相机标定 matlab opencv ROS三种方法标定步骤(2)
二 ubuntu下Opencv的相机标定
一般直接用Opencv的源码就可以进行相机的标定,但是可能只是会实现结果,却不懂实现的过程,我也是模模糊糊的看了《计算机视觉中的多视图几何》以及实现一些经典的算法,对Opencv有一些了解才开始做相机的标定,可以先看看源码:
#include <iostream>
#include <sstream>
#include <time.h>
#include <stdio.h> #include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/calib3d/calib3d.hpp>
#include <opencv2/highgui/highgui.hpp> #ifndef _CRT_SECURE_NO_WARNINGS
# define _CRT_SECURE_NO_WARNINGS
#endif using namespace cv;
using namespace std; static void help()
{
cout << "This is a camera calibration sample." << endl
<< "Usage: calibration configurationFile" << endl
<< "Near the sample file you'll find the configuration file, which has detailed help of "
"how to edit it. It may be any OpenCV supported file format XML/YAML." << endl;
}
class Settings
{
public:
Settings() : goodInput(false) {}
enum Pattern { NOT_EXISTING, CHESSBOARD, CIRCLES_GRID, ASYMMETRIC_CIRCLES_GRID };
enum InputType {INVALID, CAMERA, VIDEO_FILE, IMAGE_LIST}; void write(FileStorage& fs) const //Write serialization for this class
{
fs << "{" << "BoardSize_Width" << boardSize.width
<< "BoardSize_Height" << boardSize.height
<< "Square_Size" << squareSize
<< "Calibrate_Pattern" << patternToUse
<< "Calibrate_NrOfFrameToUse" << nrFrames
<< "Calibrate_FixAspectRatio" << aspectRatio
<< "Calibrate_AssumeZeroTangentialDistortion" << calibZeroTangentDist
<< "Calibrate_FixPrincipalPointAtTheCenter" << calibFixPrincipalPoint << "Write_DetectedFeaturePoints" << bwritePoints
<< "Write_extrinsicParameters" << bwriteExtrinsics
<< "Write_outputFileName" << outputFileName << "Show_UndistortedImage" << showUndistorsed << "Input_FlipAroundHorizontalAxis" << flipVertical
<< "Input_Delay" << delay
<< "Input" << input
<< "}";
}
void read(const FileNode& node) //Read serialization for this class
{
node["BoardSize_Width" ] >> boardSize.width;
node["BoardSize_Height"] >> boardSize.height;
node["Calibrate_Pattern"] >> patternToUse;
node["Square_Size"] >> squareSize;
node["Calibrate_NrOfFrameToUse"] >> nrFrames;
node["Calibrate_FixAspectRatio"] >> aspectRatio;
node["Write_DetectedFeaturePoints"] >> bwritePoints;
node["Write_extrinsicParameters"] >> bwriteExtrinsics;
node["Write_outputFileName"] >> outputFileName;
node["Calibrate_AssumeZeroTangentialDistortion"] >> calibZeroTangentDist;
node["Calibrate_FixPrincipalPointAtTheCenter"] >> calibFixPrincipalPoint;
node["Input_FlipAroundHorizontalAxis"] >> flipVertical;
node["Show_UndistortedImage"] >> showUndistorsed;
node["Input"] >> input;
node["Input_Delay"] >> delay;
interprate();
}
void interprate()
{
goodInput = true;
if (boardSize.width <= || boardSize.height <= )
{
cerr << "Invalid Board size: " << boardSize.width << " " << boardSize.height << endl;
goodInput = false;
}
if (squareSize <= 10e-)
{
cerr << "Invalid square size " << squareSize << endl;
goodInput = false;
}
if (nrFrames <= )
{
cerr << "Invalid number of frames " << nrFrames << endl;
goodInput = false;
} if (input.empty()) // Check for valid input
inputType = INVALID;
else
{
if (input[] >= '' && input[] <= '')
{
stringstream ss(input);
ss >> cameraID;
inputType = CAMERA;
}
else
{
if (readStringList(input, imageList))
{
inputType = IMAGE_LIST;
nrFrames = (nrFrames < (int)imageList.size()) ? nrFrames : (int)imageList.size();
}
else
inputType = VIDEO_FILE;
}
if (inputType == CAMERA)
inputCapture.open(cameraID);
if (inputType == VIDEO_FILE)
inputCapture.open(input);
if (inputType != IMAGE_LIST && !inputCapture.isOpened())
inputType = INVALID;
}
if (inputType == INVALID)
{
cerr << " Inexistent input: " << input;
goodInput = false;
} flag = ;
if(calibFixPrincipalPoint) flag |= CV_CALIB_FIX_PRINCIPAL_POINT;
if(calibZeroTangentDist) flag |= CV_CALIB_ZERO_TANGENT_DIST;
if(aspectRatio) flag |= CV_CALIB_FIX_ASPECT_RATIO; calibrationPattern = NOT_EXISTING;
if (!patternToUse.compare("CHESSBOARD")) calibrationPattern = CHESSBOARD;
if (!patternToUse.compare("CIRCLES_GRID")) calibrationPattern = CIRCLES_GRID;
if (!patternToUse.compare("ASYMMETRIC_CIRCLES_GRID")) calibrationPattern = ASYMMETRIC_CIRCLES_GRID;
if (calibrationPattern == NOT_EXISTING)
{
cerr << " Inexistent camera calibration mode: " << patternToUse << endl;
goodInput = false;
}
atImageList = ; }
Mat nextImage()
{
Mat result;
if( inputCapture.isOpened() )
{
Mat view0;
inputCapture >> view0;
view0.copyTo(result);
}
else if( atImageList < (int)imageList.size() )
result = imread(imageList[atImageList++], CV_LOAD_IMAGE_COLOR); return result;
} static bool readStringList( const string& filename, vector<string>& l )
{
l.clear();
FileStorage fs(filename, FileStorage::READ);
if( !fs.isOpened() )
return false;
FileNode n = fs.getFirstTopLevelNode();
if( n.type() != FileNode::SEQ )
return false;
FileNodeIterator it = n.begin(), it_end = n.end();
for( ; it != it_end; ++it )
l.push_back((string)*it);
return true;
}
public:
Size boardSize; // The size of the board -> Number of items by width and height
Pattern calibrationPattern;// One of the Chessboard, circles, or asymmetric circle pattern
float squareSize; // The size of a square in your defined unit (point, millimeter,etc).
int nrFrames; // The number of frames to use from the input for calibration
float aspectRatio; // The aspect ratio
int delay; // In case of a video input
bool bwritePoints; // Write detected feature points
bool bwriteExtrinsics; // Write extrinsic parameters
bool calibZeroTangentDist; // Assume zero tangential distortion
bool calibFixPrincipalPoint;// Fix the principal point at the center
bool flipVertical; // Flip the captured images around the horizontal axis
string outputFileName; // The name of the file where to write
bool showUndistorsed; // Show undistorted images after calibration
string input; // The input -> int cameraID;
vector<string> imageList;
int atImageList;
VideoCapture inputCapture;
InputType inputType;
bool goodInput;
int flag; private:
string patternToUse; }; static void read(const FileNode& node, Settings& x, const Settings& default_value = Settings())
{
if(node.empty())
x = default_value;
else
x.read(node);
} enum { DETECTION = , CAPTURING = , CALIBRATED = }; bool runCalibrationAndSave(Settings& s, Size imageSize, Mat& cameraMatrix, Mat& distCoeffs,
vector<vector<Point2f> > imagePoints ); int main(int argc, char* argv[])
{
help();
Settings s;
const string inputSettingsFile = argc > ? argv[] : "default.xml";
FileStorage fs(inputSettingsFile, FileStorage::READ); // Read the settings
if (!fs.isOpened())
{
cout << "Could not open the configuration file: \"" << inputSettingsFile << "\"" << endl;
return -;
}
fs["Settings"] >> s;
fs.release(); // close Settings file if (!s.goodInput)
{
cout << "Invalid input detected. Application stopping. " << endl;
return -;
} vector<vector<Point2f> > imagePoints;
Mat cameraMatrix, distCoeffs;
Size imageSize;
int mode = s.inputType == Settings::IMAGE_LIST ? CAPTURING : DETECTION;
clock_t prevTimestamp = ;
const Scalar RED(,,), GREEN(,,);
const char ESC_KEY = ; for(int i = ;;++i)
{
Mat view;
bool blinkOutput = false; view = s.nextImage(); //----- If no more image, or got enough, then stop calibration and show result -------------
if( mode == CAPTURING && imagePoints.size() >= (unsigned)s.nrFrames )
{
if( runCalibrationAndSave(s, imageSize, cameraMatrix, distCoeffs, imagePoints))
mode = CALIBRATED;
else
mode = DETECTION;
}
if(view.empty()) // If no more images then run calibration, save and stop loop.
{
if( imagePoints.size() > )
runCalibrationAndSave(s, imageSize, cameraMatrix, distCoeffs, imagePoints);
break;
} imageSize = view.size(); // Format input image.
if( s.flipVertical ) flip( view, view, ); vector<Point2f> pointBuf; bool found;
switch( s.calibrationPattern ) // Find feature points on the input format
{
case Settings::CHESSBOARD:
found = findChessboardCorners( view, s.boardSize, pointBuf,
CV_CALIB_CB_ADAPTIVE_THRESH | CV_CALIB_CB_FAST_CHECK | CV_CALIB_CB_NORMALIZE_IMAGE);
break;
case Settings::CIRCLES_GRID:
found = findCirclesGrid( view, s.boardSize, pointBuf );
break;
case Settings::ASYMMETRIC_CIRCLES_GRID:
found = findCirclesGrid( view, s.boardSize, pointBuf, CALIB_CB_ASYMMETRIC_GRID );
break;
default:
found = false;
break;
} if ( found) // If done with success,
{
// improve the found corners' coordinate accuracy for chessboard
if( s.calibrationPattern == Settings::CHESSBOARD)
{
Mat viewGray;
cvtColor(view, viewGray, COLOR_BGR2GRAY);
cornerSubPix( viewGray, pointBuf, Size(,),
Size(-,-), TermCriteria( CV_TERMCRIT_EPS+CV_TERMCRIT_ITER, , 0.1 ));
} if( mode == CAPTURING && // For camera only take new samples after delay time
(!s.inputCapture.isOpened() || clock() - prevTimestamp > s.delay*1e-*CLOCKS_PER_SEC) )
{
imagePoints.push_back(pointBuf);
prevTimestamp = clock();
blinkOutput = s.inputCapture.isOpened();
} // Draw the corners.
drawChessboardCorners( view, s.boardSize, Mat(pointBuf), found );
} //----------------------------- Output Text ------------------------------------------------
string msg = (mode == CAPTURING) ? "100/100" :
mode == CALIBRATED ? "Calibrated" : "Press 'g' to start";
int baseLine = ;
Size textSize = getTextSize(msg, , , , &baseLine);
Point textOrigin(view.cols - *textSize.width - , view.rows - *baseLine - ); if( mode == CAPTURING )
{
if(s.showUndistorsed)
msg = format( "%d/%d Undist", (int)imagePoints.size(), s.nrFrames );
else
msg = format( "%d/%d", (int)imagePoints.size(), s.nrFrames );
} putText( view, msg, textOrigin, , , mode == CALIBRATED ? GREEN : RED); if( blinkOutput )
bitwise_not(view, view); //------------------------- Video capture output undistorted ------------------------------
if( mode == CALIBRATED && s.showUndistorsed )
{
Mat temp = view.clone();
undistort(temp, view, cameraMatrix, distCoeffs);
} //------------------------------ Show image and check for input commands -------------------
imshow("Image View", view);
char key = (char)waitKey(s.inputCapture.isOpened() ? : s.delay); if( key == ESC_KEY )
break; if( key == 'u' && mode == CALIBRATED )
s.showUndistorsed = !s.showUndistorsed; if( s.inputCapture.isOpened() && key == 'g' )
{
mode = CAPTURING;
imagePoints.clear();
}
} // -----------------------Show the undistorted image for the image list ------------------------
if( s.inputType == Settings::IMAGE_LIST && s.showUndistorsed )
{
Mat view, rview, map1, map2;
initUndistortRectifyMap(cameraMatrix, distCoeffs, Mat(),
getOptimalNewCameraMatrix(cameraMatrix, distCoeffs, imageSize, , imageSize, ),
imageSize, CV_16SC2, map1, map2); for(int i = ; i < (int)s.imageList.size(); i++ )
{
view = imread(s.imageList[i], );
if(view.empty())
continue;
remap(view, rview, map1, map2, INTER_LINEAR);
imshow("Image View", rview);
char c = (char)waitKey();
if( c == ESC_KEY || c == 'q' || c == 'Q' )
break;
}
} return ;
} static double computeReprojectionErrors( const vector<vector<Point3f> >& objectPoints,
const vector<vector<Point2f> >& imagePoints,
const vector<Mat>& rvecs, const vector<Mat>& tvecs,
const Mat& cameraMatrix , const Mat& distCoeffs,
vector<float>& perViewErrors)
{
vector<Point2f> imagePoints2;
int i, totalPoints = ;
double totalErr = , err;
perViewErrors.resize(objectPoints.size()); for( i = ; i < (int)objectPoints.size(); ++i )
{
projectPoints( Mat(objectPoints[i]), rvecs[i], tvecs[i], cameraMatrix,
distCoeffs, imagePoints2);
err = norm(Mat(imagePoints[i]), Mat(imagePoints2), CV_L2); int n = (int)objectPoints[i].size();
perViewErrors[i] = (float) std::sqrt(err*err/n);
totalErr += err*err;
totalPoints += n;
} return std::sqrt(totalErr/totalPoints);
} static void calcBoardCornerPositions(Size boardSize, float squareSize, vector<Point3f>& corners,
Settings::Pattern patternType /*= Settings::CHESSBOARD*/)
{
corners.clear(); switch(patternType)
{
case Settings::CHESSBOARD:
case Settings::CIRCLES_GRID:
for( int i = ; i < boardSize.height; ++i )
for( int j = ; j < boardSize.width; ++j )
corners.push_back(Point3f(float( j*squareSize ), float( i*squareSize ), ));
break; case Settings::ASYMMETRIC_CIRCLES_GRID:
for( int i = ; i < boardSize.height; i++ )
for( int j = ; j < boardSize.width; j++ )
corners.push_back(Point3f(float((*j + i % )*squareSize), float(i*squareSize), ));
break;
default:
break;
}
} static bool runCalibration( Settings& s, Size& imageSize, Mat& cameraMatrix, Mat& distCoeffs,
vector<vector<Point2f> > imagePoints, vector<Mat>& rvecs, vector<Mat>& tvecs,
vector<float>& reprojErrs, double& totalAvgErr)
{ cameraMatrix = Mat::eye(, , CV_64F);
if( s.flag & CV_CALIB_FIX_ASPECT_RATIO )
cameraMatrix.at<double>(,) = 1.0; distCoeffs = Mat::zeros(, , CV_64F); vector<vector<Point3f> > objectPoints();
calcBoardCornerPositions(s.boardSize, s.squareSize, objectPoints[], s.calibrationPattern); objectPoints.resize(imagePoints.size(),objectPoints[]); //Find intrinsic and extrinsic camera parameters
double rms = calibrateCamera(objectPoints, imagePoints, imageSize, cameraMatrix,
distCoeffs, rvecs, tvecs, s.flag|CV_CALIB_FIX_K4|CV_CALIB_FIX_K5); cout << "Re-projection error reported by calibrateCamera: "<< rms << endl; bool ok = checkRange(cameraMatrix) && checkRange(distCoeffs); totalAvgErr = computeReprojectionErrors(objectPoints, imagePoints,
rvecs, tvecs, cameraMatrix, distCoeffs, reprojErrs); return ok;
} // Print camera parameters to the output file
static void saveCameraParams( Settings& s, Size& imageSize, Mat& cameraMatrix, Mat& distCoeffs,
const vector<Mat>& rvecs, const vector<Mat>& tvecs,
const vector<float>& reprojErrs, const vector<vector<Point2f> >& imagePoints,
double totalAvgErr )
{
FileStorage fs( s.outputFileName, FileStorage::WRITE ); time_t tm;
time( &tm );
struct tm *t2 = localtime( &tm );
char buf[];
strftime( buf, sizeof(buf)-, "%c", t2 ); fs << "calibration_Time" << buf; if( !rvecs.empty() || !reprojErrs.empty() )
fs << "nrOfFrames" << (int)std::max(rvecs.size(), reprojErrs.size());
fs << "image_Width" << imageSize.width;
fs << "image_Height" << imageSize.height;
fs << "board_Width" << s.boardSize.width;
fs << "board_Height" << s.boardSize.height;
fs << "square_Size" << s.squareSize; if( s.flag & CV_CALIB_FIX_ASPECT_RATIO )
fs << "FixAspectRatio" << s.aspectRatio; if( s.flag )
{
sprintf( buf, "flags: %s%s%s%s",
s.flag & CV_CALIB_USE_INTRINSIC_GUESS ? " +use_intrinsic_guess" : "",
s.flag & CV_CALIB_FIX_ASPECT_RATIO ? " +fix_aspectRatio" : "",
s.flag & CV_CALIB_FIX_PRINCIPAL_POINT ? " +fix_principal_point" : "",
s.flag & CV_CALIB_ZERO_TANGENT_DIST ? " +zero_tangent_dist" : "" );
cvWriteComment( *fs, buf, ); } fs << "flagValue" << s.flag; fs << "Camera_Matrix" << cameraMatrix;
fs << "Distortion_Coefficients" << distCoeffs; fs << "Avg_Reprojection_Error" << totalAvgErr;
if( !reprojErrs.empty() )
fs << "Per_View_Reprojection_Errors" << Mat(reprojErrs); if( !rvecs.empty() && !tvecs.empty() )
{
CV_Assert(rvecs[].type() == tvecs[].type());
Mat bigmat((int)rvecs.size(), , rvecs[].type());
for( int i = ; i < (int)rvecs.size(); i++ )
{
Mat r = bigmat(Range(i, i+), Range(,));
Mat t = bigmat(Range(i, i+), Range(,)); CV_Assert(rvecs[i].rows == && rvecs[i].cols == );
CV_Assert(tvecs[i].rows == && tvecs[i].cols == );
//*.t() is MatExpr (not Mat) so we can use assignment operator
r = rvecs[i].t();
t = tvecs[i].t();
}
cvWriteComment( *fs, "a set of 6-tuples (rotation vector + translation vector) for each view", );
fs << "Extrinsic_Parameters" << bigmat;
} if( !imagePoints.empty() )
{
Mat imagePtMat((int)imagePoints.size(), (int)imagePoints[].size(), CV_32FC2);
for( int i = ; i < (int)imagePoints.size(); i++ )
{
Mat r = imagePtMat.row(i).reshape(, imagePtMat.cols);
Mat imgpti(imagePoints[i]);
imgpti.copyTo(r);
}
fs << "Image_points" << imagePtMat;
}
} bool runCalibrationAndSave(Settings& s, Size imageSize, Mat& cameraMatrix, Mat& distCoeffs,vector<vector<Point2f> > imagePoints )
{
vector<Mat> rvecs, tvecs;
vector<float> reprojErrs;
double totalAvgErr = ; bool ok = runCalibration(s,imageSize, cameraMatrix, distCoeffs, imagePoints, rvecs, tvecs,
reprojErrs, totalAvgErr);
cout << (ok ? "Calibration succeeded" : "Calibration failed")
<< ". avg re projection error = " << totalAvgErr ; if( ok )
saveCameraParams( s, imageSize, cameraMatrix, distCoeffs, rvecs ,tvecs, reprojErrs,
imagePoints, totalAvgErr);
return ok;
}
网上有很多关于相机标定的代码,但都是没有官方网站的源文件更详细,给源文件同时写一个Makefile文件
#Makefile for camera_calibrateion
EXE =camera_calibration
OBJS += camera_calibration.o CC = g++
CFLAGS += -g -O3 -Wall
INC += -I. `pkg-config --cflags opencv`
LIBS += `pkg-config --libs opencv` all:$(EXE) $(EXE):$(OBJS)
$(CC) $(INC) $(CFLAGS) $(OBJS) -o $(EXE) $(LIBS)
$(OBJS):%.o:%.cpp
$(CC) $(INC) $(CFLAGS) -c $< -o $@ .PHONY:clean
clean:
rm -r *.o $(EXE)
然后make一下就会生成可执行文件,那么同时还要有一个配置文件 .xml 要在同一个目录文件下,原文件提供了三种方式进行标定,
(1) 直接输入摄像头信息
(2)采用已经采集好的多照不同位置的标定模板
(3 )使用采集下的视频流文件
那么我这里只做了(1) (2)并且标定不同的摄像头
(1)采用摄像头的输入方式的mycamera.xml 代码如下:(同时要在camera_calibration.cpp文件里更改读取的.xml文件)
(这里的标定模板我是用A3纸张打印出来,为8*6 35mm的标定棋盘)
<?xml version="1.0"?>
<opencv_storage>
<!--设置标定参数-->
<Settings> <!-- Number of inner corners per a item row and column. 宽度和高度的设置(square, circle) -->
<BoardSize_Width> 8</BoardSize_Width>
<BoardSize_Height>6</BoardSize_Height> <!-- The size of a square in some user defined metric system 每个方格的边长的长度单位一般是mm(pixel, millimeter)-->
<Square_Size>35</Square_Size> <!-- The type of input used for camera calibration. 标定模板的样式(棋盘)
这里一共有三种模板One of: CHESSBOARD CIRCLES_GRID ASYMMETRIC_CIRCLES_GRID -->
<Calibrate_Pattern>"CHESSBOARD"</Calibrate_Pattern> <!-- The input to use for calibration.
To use an input camera -> give the ID of the camera, like "1"
To use an input video -> give the path of the input video, like "/tmp/x.avi"
To use an image list -> give the path to the XML or YAML file containing the list of the images,
like "/tmp/circles_list.xml"
输入标定模板的方式有三种方式:摄像头输入;视频输入;照片文件流输入-->
<Input>"1"</Input> <!-- If true (non-zero) we flip the input images around the horizontal axis.
如果为真(非零),安照垂直方向翻转输入图像,这里选择为零,即不翻转-->
<Input_FlipAroundHorizontalAxis>0</Input_FlipAroundHorizontalAxis> <!-- Time delay between frames in case of camera.在使用相机的情况下的帧之间的时间延迟 -->
<Input_Delay>100</Input_Delay>
<!-- How many frames to use, for calibration.用多少帧照片去校准,可以自己设置,一般不能低于20个 -->
<Calibrate_NrOfFrameToUse>25</Calibrate_NrOfFrameToUse>
<!-- Consider only fy as a free parameter, the ratio fx/fy stays the same as in the input cameraMatrix.
Use or not setting. 0 - False Non-Zero - True
假设fy是一个自由参数,而fx/fy是一个固定的比例参数,使用或者不设置 0 假 非零 真-->
<Calibrate_FixAspectRatio> 1 </Calibrate_FixAspectRatio>
<!-- If true (non-zero) tangential distortion coefficients are set to zeros and stay zero.
如果设置为真,表示切向畸变系数被设置为0 保持为零-->
<Calibrate_AssumeZeroTangentialDistortion>1</Calibrate_AssumeZeroTangentialDistortion>
<!-- If true (non-zero) the principal point(摄像机坐标系下真实的坐标原点) is not changed during the global optimization.-->
<Calibrate_FixPrincipalPointAtTheCenter> 1 </Calibrate_FixPrincipalPointAtTheCenter>
<!-- The name of the output log file. 输出文件的名称-->
<Write_outputFileName>"out_camera_data.xml"</Write_outputFileName>
<!-- If true (non-zero) we write to the output file the feature points.(如果为真我们向输出文件写入特征点)-->
<Write_DetectedFeaturePoints>1</Write_DetectedFeaturePoints>
<!-- If true (non-zero) we write to the output file the extrinsic camera parameters.(写入相机的外部参数)-->
<Write_extrinsicParameters>1</Write_extrinsicParameters>
<!-- If true (non-zero) we show after calibration the undistorted images.展示校准后不失真的照片-->
<Show_UndistortedImage>1</Show_UndistortedImage> </Settings> </opencv_storage>
里面的汉字是我写的标注,其中有几个地方需要修改的与我们的实际标定模板一致
<BoardSize_Width> 8</BoardSize_Width> :表示标定模板的宽度 实际一共有9个黑白方格
<BoardSize_Height>6</BoardSize_Height> :实际有7个黑白方格
<Calibrate_Pattern>"CHESSBOARD"</Calibrate_Pattern>
:选择棋盘形式,一共有 CHESSBOARD ,CIRCLES_GRID, ASYMMETRIC_CIRCLES_GRID三种
<Square_Size>35</Square_Size> :每个黑白方格的边长35mm(根据实际情况)
<Input>"1"</Input> :选择标定模板的输入种类 1. To use an input camera -> give the ID of the camera, like "1"
2. To use an input video -> give the path of the input video, like "/tmp/x.avi"
3. To use an image list -> give the path to the XML or YAML file containing the list of the images, <Write_outputFileName>"out_camera_data.xml"</Write_outputFileName>
<Write_outputFileName>"out_camera_data.xml"</Write_outputFileName> :表示标定输出文件
运行文件夹下运行./camera_calibration 会启动摄像头,然后选择“g”开始标定 ,但是如果上面的这些参数没有设置的与实际相符合,是不会开始采集标定模板的,(我刚开始就出现了这个错误,所以一定亚设置与实际的标定模板一致)
就会开始采集25个不同角度和位置的标定模板,如下图:
注意(我这样直接拿着标定模板来标定是不正确的,应该用一个平面模板把标定模板固定住,这样的标定的结果才是更加准确的,因为这样只是做实验,)
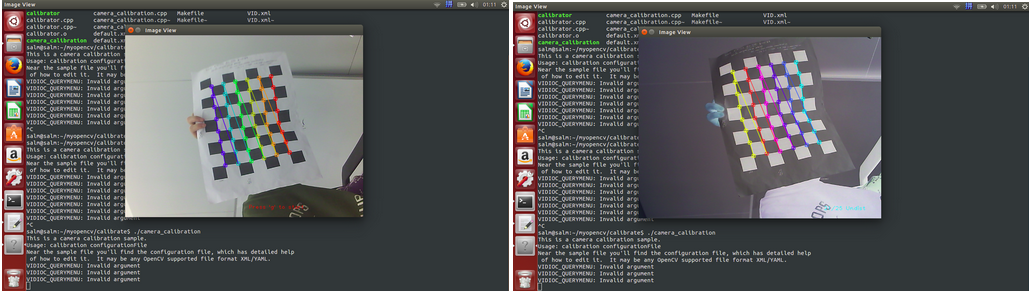
每采集成功一次就会变为二图,颜色略有变化,采集完成就会自动开始校准如下:
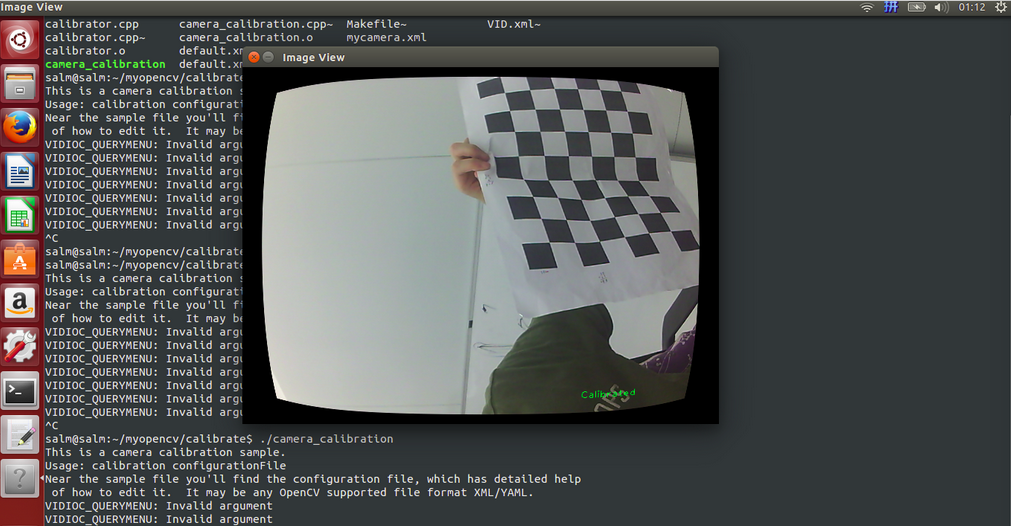
此时在工程文件夹下就会生成out_camera_data.xml,就是相机的标定结果报告
(2)使用Opencv 提供的标定模板进行标定
我们只需要更改
<BoardSize_Width> 8</BoardSize_Width> 改为 <BoardSize_Width> 6</BoardSize_Width>
<BoardSize_Height>6</BoardSize_Height> 改为 <BoardSize_Height>4</BoardSize_Height>
<Square_Size>35</Square_Size> 改为 <Square_Size108</Square_Size>
<Input>"1"</Input> 改为 <Input>"/home/salm/myopencv/calibrate/VID.xml"</Input>
这里就是指定了另一个.xml文件,就是标定模板的图片,其中VID.xml内容为:
<?xml version="1.0"?>
<opencv_storage>
<images>
/home/salm/myopencv/images/chessboards/chessboard01.jpg
/home/salm/myopencv/images/chessboards/chessboard02.jpg
/home/salm/myopencv/images/chessboards/chessboard03.jpg
/home/salm/myopencv/images/chessboards/chessboard04.jpg
/home/salm/myopencv/images/chessboards/chessboard05.jpg
/home/salm/myopencv/images/chessboards/chessboard06.jpg
/home/salm/myopencv/images/chessboards/chessboard07.jpg
/home/salm/myopencv/images/chessboards/chessboard08.jpg
/home/salm/myopencv/images/chessboards/chessboard09.jpg
/home/salm/myopencv/images/chessboards/chessboard10.jpg
/home/salm/myopencv/images/chessboards/chessboard11.jpg
/home/salm/myopencv/images/chessboards/chessboard12.jpg
/home/salm/myopencv/images/chessboards/chessboard13.jpg
/home/salm/myopencv/images/chessboards/chessboard14.jpg
/home/salm/myopencv/images/chessboards/chessboard15.jpg
/home/salm/myopencv/images/chessboards/chessboard16.jpg
/home/salm/myopencv/images/chessboards/chessboard17.jpg
/home/salm/myopencv/images/chessboards/chessboard18.jpg
/home/salm/myopencv/images/chessboards/chessboard19.jpg
/home/salm/myopencv/images/chessboards/chessboard20.jpg
/home/salm/myopencv/images/chessboards/chessboard21.jpg
/home/salm/myopencv/images/chessboards/chessboard22.jpg
/home/salm/myopencv/images/chessboards/chessboard23.jpg
/home/salm/myopencv/images/chessboards/chessboard24.jpg
/home/salm/myopencv/images/chessboards/chessboard25.jpg
</images>
</opencv_storage>
运行文件夹下运行./camera_calibration 会启动VID.xml文件下的图片,这是标定过程中的截图文件 如图
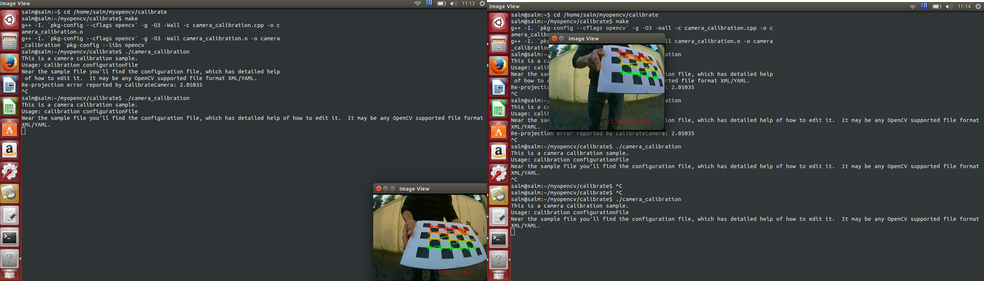
此时在工程文件夹下就会生成out_camera_data.xml
后续还有其他相关的只是待我学习完了再写出来,只是为了记录我的实验过程,如果能有人从中获取帮助,那就更好了
(如果很不幸,被大神们看见了,就直接嗤之以鼻吧,因为没有什么创新的东西,谢谢)
如果您觉得看完有所收获,可以资助一分,几分money,不在乎多少(我也是跟网上的大神们学的),不想挣钱娶媳妇的程序员不是好程序员(同时我也看看到底有没有人认可),谢谢

版权所有,转载请注明出处 http://www.cnblogs.com/li-yao7758258/p/5933653.html相机标定 matlab opencv ROS三种方法标定步骤(2)的更多相关文章
- 相机标定 matlab opencv ROS三种方法标定步骤(1)
一 . 理解摄像机模型,网上有很多讲解的十分详细,在这里我只是记录我的整合出来的资料和我的部分理解 计算机视觉领域中常见的三个坐标系:图像坐标系,相机坐标系,世界坐标系,实际上就是要用矩阵来表 示各个 ...
- 相机标定 matlab opencv ROS三种方法标定步骤(3)
三 , ROS 环境下 如何进行相机标定 刚开始做到的时候遇到一些问题没有记录下来,现在回头写的时候都是没有错误的结果了,首先使用ROS标定相机, 要知道如何查看节点之间的流程图 rosrun r ...
- matlab多行注释的三种方法
转自:http://icictech.blog.163.com/blog/static/2797425420084595725499/ 1)方法一 选中你要加注释的内容,然后选择工具菜单"t ...
- 用matlab脚本语言写M文件函数时用三种方法简单实现实现DFT(离散傅里叶变换)
%用二重循环实现DFT: function xk=dt_0(xn); %define a function N=length(xn); %caculate the length of the vari ...
- Matlab中数组元素引用——三种方法
Matlab中数组元素引用——三种方法 1.Matlab中数组元素引用有三种方法 1 2 3 1.下标法(subscripts) 2.索引法(index) 3.布尔法(Boolean) 注意:在使 ...
- MATLAB中多行注释的三种方法
MATLAB中多行注释的三种方法 A. %{ 若干语句 %} B. 多行注释: 选中要注释的若干语句, 编辑器菜单Text->Comment, 或者快捷键Ctrl+R 取消注释: 选中要取消注释 ...
- opencv 3.1.0 访问像素值的三种方法(C++)
三种方法分别问: 指针访问:void colorReduce_ptr(cv::Mat &inputImage, cv::Mat &outputImage, int div); 迭代器访 ...
- opencv图像阈值设置的三种方法
1.简单阈值设置 像素值高于阈值时,给这个像素赋予一个新值(可能是白色),否则我们给它赋予另外一种颜色(也许是黑色).这个函数就是 cv2.threshhold().这个函数的第一个参数就是原图像 ...
- 【Android】Eclipse自动编译NDK/JNI的三种方法
[Android]Eclipse自动编译NDK/JNI的三种方法 SkySeraph Sep. 18th 2014 Email:skyseraph00@163.com 更多精彩请直接访问SkySer ...
随机推荐
- 【C基础】const用法
1.const 和 define 异同 同:const 和 define都是修饰常量 异:const修饰的常量只是编译器的一种优化,它是可以通过内存地址修改const修饰的常量:而define修饰的常 ...
- SecureCRT退出全屏方法
今天在使用SecureCRT的过程中,无意点了全屏,导致SecureCRT连接某台服务器的seesion全屏.后来想退出全屏,SecureCRT没有任何提示,上网查了一下资料说: 退出全屏的命令是AL ...
- journaling保证意外故障下的数据完整性
mongoDB研究笔记:journaling保证意外故障下的数据完整性 mongoDB的Journaling日志功能与常见的log日志是不一样的,mongoDB也有log日志,它只是简单记录了数据 ...
- RTB撕开黑盒子 Part 2: Algorithm Meets World
Part 0介绍了RTB的胜出价格会在凌晨陡升.我们还介绍了一个Pace系统,如果这个系统所有的DSPs都用,那陡升的问题就会消失.Part 0中的系统中含有一个隐式的假设:任何两个请求都认为是相同的 ...
- MyEclipse修改默认的workspace路径
在此只提供一个自己认为可行的办法(已验证可行) 已MyEclipse8.5为例 打开安装路径C:\Program Files\Genuitec\MyEclipse 8.5\configuration下 ...
- jQuery EasyUI 1.3.4 离线API、Demo
[原]jQuery EasyUI 1.3.4 离线API.Demo (最新) 说明 本文下载包为 jQuery EasyUI 1.3.4 离线API.Demo. API 按照分类整理做成了离线版本 ...
- LigerUI权限系统之角色管理
角色管理比前面几个页面都稍显复杂点.好吧,还是先看图. 左边是角色列表,右边是页面列表,它们也是多对多的关系,即一个角色可以访问多个页面,同时一个页面也可以被多个角色访问. 点击左边的角色,刷新右边页 ...
- Docker ( Is docker really better than VM ?)
Docker is so popular. Arha? Let's try! Docker needs the linux kernel shoud be upper than 3.10.x Let' ...
- Starting MySQL.. ERROR! The server quit without updating PID file (/usr/local/mysql/var/AYXXXXXXXXXXX.pid). 错误解决方法
/etc/init.d/mysql start无法启动MySQL错误信息如下: ERROR! MySQL server PID file could not be found! Starting My ...
- 当我们在谈论kmeans(3)
本系列意在长期连载分享,内容上可能也会有所删改: 因此如果转载,请务必保留源地址,非常感谢! 博客园:http://www.cnblogs.com/data-miner/(暂时公式显示有问题) ...