to the tree structure can lead to queries which are slower than brute force.
对于小数据集(N小于30左右), log(N)可以与N比较,并且强力算法可以比基于树的方法更有效。KDTree和BallTree都通过提供叶大小参数来解决这个问题:这控制了查询切换到暴力的样本数。 这允许两个算法接近小于N的强力计算的效率。
2. 数据结构:
数据的内在维度或数据的稀疏性。 内在维度是指数据所在的D,其可以线性地或非线性地嵌入参数空间中。 稀疏性指的是数据填充参数空间的程度(这与“稀疏”矩阵中使用的概念区分开来。数据矩阵可以没有零项,但是结构在这个项中仍然可以是“稀疏的” )。
- 强制查询时间根据数据结构不变。
- ball tree和KD树查询时间会受到数据结构的很大影响。 一般来说,具有较小固有维度的稀疏数据导致更快的查询时间。 由于KD树内部表示与参数轴对齐,因此对于任意结构化数据,它通常不会显示与ball tree相同的改进。
机器学习中使用的数据集往往是非常结构化的,非常适合基于树的查询。
3. 可以自动选择:
- nbr = neighbors.NearestNeighbors(n_neighbors=2, algorithm='auto').fit(x)
目前,如果k <N / 2并且'effective_metric_'在'kd_tree'的'VALID_METRICS'列表中,algorithm ='auto'选择'kd_tree'。 如果k <N / 2并且'effective_metric_'不在'kd_tree'的'VALID_METRICS'列表中,它选择'ball_tree'。 如果k> = N / 2,则选择“brute”。 该选择基于如下假设:查询点的数量至少与训练点的数量相同,并且该leaf_size接近其默认值30。
《机器学习实战》学习笔记——第2章 KNN的更多相关文章
- 【机器学习实战学习笔记(1-1)】k-近邻算法原理及python实现
笔者本人是个初入机器学习的小白,主要是想把学习过程中的大概知识和自己的一些经验写下来跟大家分享,也可以加强自己的记忆,有不足的地方还望小伙伴们批评指正,点赞评论走起来~ 文章目录 1.k-近邻算法概述 ...
- 【机器学习实战学习笔记(2-2)】决策树python3.6实现及简单应用
文章目录 1.ID3及C4.5算法基础 1.1 计算香农熵 1.2 按照给定特征划分数据集 1.3 选择最优特征 1.4 多数表决实现 2.基于ID3.C4.5生成算法创建决策树 3.使用决策树进行分 ...
- <机器学习实战>读书笔记--k邻近算法KNN
k邻近算法的伪代码: 对未知类别属性的数据集中的每个点一次执行以下操作: (1)计算已知类别数据集中的点与当前点之间的距离: (2)按照距离递增次序排列 (3)选取与当前点距离最小的k个点 (4)确定 ...
- 【机器学习实战学习笔记(1-2)】k-近邻算法应用实例python代码
文章目录 1.改进约会网站匹配效果 1.1 准备数据:从文本文件中解析数据 1.2 分析数据:使用Matplotlib创建散点图 1.3 准备数据:归一化特征 1.4 测试算法:作为完整程序验证分类器 ...
- 机器学习实战 - 读书笔记(13) - 利用PCA来简化数据
前言 最近在看Peter Harrington写的"机器学习实战",这是我的学习心得,这次是第13章 - 利用PCA来简化数据. 这里介绍,机器学习中的降维技术,可简化样品数据. ...
- 机器学习实战 - 读书笔记(12) - 使用FP-growth算法来高效发现频繁项集
前言 最近在看Peter Harrington写的"机器学习实战",这是我的学习心得,这次是第12章 - 使用FP-growth算法来高效发现频繁项集. 基本概念 FP-growt ...
- 机器学习实战 - 读书笔记(11) - 使用Apriori算法进行关联分析
前言 最近在看Peter Harrington写的"机器学习实战",这是我的学习心得,这次是第11章 - 使用Apriori算法进行关联分析. 基本概念 关联分析(associat ...
- 机器学习实战 - 读书笔记(07) - 利用AdaBoost元算法提高分类性能
前言 最近在看Peter Harrington写的"机器学习实战",这是我的学习笔记,这次是第7章 - 利用AdaBoost元算法提高分类性能. 核心思想 在使用某个特定的算法是, ...
- Stealth视频教程学习笔记(第二章)
Stealth视频教程学习笔记(第二章) 本文是对Unity官方视频教程Stealth的学习笔记.在此之前,本人整理了Stealth视频的英文字幕,并放到了优酷上.本文将分别对各个视频进行学习总结,提 ...
随机推荐
- 完成一段简单的Python程序,用于实现一个简单的加减乘除计算器功能
#!/bin/usr/env python#coding=utf-8'''完成一段简单的Python程序,用于实现一个简单的加减乘除计算器功能'''try: a=int(raw_input(" ...
- How to Allow MySQL Client to Connect to Remote MySql
How to Allow MySQL Client to Connect to Remote MySQ By default, MySQL does not allow remote clients ...
- lumen 登陆 注册 demo
本文将用Lumen来实现一个完整的用户注册.登录及获取用户信息的API. Lumen环境搭建和初始化详细步骤请参考上篇文章<Lumen安装配置使用入门>一文. 一.准备工作 1.Lumen ...
- ADF_Starting系列8_使用EJB/JPA/JSF通过ADF构建Web应用程序之扩展UI Method
2013-05-01 Created By BaoXinjian
- [EventBus源码解析] 订阅者处理消息的四种ThreadMode
前言 在前面,我们探讨了如何在自己的代码中引入EventBus,进行基本的事件分发/监听:对注册观察者与事件发送的过程进行了浅析.从之前的学习中,我们了解到,EventBus一共有4种onEvent方 ...
- VBA_Excel_教程:表,格
Sub 表和格() '定义工作表 Dim ws As Worksheet 'get sheet by name[看到的表名,或序号1,2,3,...],要加Set Set ws = Worksheet ...
- 使用opencv设置图像的格式以及帧率
最近楼主正在写一个关于图像存储的程序,LZ有一颗求知心,想要了解保存的图像的格式以及获取摄像头帧率.晚些时候会写一篇关于opencv获取摄像头并且保存每帧图像信息方法. 1.修改图像的像素显示: 首先 ...
- 【T电商 3】Nginx的Http(图片)服务器配置+ftp上传使用说明
在前两篇博客中提到了搭建Nginx和Ftp服务器,在本篇博客,主要是介绍Nginx的配置文件的使用,怎样修改配置文件使其成为一个图片服务器. 一.Nginx图片服务器配置 <span style ...
- 纸上谈兵:伸展树(splay tree)
作者:Vamei 出处:http://www.cnblogs.com/vamei 欢迎转载,也请保留这段声明.谢谢! 我们讨论过,树的搜索效率与树的深度有关.二叉搜索树的深度可能为n,这种情况下,每次 ...
- javascript立即执行函数 (function(){})()
看到一段代码: (function(){ var outer = $('#subject'); outer.find('li').on('mouseover', mouseover); })() ( ...