STM32F103ZET6通用定时器的输入捕获
1、通用定时器输入捕获功能简介
通用定时器的输入捕获模式可以用来测量脉冲宽度或者测量频率。
STM32的每个通用定时器都有4个输入捕获的通道,分别是TIMx_CH1、TIMx_CH2、TIMx_CH3、TIMx_CH4。
STM32通过检测通道上的边沿信号,在边沿信号发生变化时(上升沿或下降沿变化),将当前定时器计数器的值(寄存器TIMx_CNT的值)存放到对应通道的捕获/比较寄存器TIMx_CCRx里面,通过记录两次边沿信号的时间,来计算脉冲宽度或频率。
2、通用定时器输入捕获详解
通用定时器框图如下:
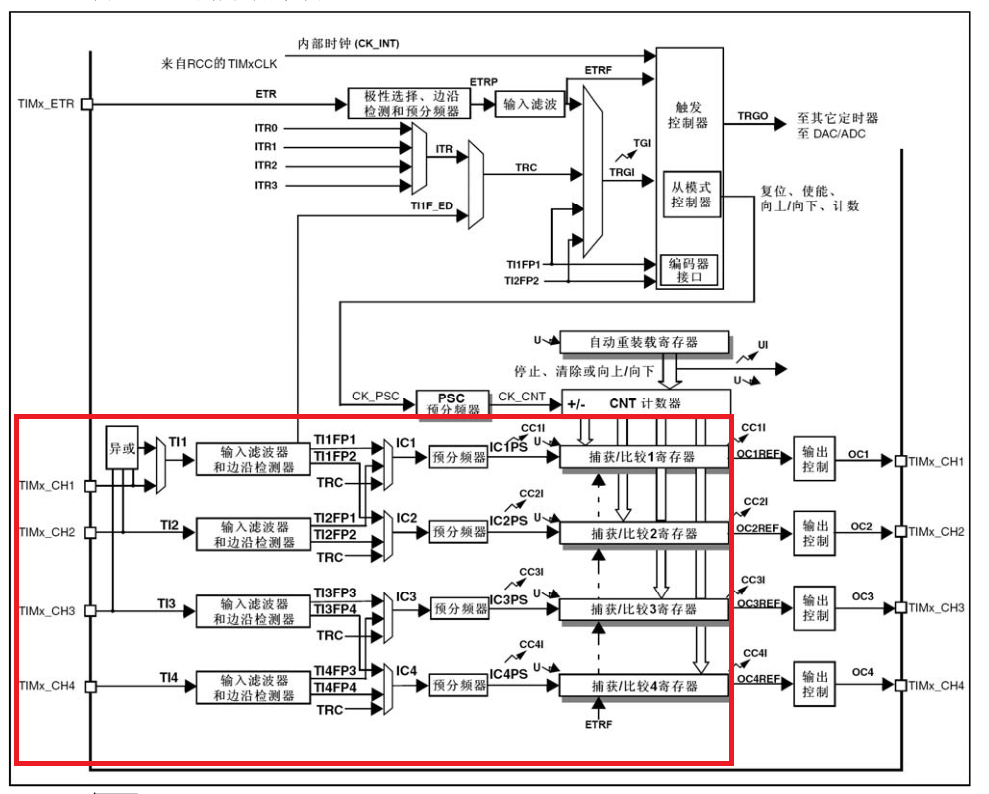
图中红色框部分就是通用定时器的输入捕获功能。
TIMx_CH1、TIMx_CH2、TIMx_CH3、TIMx_CH4分别对应通用定时器的4个输入捕获通道。
从通用定时器框图可以看到每路输入捕获通道的结构都是差不多的。
以CH1为例,通用定时器通过TIMx_CH1脚位产生信号TI1,TI1经过滤波器后,将信号传输给边沿检测器,边沿检测器检测到准确的边沿信号之后,产生TI1FP1和TI1FP2信号(这两个信号其实是一样的,只是输出的路径不一样),TI1FP1信号提供给IC1,IC1经过预分频器之后,产生捕获信号,这时候定时器计数器的当前值被锁存到捕获/比较寄存器中,而且TIMx_SR状态寄存器的CC1IF标志位被置1,如果使能了通道1输入捕获的中断功能,就会产生中断。
在红色的框图中,TI1的输入可以选择TIMx_CH1、TIMx_CH2、TIMx_CH3这3个通道的异或,这个功能好像是高级定时器的霍尔传感器功能,这里不用管,用作输入捕获功能的时候T1就默认选择TIMx_CH1输入就好。
输入滤波器:
输入捕获通道通过设置TIMx_CCMRx捕获/比较模式寄存器的ICxF[3:0]位来配置滤波器。
这里需要注意的是,输入捕获有4个通道,而捕获/比较模式寄存器只有两个,分别是TIMx_CCMR1和TIMx_CCMR2,通道1由TIMx_CCMR1的低8位配置;通道2由TIMx_CCMR1的高8位配置;通道3由TIMx_CCMR2的低8位配置;通道4由TIMx_CCMR2的高8位配置。
还要注意的是,捕获/比较模式寄存器在不同状态下时,配置的功能是不一样,如果通道被配置成输出,那么捕获/比较模式寄存器是用来配置输出功能;如果通道被配置成输入,则捕获/比较模式寄存器是用来配置输入功能。捕获/比较模式寄存器TIMx_CCMRx的CCxS[1:0]位用来配置通道是输出还是输入。当CCxS[1:0] = 00时,通道被配置为输出。当CCxS[1:0] != 0时,通道被配置为输入。
下图是通道1的IC1F[3:0]位的寄存器说明图:

图中的FCK_INT是定时器的输入频率,一般是MCU的主频(要看具体的设置)。而FDTS是根据TIMx_CR1控制寄存器的bit9~bit8位CKD[1:0]的值来确定:
当CKD = 00时,FDTS = FCK_INT。
当CKD = 00时,FDTS = 2*FCK_INT。
当CKD = 00时,FDTS = 4*FCK_INT。
图中的N是指滤波长度,假设IC1F[3:0] = 0011,并设置IC1映射到通道1上,且为上升沿触发,那么在捕获到上升沿的时候,再以FCK_INT的频率,连续采样8次通道1的电平,如果都是高电平,则说明这是一个有效的触发信号。
滤波器可以滤除哪些脉宽低于一定时间的脉冲信号,从而达到滤波的效果,当然也可以选择不滤波。
边沿检测器:
边沿检测器可以检测信号是上升沿还是下降沿,只有跟设定的边沿对得上的信号才能触发输入捕获功能。
边沿检测器可以设定为上升沿触发或是下降沿触发,这是通过捕获/比较使能寄存器TIMx_CCER的CCxP位来选择的。
同样CCxP的位在通道位输入和输出是具有不同的配置功能。当通道设为输入时,CCxP用来设置边沿检测器。
当CCxP = 0是,输入捕获是在上升沿的时候触发。
当CCxP = 1时,输入捕获是在下降沿的时候触发。
TIxFPx信号:
从通用定时器框图中可以看到,信号在经过输入滤波器和边沿检测器之后,每个通道都会产生2个信号:
通道1:TI1FP1和TI1FP2。
通道2:TI2FP1和TI2FP2
通道3:TI3FP1和TI3FP2
通道4:TI4FP1和TI4FP2
其实TIxFP1和TIxFP2的信号是同一个,但是他们输出的方向不一样,所以用不同的名称来区分,从图中可以看出:
TI1FP1作为输入源提供给IC1,而TI1FP2作为输入源提供给IC2。
TI2FP1作为输入源提供给IC2,而TI2FP2作为输入源提供给IC1。
TI3FP1作为输入源提供给IC3,而TI3FP2作为输入源提供给IC4。
TI4FP1作为输入源提供给IC4,而TI4FP2作为输入源提供给IC3。
也就是说TIMx_CH1和TIMx_CH2的输入信号是可以交互到IC1和IC2的;TIMx_CH3和TIMx_CH4的输入信号也可以交互到IC3和IC4。
具体ICx的输入源的选择是通过捕获/比较寄存器TIMx_CCMRx的CCxS[1:0]位决定的,比如IC1的输入源的选择:
当CC1S[1:0] = 00时,通道1被配置为输出。
当CC1S[1:0] = 01时,通道1被配置为输入,IC1的输入源选择TI1FP1。
当CC1S[1:0] = 10时,通道1被配置为输入,IC1的输入源选择TI2FP2。
当CC1S[1:0] = 11时,通道1被配置为输入,IC1的输入源选择TRC。
其它通道的配置也是类似的,可以参照着查看参考手册。
预分频器:
输入捕获的预分频器是通过TIMx_CCMRx的ICxPSC[1:0]位配置的。
当ICxPSC[1:0] = 00时,无预分频,捕获输入口上检测到的灭一个边沿都触发一次捕获。
当ICxPSC[1:0] = 01时,捕获输入口上检测到2个边沿才触发一次捕获。
当ICxPSC[1:0] = 10时,捕获输入口上检测到4个边沿才触发一次捕获。
当ICxPSC[1:0] = 11时,捕获输入口上检测到8个边沿才触发一次捕获。
捕获输入中断:
当输入捕获成功之后,计数器的值(TIMx_CNT)被传送到TIMx_CCRx寄存器,并且状态寄存器TIMx_SR的相应通道位CCxIF标志被置位,如果相应的中断使能控制位被置位,则会产生中断。
当CCxIF标志位被置位时,如果不清楚CCxIF标志位,则再次捕获成功之后,会将状态寄存器TIMx_SR的相应通道位CCxOF置位,指示通道重复捕获。
3、通用定时器输入捕获的配置流程
首先需要先打开定时器和通道IO口的时钟。将通道IO口配置成复用输入,具体是配置成上拉输入或下拉输入还是悬空,根据具体需求来设定。
设置定时器的计数频率,当产生捕获时,用来计时,需要注意定时器溢出的问题,当定时器溢出之后,会清除定时器计数器的值(向上计数)或重新赋值初值(向下计数),在计算捕获时间的时候,如果有溢出,需要加上溢出的时间。
通过捕获/比较模式寄存器TIMx_CCMRx配置通道为输入模式,配置映射关系(即选择ICx的输入源),配置滤波器,配置输入捕获的预分频器。
通过捕获/比较使能寄存器TIMx_CCER来选择输入捕获的边沿信号,是上升沿触发还是下降沿触发。在使用输入捕获功能之前,必须先使能,而输入捕获的使能是通过置位捕获/比较使能寄存器TIMx_CCER的相应位来实现的。
通过DMA/中断使能寄存器TIMx_DIER使能相应的中断。
最后通过控制寄存器TIMX_CR1使能定时器,让定时器开始计数。
4、HAL库操作通用定时器的输入捕获功能
以配置TIM3的通道1为例,TIM3的通道1对应的脚位是PA6,初始化代码如下:
TIM_HandleTypeDef TIM3_Handler_Init;
TIM_IC_InitTypeDef CAPTURE_Handler_Init; void CAPTURE_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct; __HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_TIM3_CLK_ENABLE(); GPIO_InitStruct.Pin = GPIO_PIN_6;
GPIO_InitStruct.Mode = GPIO_MODE_AF_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLDOWN;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); TIM3_Handler_Init.Instance = TIM3;
TIM3_Handler_Init.Init.Prescaler = -; //分频为1MHZ
TIM3_Handler_Init.Init.Period = ; //定时50ms
TIM3_Handler_Init.Init.CounterMode = TIM_COUNTERMODE_UP;
HAL_TIM_Base_Init(&TIM3_Handler_Init); CAPTURE_Handler_Init.ICPolarity = TIM_ICPOLARITY_RISING;
CAPTURE_Handler_Init.ICPrescaler = TIM_ICPSC_DIV1;
CAPTURE_Handler_Init.ICSelection = TIM_ICSELECTION_DIRECTTI;
CAPTURE_Handler_Init.ICFilter = ;
HAL_TIM_IC_ConfigChannel(&TIM3_Handler_Init,&CAPTURE_Handler_Init,TIM_CHANNEL_1); HAL_TIM_IC_Start_IT(&TIM3_Handler_Init,TIM_CHANNEL_1); HAL_TIM_IC_Start(&TIM3_Handler_Init,TIM_CHANNEL_1); HAL_NVIC_SetPriority(TIM3_IRQn,,);
HAL_NVIC_EnableIRQ(TIM3_IRQn);
}
第1、2行是定义TIM3和输入捕获的句柄变量。
第6到第15行是打开TIM3和IO口的时钟,并且配置IO口的状态。
第17到第21行是配置TIM3的计数时钟(多少时间计数器计数一次)、计数周期(多久溢出)和计数方式(向上或向下或中央对齐模式)。
第23行是选择边沿触发信号,这里选上升沿触发。
第24行是选择输入捕获分频器的系数,这里选择1分频,也就是不分频。
第25行是选择通道的映射,即选择ICx的输入源,这里选择TI1作为IC1的输入源。
第26行是选择输入捕获的滤波器,这里选择不滤波。
第27行是通过HAL_TIM_IC_ConfigChannel()函数初始化相应的输入捕获通道。
第29行是通过HAL_TIM_IC_Start_IT()函数使能输入捕获的中断功能,如果不使能则无法进入中断。
第31行是通过HAL_TIM_IC_Start()函数使能输入捕获功能,这样输入捕获的功能才会被打开,这个函数还是能了通用定时器,让通用定时器开始工作。
STM32F103ZET6通用定时器的输入捕获的更多相关文章
- STM32(9)——通用定时器作为输入捕捉
通用定时器作为输入捕获的使用.我们将用 TIM5 的通道 1 (PA0)来做输入捕获,捕获 PA0 上高电平的脉宽(用 WK_UP 按键输入高电平),通过串口打印高电平脉宽时间 输入捕获简介 输入捕获 ...
- STM32F103ZET6通用定时器
1.通用定时器简介 通用定时器是由一个可编程预分频器驱动的16位自动装载计数器构成.通用定时器可以应用于多种场合,如测量输入信号的脉冲长度(输入捕获)或者产生输出波形(输出比较和PWM).使用通用定时 ...
- STM32使用定时器实现输入捕获
输入捕获简介输入捕获模式可以用来测量脉冲宽度或者测量频率.STM32的定时器,除了TIM6和TIM7,其他定时器都有输入捕获功能. STM32的输入捕获,简单地说就是通过检测TIMx_CHx上的边沿信 ...
- STM32 HAL库学习系列第7篇---定时器TIM 输入捕获功能
测量脉冲宽度或者测量频率 基本方法 1.设置TIM2 CH1为输入捕获功能: 2.设置上升沿捕获: 3.使能TIM2 CH1捕获功能: 4.捕获到上升沿后,存入capture_buf[0], ...
- STM32 HAL库学习系列---定时器TIM 输入捕获功能
基本方法 1.设置TIM2 CH1为输入捕获功能: 2.设置上升沿捕获: 3.使能TIM2 CH1捕获功能: 4.捕获到上升沿后,存入capture_buf[0],改为捕获下降沿: 5.捕获到下降沿后 ...
- stm32 输入捕获
根据定时器的计数频率,我们就可以算出t1-t2的时间,从而得到高电平脉宽 计算公式 N * ARR + CCRx2 首先设置定时器通道为上升沿捕获,这样在t1时刻,就会捕获到当前的CNT值,然后立即清 ...
- (stm32f103学习总结)—输入捕获模式
一.输入捕获介绍 在定时器中断实验章节中我们介绍了通用定时器具有多种功能,输入捕获就是其中一种.STM32F1 除了基本定时器 TIM6 和 TIM7,其他定时器都具有输入捕获功能.输入捕获可以对输入 ...
- [置顶]
STM32 输入捕获的脉冲宽度及频率计算
输入捕获模式可以用来测量脉冲宽度或者测量频率.STM32 的定时器,除了 TIM6 和 TIM7,其他定时器都有输入捕获功能.以下是对脉冲宽度及频率的计算. 1.脉冲宽度 如下图所示,采集该高电平脉冲 ...
- STM32 输入捕获的脉冲宽度及频率计算
输入捕获模式可以用来测量脉冲宽度或者测量频率.STM32 的定时器,除了 TIM6 和 TIM7,其他定时器都有输入捕获功能.以下是对脉冲宽度及频率的计算. 1.脉冲宽度 如下图所示,采集该高电平脉冲 ...
随机推荐
- IoT设备实践丨如果你也在树莓派上部署了k3s,你也许需要这篇文章
前 言 树莓派是一种广泛流行的开发板,随着物联网的深入发展,树莓派大有成为IoT终端设备标准之趋势.在支持客户在IoT场景中落地k3s时,k3s在树莓派上的部署问题也就出现了.本文记录了一些其中的关键 ...
- 音频相关 ALSA ffmpeg ffplay 命令用法 g7xx
采样率: samples 441100 每秒 DAC/ADC 采样的频率,声卡一般还支持 48k 8k 等模式. 通道:channels 2声道 左右声道 也有单声道的声音,5.1 声道 位数: 16 ...
- linux下 GUI 数码相册项目 持续更新中
GITHUB: https://github.com/nejidev/digital_photo_album 本项目,是部分参考别人的项目,是全新从0编写的.算法实现和别人肯定是不同的,github ...
- Sublime text 3 运行python3
要在Sublime text3编译器中成功运行 python3,需要在编译器设置中将python3添加至编译器中 新建编译系统 编辑弹出的文件,添加如下内容: { "cmd":[& ...
- 数据结构 5 哈希表/HashMap 、自动扩容、多线程会出现的问题
上一节,我们已经介绍了最重要的B树以及B+树,使用的情况以及区别的内容.当然,本节课,我们将学习重要的一个数据结构.哈希表 哈希表 哈希也常被称作是散列表,为什么要这么称呼呢,散列.散列.其元素分布较 ...
- MySQL记录操作(增删改)
概览 MySQL数据操作: DML 在MySQL管理软件中,可以通过SQL语句中的DML语言来实现数据的操作,包括 使用INSERT实现数据的插入 UPDATE实现数据的更新 使用DELETE实现数据 ...
- 《前端之路》- TypeScript(二) 函数篇
目录 一.定义函数方法 二.定义函数传参 三.可选传参 四.默认传参 五.传递剩余参数 六.函数重载 七.箭头函数 八.总结 一.定义函数方法 在 es5 中定时函数的方法有 命名函数和函数表达式(匿 ...
- vue-element-admin中是如何配置浏览器中的页面标题
因为在vue-element-admin中杈哥是写个一个动态路由标题,就是说你点进那个页面,它会显示对应页面的标题,所以我们仅仅在index页面进行修改是没有用的,那么我们改如何修改呢? 找到perm ...
- java第一次上机练习作业
1.已知a,b均是整型变量,写出将a,b两个变量中的值互换的程序.(知识点:变量和 运算符综合应用) int a = 5, b = 10; int temp; temp = a; a = b; b = ...
- JDBC工具类实现登陆验证-Java(新手)
JDBC工具类: package cn.chuang.JdbcDome; import java.sql.*; public class JdbcUtilss { private static fin ...