AcWing 342. 道路与航线
#include<bits/stdc++.h>
using namespace std;
const int N=2e5+5;
int h[N],cnt,to[N],nxt[N],vis[N],n,r,p,s,d[N],a[N];
void add(int u,int v,int w){to[++cnt]=v;vis[cnt]=w;nxt[cnt]=h[u];h[u]=cnt;}
void spfa()
{
deque<int>q;
memset(d,0x3f3f3f3f,sizeof d);
d[s]=0;a[s]=1;
q.push_back(s);
while(q.size())
{
int u=q.front();q.pop_front();
a[u]=0;
for(int i=h[u];i;i=nxt[i])
if(d[to[i]]>d[u]+vis[i])
{
d[to[i]]=d[u]+vis[i];
if(!a[to[i]])
{
a[to[i]]=1;
if(d[to[i]]<=d[q.front()])q.push_front(to[i]);
else q.push_back(to[i]);
}
}
}
}
int main()
{
cin>>n>>r>>p>>s;
int u,v,w;
for(int i=1;i<=r;i++)
{
scanf("%d%d%d",&u,&v,&w);
add(u,v,w);add(v,u,w);
}
for(int i=1;i<=p;i++)
{
scanf("%d%d%d",&u,&v,&w);
add(u,v,w);
}
spfa();
for(int i=1;i<=n;i++)
if(d[i]>=0x3f3f3f3f)puts("NO PATH");
else cout<<d[i]<<endl;
return 0;
}
AcWing 342. 道路与航线的更多相关文章
- 2200: [Usaco2011 Jan]道路和航线 (拓扑排序+dijstra)
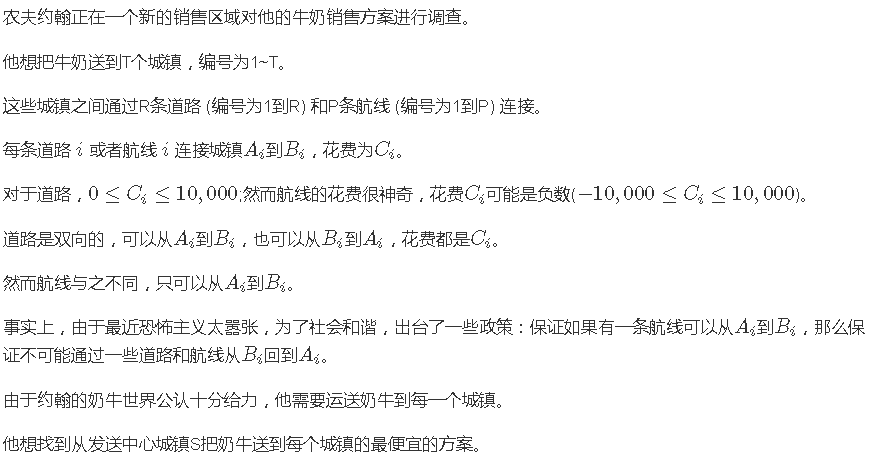
Description Farmer John正在一个新的销售区域对他的牛奶销售方案进行调查.他想把牛奶送到T个城镇 (1 <= T <= 25,000),编号为1T.这些城镇之间通过R条 ...
- BZOJ 2200--[Usaco2011 Jan]道路和航线(最短路&拓扑排序)
2200: [Usaco2011 Jan]道路和航线 Time Limit: 10 Sec Memory Limit: 259 MBSubmit: 1128 Solved: 414[Submit] ...
- BZOJ2200 道路和航线【好题】【dfs】【最短路】【缩点】
2200: [Usaco2011 Jan]道路和航线 Time Limit: 10 Sec Memory Limit: 259 MBSubmit: 1384 Solved: 508[Submit] ...
- [BZOJ 2200][Usaco2011 Jan]道路和航线 spfa+SLF优化
Description Farmer John正在一个新的销售区域对他的牛奶销售方案进行调查.他想把牛奶送到T个城镇 (1 <= T <= 25,000),编号为1T.这些城镇之间通过R条 ...
- bzoj2200道路和航线
试题描述 Farmer John 正在一个新的销售区域对他的牛奶销售方案进行调查.他想把牛奶送到 T (1≤T≤2.5×10^4)个城镇 ,编号为 1 到 T.这些城镇之间通过 R 条道路(编号为 1 ...
- bzoj 2200: [Usaco2011 Jan]道路和航线——拓扑+dijkstra
Description Farmer John正在一个新的销售区域对他的牛奶销售方案进行调查.他想把牛奶送到T个城镇 (1 <= T <= 25,000),编号为1T.这些城镇之间通过R条 ...
- [Usaco2011 Jan]道路和航线
Description Farmer John正在一个新的销售区域对他的牛奶销售方案进行调查.他想把牛奶送到T个城镇 (1 <= T <= 25,000),编号为1T.这些城镇之间通过R条 ...
- BZOJ 2200: [Usaco2011 Jan]道路和航线
Description Farmer John正在一个新的销售区域对他的牛奶销售方案进行调查.他想把牛奶送到T个城镇 (1 <= T <= 25,000),编号为1T.这些城镇之间通过R条 ...
- BZOJ 2200 道路与航线(图论)
BZOJ 2200 道路与航线 题目大意 有两种路,一种没负数,一种没环,求单源最短路. solution 存在负边权Dij一定不能用嘛,显然不是 根据题意能看出来是tarjan,将双向边缩点,得到的 ...
随机推荐
- sersync 实时同步网站数据
sersync同步实战 sersync是基于inotify和srync的二次开发,代码托管在github上面在rsync的客户端上安装,下载地址: https://raw.githubusercont ...
- DOCKER学习_015:Docker网络补充
1 Docker容器使用LINK方式互通 在前面的网络实验中,当同一主机的两个Docker容器,使用Bridge网桥互通时,我们必须使用docker inspect Dockerid查找出Docker ...
- mysql的示例及练习
示例及练习1-MOSHOU.hero.txtcreate database MOSHOU;use MOSHOU;create table hero(id int,name char(15),sex e ...
- Linux 仿真终端:SecureCRT 常用配置
SecureCRT 有两类配置选项,分别是会话选项和全局选项. 会话选项:修改配置只针对当前会话有效 全局选项:修改配置对所有会话有效 一般会先选择全局选项修改全局配置,然后选择会话选项单独修改个别会 ...
- 3.1 cat:合并文件或查看文件内容
cat 命令 可以理解为英文单词concatenate的缩写,其功能是连接多个文件并且打印到屏幕输出,或者重定向到指定的文件中.此命令常用来显示单个文件内容,或者将几个文件内容连接起来一起显示,还可以 ...
- 电脑华硕A455L系列,机械硬盘换成固态硬盘,光驱位改放机械硬盘
电脑一直以来都很卡,直到最近用的不舒服了,就去查查原因,发现是磁盘读取爆表!只好想起来换固态硬盘,光驱改放机械硬盘... 买的固态硬盘是个杂牌军,但是店家说工艺不错,只好将信将疑,用用再说吧. 首先确 ...
- Jittor 的Op, Var算子
Jittor 的Op, Var算子 要使用jittor训练模型,需要了解两个主要概念: Var:Jittor的基本数据类型 Operations:Jittor的算子与numpy类似 首先,开始使用Va ...
- tensorflow-yolov4实施方法
tensorflow-yolov4实施方法 tensorflow-yolov4-tflite YOLOv4: Optimal Speed and Accuracy of Object Detectio ...
- ITS智能交通监控系统技术解析
ITS智能交通监控系统技术解析 红灯,逆行,变 车辆抓拍和车速检测 非法停车和交通流量检测 交叉路口违法检测 发生碰撞的交叉口是智能交通管理. 机动执法 当你需要一个可以移动的系统时,会跟着你移动.移 ...
- 第五周 Spring框架
一.Spring框架设计 Spring framework 6大模块 1.1 Spring AOP AOP: 面向切面编程 Spring 早期版本的核心功能,管理对象声明周期和对象装配 为了实现管理和 ...