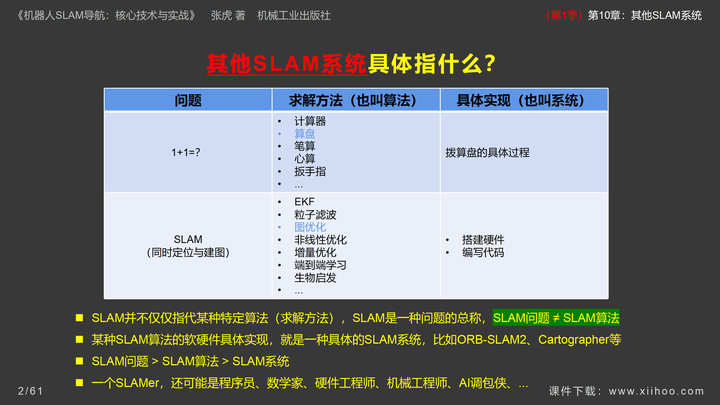
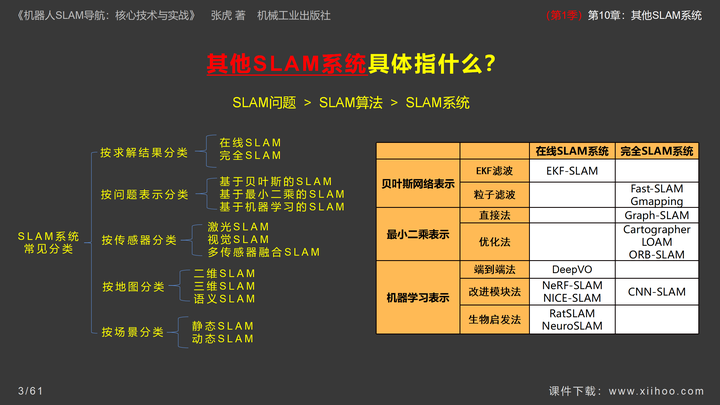
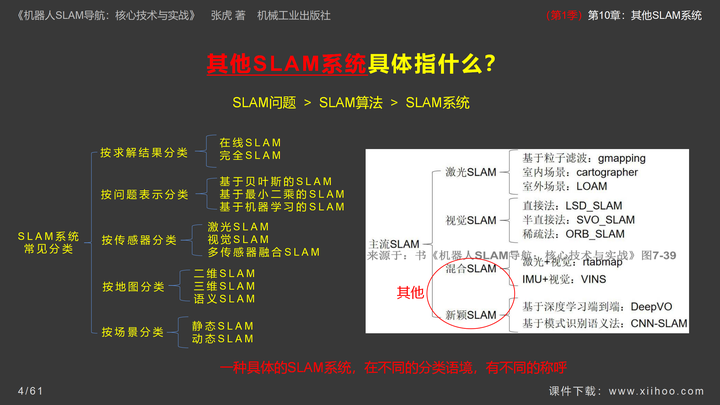
《机器人SLAM导航核心技术与实战》第1季:第10章_其他SLAM系统
- 先 导 课
- 第 1 季 : 快 速 梳 理 知 识 要 点 与 学 习 方 法
- 第 2 季 : 详 细 推 导 数 学 公 式 与 代 码 解 析
- 第 3 季 : 代 码 实 操 以 及 真 实 机 器 人 调 试
- 答 疑 课












- Gitee下载(国内访问速度快):gitee.com/xiihoo-robot/Books_Robot_SLAM_Navigation
《机器人SLAM导航核心技术与实战》第1季:第10章_其他SLAM系统的更多相关文章
- 《机器人SLAM导航核心技术与实战》第1季:第4章_机器人传感器
<机器人SLAM导航核心技术与实战>第1季:第4章_机器人传感器 视频讲解 [第1季]4.第4章_机器人传感器-视频讲解 [第1季]4.1.第4章_机器人传感器_惯性测量单元-视频讲解 [ ...
- 《 .NET并发编程实战》阅读指南 - 第10章
先发表生成URL以印在书里面.等书籍正式出版销售后会公开内容.
- RViz 实时观测机器人建立导航2D封闭空间地图过程 (SLAM) ----27
原创博客:转载请表明出处:http://www.cnblogs.com/zxouxuewei/ ROS提供了非常强大的图形化模拟环境 RViz,这个 RViz 能做的事情非常多.今天我们学习一下如何使 ...
- SLAM+语音机器人DIY系列:(一)Linux基础——2.安装Linux发行版ubuntu系统
摘要 由于机器人SLAM.自动导航.语音交互这一系列算法都在机器人操作系统ROS中有很好的支持,所以后续的章节中都会使用ROS来组织构建代码:而ROS又是安装在Linux发行版ubuntu系统之上的, ...
- 除了ROS, 机器人定位导航还有其他方案吗?
利用ROS进行机器人开发,我想大多数企业是想借助ROS实现机器人的导航.定位与路径规划,它的出现大大降低了机器人领域的开发门槛,开发者无需向前人一样走众多弯路,掌握多种知识才能开始实现机器人设计的梦想 ...
- Elasticsearch核心技术与实战-学习笔记
学习资源: Elasticsearch中文社区日报https://elasticsearch.cn/article/ Elasticsearch 官网 https://www.elastic.co/ ...
- Kafka核心技术与实战,分布式的高性能消息引擎服务
Kafka是LinkedIn开发并开源的一套分布式的高性能消息引擎服务,是大数据时代数据管道技术的首选. 如今的Kafka集消息系统.存储系统和流式处理平台于一身,并作为连接着各种业务前台和数据后台的 ...
- Elasticsearch核心技术与实战,性能是真牛
Elasticsearch 是一款非常强大的开源搜索及分析引擎.结合 Kibana.Logstash和Beats,Elasticsearch 还被广泛运用在大数据近实时分析,包括日志分析.指标监控.信 ...
- .NET Core实战项目之CMS 第十三章 开发篇-在MVC项目结构介绍及应用第三方UI
作为后端开发的我来说,前端表示真心玩不转,你如果让我微调一个位置的样式的话还行,但是让我写一个很漂亮的后台的话,真心做不到,所以我一般会选择套用一些开源UI模板来进行系统UI的设计.那如何套用呢?今天 ...
- php CI 实战教程第一季百度经验杂志
phpCI实战教程第一季_百度经验杂志_百度经验http://jingyan.baidu.com/magazine/16428 杂志为本人php CI实战教程系列经验 从实际项目使用中写系列实战经验, ...
随机推荐
- 数字先锋 | 车企,出海!天翼云AOne擦亮车企“智慧服务”新名片!
近年来,中国汽车市场迎来巨变,消费者的消费习惯不断变迁,价格战愈演愈烈......如何紧跟数字化转型步伐,实现稳健经营,成为车企所面临的时代命题. 作为一家科技型制造企业,某车企主营业务涉及汽车及核心 ...
- Keepalived基本原理
本文分享自天翼云开发者社区<Keepalived基本原理>,作者:Ujnrfc Keepalived简介 Keepalived是Linux下一个轻量级别的高可用解决方案.高可用:广义来讲, ...
- C#正则提取字符串中的数字
首先需要引入命名空间System.Text.RegularExpressions,具体实现如下所示: //提取纯数字,该方式会将所有数字提取出来并拼接在一起,如:"ABC#123@AS456 ...
- linux mint下安装截图工具
在linux下尝试了多款截图工具,综合下来,觉得shutter是最好用的,推荐大家使用. Shutter 是一个强大的截图工具,强大的功能集成到一个直观的简洁界面,应用程序自带多个区域截图(如全屏,选 ...
- 《刚刚问世》系列初窥篇-Java+Playwright自动化测试-12- iframe操作-上篇(详细教程)
1.简介 原估计宏哥这里就不对iframe这个知识点做介绍和讲解了,因为前边的窗口切换就为这种网页处理提供了思路,另一个原因就是虽然iframe很强大,但是现在很少有网站用它了.但是还是有小伙伴或者童 ...
- 流程控制之break、continue和goto
#### 实例1: ```javapackage com.yeyue.struct; public class BreakDemo { public static void main(String[] ...
- WPF DevExpress GridColumn ComboBox 显示选择内容的 TooTip
实现显示当前选择的ComboBox中项的ToolTip信息: 1. 设置 GridColumn 的 CellTemplate 为 ComboBoxEdit , 然后自定义他的 ItemContaine ...
- OpenLayers 4326地图 根据距离设置地图分辨率
问题:给一个距离,如何确定4326地图缩放等级或者分辨率使地图视口范围为这个距离 我本来打算计算从地图视口左上角到右下角的距离来计算地图缩放的,然后发现不好算,我也不会算,于是就计算水平方向距离的缩放 ...
- DataX - [03] 使用案例
题记部分 001 || mysql2hdfs (1)查看MySQL被迁移的数据情况 (2)根据需求确定reader为mysqlreader,writer为hdfswriter 查看reader和wri ...
- luogu-P3343题解
简要题意 给定一张 \(n\) 个点 \(m\) 条边的图,边的边权是 \([0, 1]\) 之间均匀分布的随机实数,且相互独立.求最小生成树的最大边权的期望值. 思路 首先有一个比较神秘的跟概率有关 ...