cartographer 最新版安装测试
在官网的基础上稍加修改,但保证代码都是最新的
我的系统配置: Debian9 strech, ROS lunar 该方法对 ubuntu 系列操作系统以及其他ROS版本同样适用。
1. 安装依赖库
sudo apt-get install -y \
g++ \
git \
google-mock \
libboost-all-dev \
libcairo2-dev \
libeigen3-dev \
libgflags-dev \
libgoogle-glog-dev \
liblua5.2-dev \
libsuitesparse-dev \
ninja-build \
python-sphinx
2. 安装ceres-solver
google提供的地址下载太慢,在github上git clone 也是太慢, 索性直接Donload zip
https://github.com/ceres-solver/ceres-solver.git
然后编译安装:
cd ceres-solver
mkdir build
cd build
cmake ..
make -j4
sudo make install
3. 安装proto3
a. 重要说明: 如果你已经安装了ROS Lunar, 恭喜你,其实你已经安装了protobuf了, 但是你没有安装protobuf-compiler, 你只需要安装一下protobuf-compiler就可以了
sudo apt-get install protobuf-compiler
然后你可以执行 protoc --version 查看protobuf 的版本.
b. 如果你装的是ROS Kinetic, 你的protobuf 的版本应该是 2.x, 需要手动将其升级到 proto3
方法:
下载链接 https://github.com/google/protobuf/releases
官方安装手册:https://github.com/protocolbuffers/protobuf/blob/master/src/README.md
安装:(下载安装all版本)
tar zxvf protobuf-all-3.6.0.tar.gz
cd protobuf-3.6.0/
./configure –prefix=/usr/local/ (安装路径,一般情况下,默认会安装到/usr/include 文件下,我们需要指定安装到,/usr/local/include文件下,安装完成会有一个goole文件在/usr/local/include 下)
make
make check
make install
protoc –version #查看版本
c. 如果你没有装ROS那么执行下面的步骤吧:
安装依赖
sudo apt-get install autoconf automake libtool curl make g++ unzip
方式一(推荐):
sudo apt-get install libprotobuf-dev
sudo apt-get install protobuf-compiler
方式二:
下载zip(git clone 太慢了)
地址: https://github.com/protocolbuffers/protobuf
编译安装:
./autogen.sh
./configure –prefix=/usr/local/
make -j4
make check
sudo make install
sudo ldconfig # refresh shared library cache.
make check 会提示又一些错误,没关系啦,核心库已经编译好啦
4. 安装cartographer
clone cartographer代码,这个速度还可以
git clone https://github.com/googlecartographer/cartographer.git
编译安装
cd cartographer
mkdir build
cd build
cmake ..
make -j4
sudo make install
5. 安装cartographer_ros
这个就简单了,地址:
https://github.com/googlecartographer/cartographer_ros
clone 或者下载到自己的ROS工作空间,编译一下就可以了.
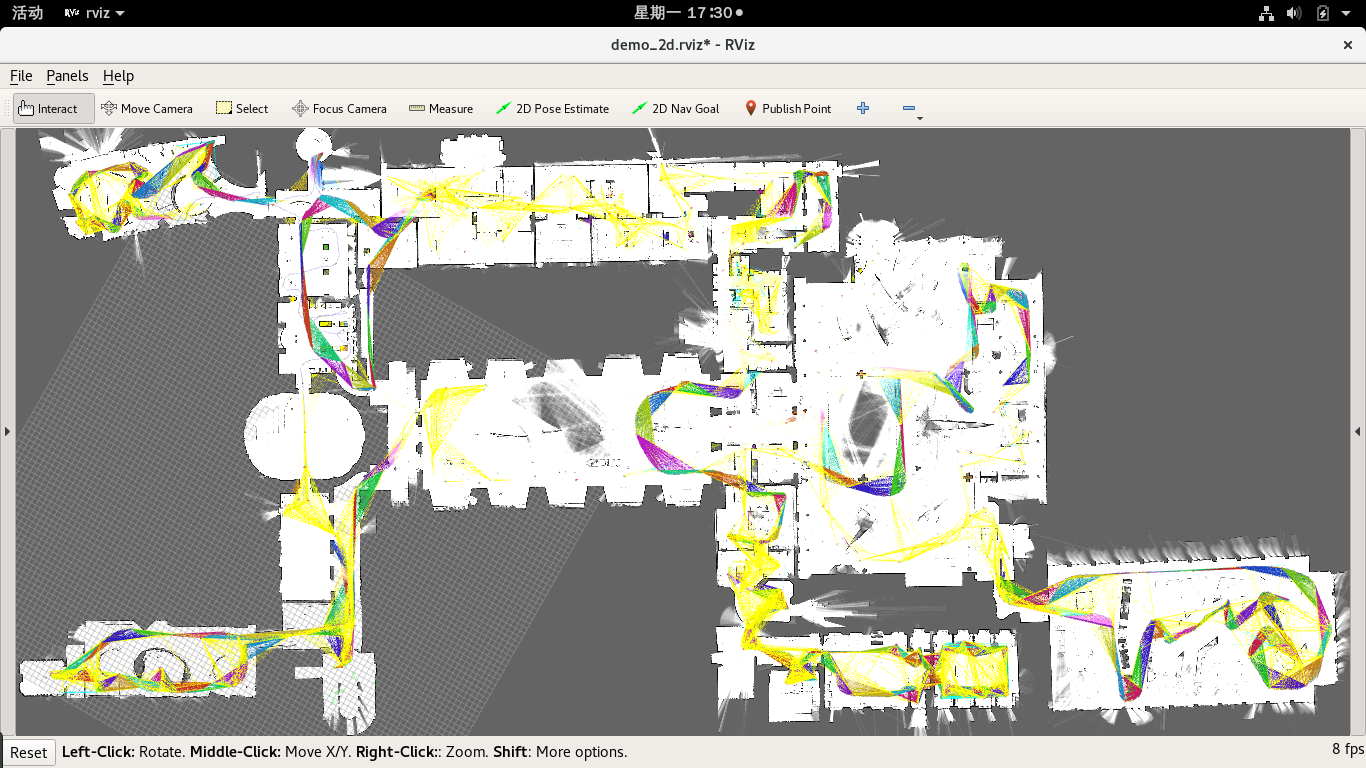
6. 测试
2D:
// launch 2D example
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag
3D:
# Launch the 3D backpack demo.
roslaunch cartographer_ros demo_backpack_3d.launch bag_filename:=${HOME}/Downloads/b3-2016-04-05-14-14-00.bag
OK, 到此结束!
cartographer 最新版安装测试的更多相关文章
- 谷歌Cartographer学习 -快速安装测试
参考资料:https://www.cnblogs.com/hitcm/p/5939507.html PC下面进行安装: 遇到的问题如下 1.首先安装ceres solver 在编译的时候,如果是低配的 ...
- 谷歌Cartographer学习(1)-快速安装测试(转载)
转载自谷歌Cartographer学习(1)-快速安装测试 代码放到个人github上,https://github.com/hitcm/ 如下,需要安装3个软件包,ceres solver.cart ...
- mahout 安装测试
1 下载 在http://archive.apache.org/dist/mahout下载相应版本的mahout 版本,获取官网查看http://mahout.apache.org 相关的信息
- Hbase的安装测试工作
Hbase的安装测试工作: 安装:http://www.cnblogs.com/neverwinter/archive/2013/03/28/2985798.html 测试:http://www.cn ...
- ubuntu下opencv2.4.9安装测试
ubuntu下opencv2.4.9安装测试 whowhoha@outlook.com 一.依赖包安装 1. build-essential 软件包 sudo apt-get install bui ...
- 如何在本地安装测试ECSHOP 转载
如何在本地安装测试ECSHOP 如何在本地(自己的电脑)上先安装ECShop 一.创建PHP环境 1.下载AppServ 因为ECShop在线网上商店系统是用PHP语言开发的,所以,在本地架设网店之前 ...
- ubuntu-10.04的测试环境 安装测试 Coreseek开源中文检索引擎-Sphinx中文版
主要参考文档:http://www.coreseek.cn/products-install/install_on_bsd_linux/ 一. 32位版本: coreseek安装需要预装的软件: ap ...
- Centos 7.3 编译 & 安装 & 测试 facebook faiss
许多 AI 系统训练完毕,正式上线时的基本操作往往可以抽象为:在高维向量空间中,给定一个向量,寻找与之最相近的 k 个向量.当向量数目异常巨大时,如何快速地执行这一基本操作,便成为 AI 系统在工程应 ...
- Python 3.6.3 官网 下载 安装 测试 入门教程 (windows)
1. 官网下载 Python 3.6.3 访问 Python 官网 https://www.python.org/ 点击 Downloads => Python 3.6.3 下载 Python ...
随机推荐
- PHP操作cookie
1.当只有一个参数的时候,默认是删除,响应报文里面设置了一个过去的时间 setcookie('key2'); 2.当有两个参数的时候,是设置cookie setcookie('key','value1 ...
- mysql 遍历所有的库并根据表和sql语句备份
建库.用户语句 create database test_hb; create user ' test_hb'@'%' identified by '123456'; grant all privil ...
- C++ 对象实例化(转)
C++ 对象实例化的一些概念: C++ 如果直接定义类,如classA a; a存在栈上(也意味着复制了对象a在栈中):如果classA a = new classA就存在堆中. 一.new创建类 ...
- 开源实时消息推送系统 MPush
系统介绍 mpush,是一款开源的实时消息推送系统,采用java语言开发,服务端采用模块化设计,具有协议简洁,传输安全,接口流畅,实时高效,扩展性强,可配置化,部署方便,监控完善等特点.同时也是少有的 ...
- web.xml 文件头
Servlet 2.3 <!DOCTYPE web-app PUBLIC "-//Sun Microsystems, Inc.//DTD Web Application 2.3//EN ...
- BBS总结
表设计 from django.db import models from django.contrib.auth.models import AbstractUser # Create your m ...
- 学习总结:CSS(一)定义方式、选择器、选择器权重
一.CSS的定义方式 1.内部样式:<style></style> 2.行间样式:<div style="width:100px;height:100px;&q ...
- 【Unity3d游戏开发】Unity中的Time.timeScale
马三最近在做一款游戏的时候涉及到了“加速”和“暂停”这两个功能,我第一时间就想到了应该用 Time.timeScale.当暂停的时候,设置timeScale = 0,当需要加速的时候,将 timeSc ...
- 深入理解Python异步编程(上)
本文代码整理自:深入理解Python异步编程(上) 参考:A Web Crawler With asyncio Coroutines 一.同步阻塞方式 import socket def blocki ...
- mvn项目压缩打包
通常情况下,maven打包结果为jar或war包.如果需要一并打包配置文件等参数,通过resources配置指定需要打包的文件参数,如下示例: <project> ... <!-- ...