在slam_gmapping中使用Log数据创建地图
本文介绍使用机器人记录的tf变换和激光扫描数据来建立2D地图.并在ROS的图形化模拟环境rviz中通过重新回放记录的数据作为机器人真实传感器采集的输入,来观测地图动态创建过程.
1.ROS gmapping工具
ROS提供的gmapping包是用来生成地图的,它是对著名的开源openslam包在ROS框架下的一个实现.这个包提供了对激光设备的slam,根据激光设备的输入和姿态数据从而建立一个基于网格的2D地图.它需要从ROS系统监听许多Topic,并输出一个Topic,即map(nav_msgs/OccupancyGrid),这也是Rviz的输入Topic.
下载这个包的命令如下:sudo apt-get install ros-indigo-slam-gmapping
2.硬件要求
本文采用的是模拟数据,不需要任何硬件需要.
gmapping需要使用实际的机器人获取激光或者深度数据.通常这些激光距离探测器价格比较昂贵,ROS推荐使用的SCIP2.2, Hokuyo Model 04LX, 30LX ,SICK LMS2xx Lasers 价格都巨贵无比,而且尺寸都较大。ROS使用的廉价机器人TurtleBot使用的则是深度相机Kinnect来模拟,其价格在接近千元.
3.数据包准备过程
1)数据包的准备
下载ROS提供的激光数据采集记录文件
wget http://pr.willowgarage.com/data/gmapping/basic_localization_stage.bag
2)使用机器人创建自己的bag包
a)给机器人安装激光器,确保可以发布变换数据,且可以遥控操作
b)启动扫描和变换数据记录
rosbag record -O mylaserdata /base_scan /tf
当前目录将创建一个名为mylaserdata_<DATE>-topic.bag的文件
c)让机器人动起来
d)kill掉rosbag用户可以看到记录文件已经创建
4.操作过程
1)启动节点管理器master
roscore
2)配置ROS启用重放数据中的时间而非本机时间,影响整个系统所有时间API的输出结果.在默认情况下,ROS使用ubuntu系统的时间,也就是墙上时钟时间(wall clock).但我们重播一个记录历史文件时,里面记录的是历史时间,所以我们需要告诉ROS从现在起开始启用模拟时间.
rosparam set use_sim_time true
3)运行slam_gmapping节点,它将在base_scan主题上监听激光扫描数据并创建地图,base_scan是模拟器rosbag发布的.
Note:在PR2上里程坐标系名字为odom_combined
命令为:rosrun gmapping slam_gmapping scan:=base_scan _odom_frame:=odom_combined
4)重新打开一个终端,使用模拟器rosbag启动bag包回放,将数据提供给slam_gmapping节点.
rosbag play --clock basic_localization_stage.bag
5)启动rviz,在左下方选择add,然后选择map,创建一副空地图;接着指定rviz的topic为/map可以监听到地图数据
rosrun rviz rviz

6)使用map_server功能包的map_saver保存新地图到磁盘(等rosbag结束后)
rosrun map_server map_saver -f my_map
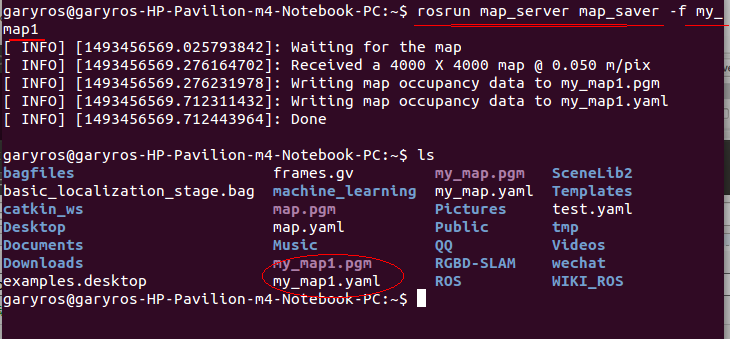
此时可以看到本地地图map.gpm已经生成,可以用图像浏览器(gimp, eog, gthumb, 等等)打开查看。例如eog my_map1.pgm
注意:最后别忘了重新设置use_sim_time参数,即使用命令:rosparam set use_sim_time false
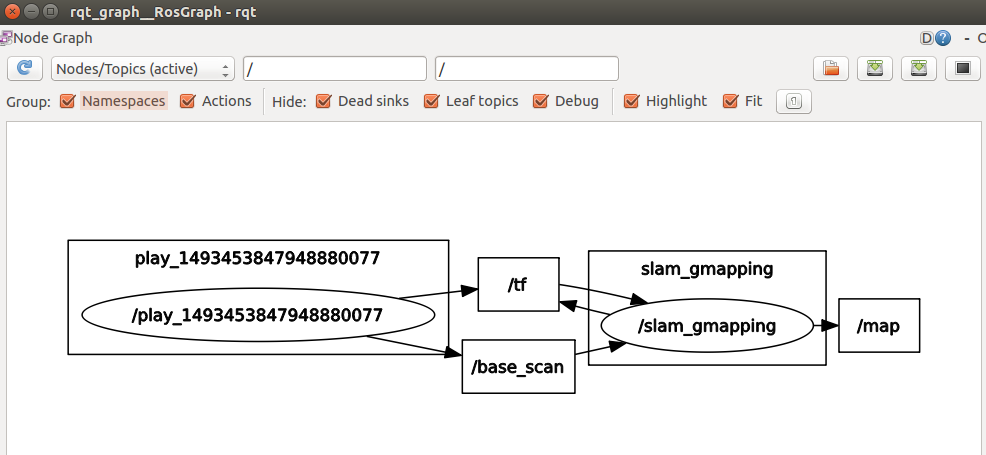
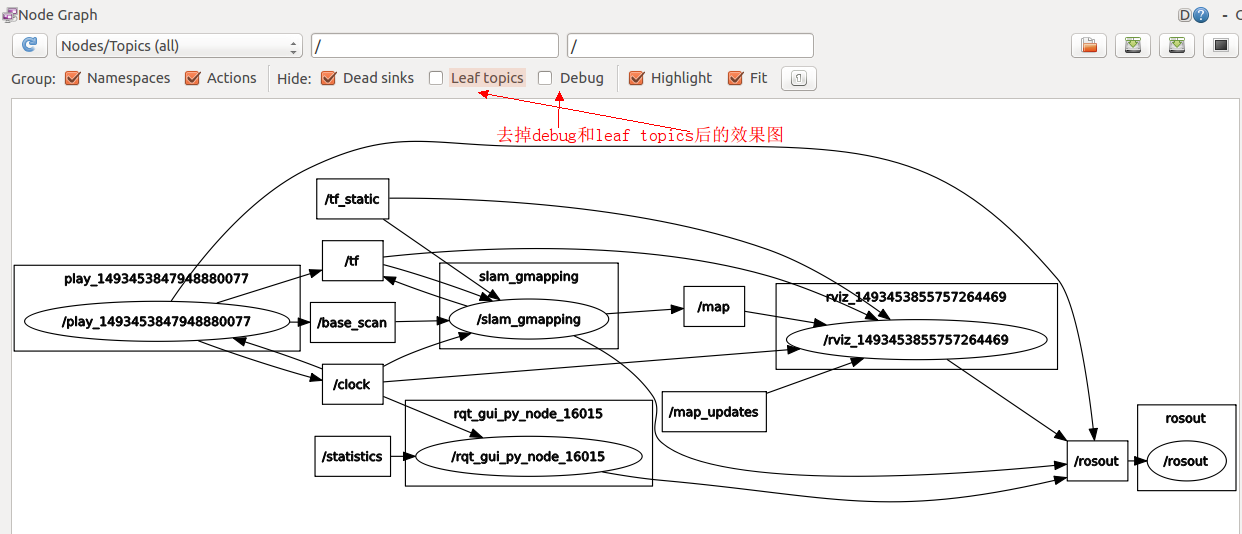
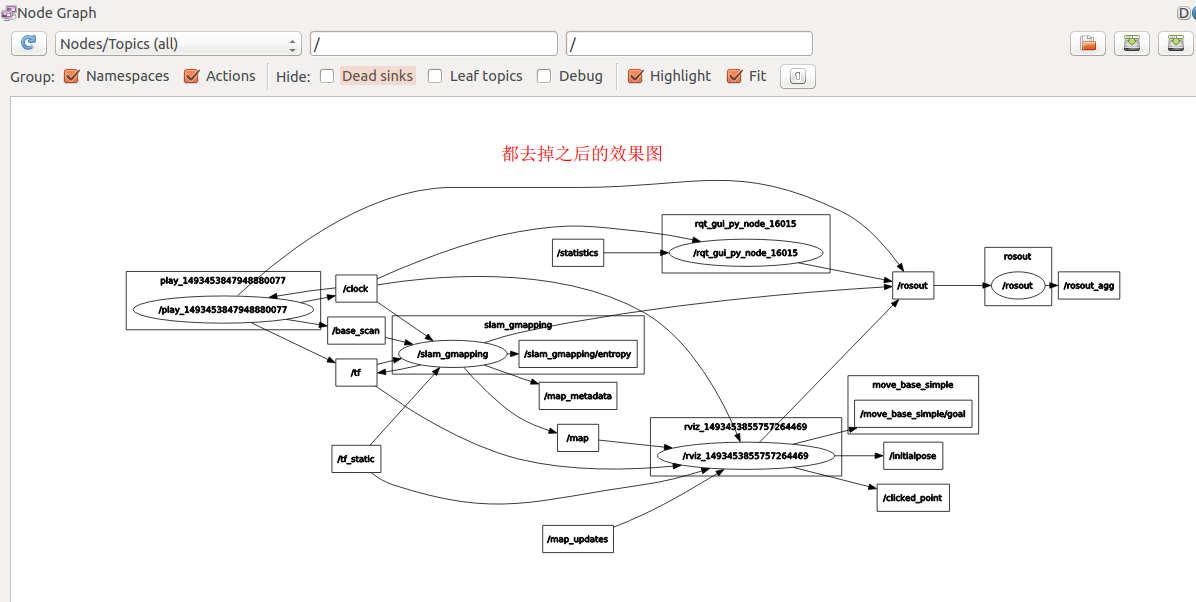
5.下面来看一下显示的节点图
1.
2.
3.
4.
5.
6.
查看它的服务和话题
在slam_gmapping中使用Log数据创建地图的更多相关文章
- 在 SharePoint 2013 中针对地理位置字段创建地图视图
在 SharePoint 2013 中针对地理位置字段创建地图视图 了解如何通过在 SharePoint 2013 列表中使用地图视图来显示位置信息.您可以通过 SharePoint 用户界面 (UI ...
- 创建一个欢迎 cookie 利用用户在提示框中输入的数据创建一个 JavaScript Cookie,当该用户再次访问该页面时,根据 cookie 中的信息发出欢迎信息。
创建一个欢迎 cookie 利用用户在提示框中输入的数据创建一个 JavaScript Cookie,当该用户再次访问该页面时,根据 cookie 中的信息发出欢迎信息. <html> & ...
- 在Microsoft Power BI中创建地图的10种方法
今天,我们来简单聊一聊“地图”. 在我们日常生活中,地图地位已经提升的越来越高,出门聚餐.驾驶.坐车.旅行......应运而生的就是各种Map APP. 作为数据分析师,我们今天不讲生活地图,要跟大家 ...
- C语言中怎么将文件里的数据创建到(读到)链表中?
定义的结构体: struct student { ]; //学生学号 ]; //学生姓名 struct student *next; //next 指针 指向 struct student 类型的变量 ...
- 【MySQL】MySQL中针对大数据量常用技术_创建索引+缓存配置+分库分表+子查询优化(转载)
原文地址:http://blog.csdn.net/zwan0518/article/details/11972853 目录(?)[-] 一查询优化 1创建索引 2缓存的配置 3slow_query_ ...
- Sql server中用现有表中的数据创建Sql的Insert插入语句
之前,在Codeproject发表过一篇关于用现有表中数据创建Insert的Sql语句的存储过程,今天将其搬到这里来,注意本存储过程仅适用于SQL SERVER. 介绍 一些时候,你想导出一些现有表中 ...
- iOS中偏好设置的创建,数据写入与读取
NSUserDefaults与NSDictinary? 应用通过NSUserDefaults用键值对的方式来读取和保存偏好设置数据,与通过键从NSDictionary对象中获取数据一样,不同之处在于N ...
- 通过Python提取10000份log中的产品数据
一.背景 协助产品部门在10000份产品log信息中提取产品的SN号.IMEI号.ICCID号到Excel表格中. 1.l原始的og内容: 2.提取后的Excel表格: 二.实现 1.思路 a.for ...
- 使用Socket通信实现Silverlight客户端实时数据的获取(模拟GPS数据,地图实时位置)
原文:使用Socket通信实现Silverlight客户端实时数据的获取(模拟GPS数据,地图实时位置) 在上一篇中说到了Silverlight下的Socket通信,在最后的时候说到本篇将会结合地图. ...
随机推荐
- hexo配置主题发表文章
将本地hexo博客部署到github上了,如果想换我们自己喜欢的主题(默认为landscape),同时也要发表发表文章呢,下面给介绍下: 1,进入hexo官网,预览自己想要的主题,https://gi ...
- Python 代码使用pdb调试技巧
Debug 对于任何开发人员都是一项非常重要的技能,它能够帮助我们准确的定位错误,发现程序中的 bug.python 提供了一系列 debug 的工具和包,可供我们选择.本文将主要阐述如何利用 pyt ...
- 一个苹果证书如何多次使用——导出p12文件[多台电脑使用]
为什么要导出.p12文件 当我们用大于三个mac设备开发应用时,想要申请新的证书,如果在我们的证书里,包含了3个发布证书,2个开发证书,可以发现再也申请不了开发证书和发布证书了(一般在我们的证书界面中 ...
- JAVA框架--hibernate、struts2、spring
JAVAEE——spring01:介绍.搭建.概念.配置详解.属性注入和应用到项目 JAVAEE——struts2_04:自定义拦截器.struts2标签.登陆功能和校验登陆拦截器的实现 JA ...
- ORACLE系统表大全
下面全面是对Oracle系统表的一些介绍: 数据字典dict总是属于Oracle用户sys的. 1.用户: select username from dba_users; 改口令 alter user ...
- JS、Jquery获取浏览器和屏幕各种高度宽度
网页可见区域宽:document.body.clientWidth网页可见区域高:document.body.clientHeight网页可见区域宽:document.body.offsetWidth ...
- SEO优化---10分钟学会建立高转化率的网站关键词库
想要优化好一个网站,行业的分析,以及关键词的挖掘是必要的,有一定的关键词排名了,但是转化率和流量方面却很不理想这种情况大部分是只注重了有指数的关键词排名,而忽略了长尾关键词和一些没有指数但是可以带来巨 ...
- Linux I/O 映射(ioremap)和writel/readl
在裸奔代码中,如果要控制gpio,直接控制gpio寄存器地址即可: 在linux系统中,所有操作的地址都是虚拟地址,都是由linux内核去管理,所以需要将物理地址转换成内核可识别的虚拟地址. 1.io ...
- 蓝桥杯 算法训练 ALGO-114 黑白无常
算法训练 黑白无常 时间限制:1.0s 内存限制:256.0MB 问题描述 某寝室的同学们在学术完之后准备玩一个游戏:游戏是这样的,每个人头上都被贴了一张白色或者黑色的纸,现在每个人都会说一句 ...
- Linux:课程安排、Linux简介、虚拟机安装、课前准备(常用设置和操作)
一.课程安排 1)Linux 的作用 商业服务器基本上都是 Linux: 开源软件都先支持 Linux: 大数据分析.机器学习首先选 Linux: 整个互联网地基靠Linux撑起来: Linux 系统 ...