c/c++求解图的关键路径 critical path
c/c++求解图的关键路径 critical path

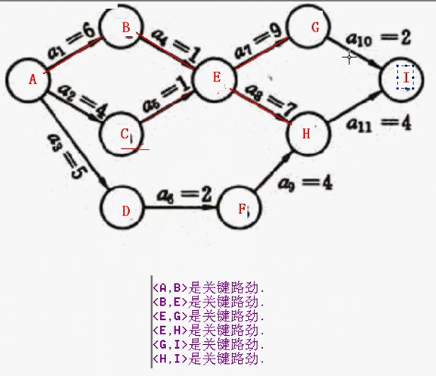
上图表示一个工程,工程以V1为起始子工程,V9为终止子工程。
由图可以看出,要开工V5工程,必须在完成工程V2和V3后才可以。
完成V2需要a1(6)个小时,完成V3需要a2(4)个小时。假设V2和V3同时开工,V3就会提前2个小时完工,但是这时V2还没有完工,所以V5还不能开始。所以为了要开工V5必须V2要完成,V3即使晚开工2个小时,也不会耽误V5的开工,所以V2就是V5的 关键路径(Critical Path)。
有2个问题:(1)完成整个工程至少需要多少时间。(2)哪些子工程是影响总工程进度的关键?
(1)的答案:关键路径上的时间总和是完成整个工程至少需要的时间。
(2)的答案:关键路径上的工程是影响总工程进度的关键。
查找关键路径的目的:
辨别哪些是关键工程,以便争取提高关键工程的效率,缩短整个工期。
从上图可以得知,工程V6延迟3天开工,或者延迟3个完成都不会影响项目的工期,所以V6不在关键路径上。
实现思路:
假设e(i)表示活动a(i)的最早开始时间,在不推迟整个工程完成的前提下,用l(i)表示活动a(i)的最迟开始时间。两者之差表示完成活动a(i)的时间余量。余量为0的活动就是关键活动,所以连接此活动的2个顶点就是关键路径上的顶点。可以看出,即使提前完成非关键活动,也不能加快工程的进度。
辨别关键活动就是要找到e(i) = l(i)的活动。为了求得活动的e(i)和l(i),首先应求得事件(顶点)的最早发生时间ve(i)和最迟发生时间vl(i)。如果活动a(i),由边<j, k>表示,其持续时间记为dut(<j, k>),则有如下公式:
e(i) = ve(i)
l(i) = vl(k) - dut(<j, k>)
ve的求法用拓扑排序
vl的求法用逆拓扑排序
求下图的关键路径
critical_path.h
#ifndef __criticalpath__
#define __criticalpath__
#include <stdio.h>
#include <malloc.h>
#include <assert.h>
#include <memory.h>
#define Default_vertex_size 10
#define T char//dai biao ding dian de lei xing
#define E int
#define MAX_COST 0x7FFFFFFF
typedef struct GraphMtx{
int MaxVertices;//zui da ding dian shu liang]
int NumVertices;//shi ji ding dian shu liang
int NumEdges;//bian de shu lian
T* VerticesList;//ding dian list
int** Edge;//bian de lian jie xin xi, bu shi 0 jiu shi 1
}GraphMtx;
//chu shi hua tu
void init_graph(GraphMtx* gm);
//打印二维数组
void show_graph(GraphMtx* gm);
//插入顶点
void insert_vertex(GraphMtx* gm, T v);
//添加顶点间的线
void insert_edge(GraphMtx* gm, T v1, T v2, E cost);
//取得与v顶点有连线的第一个顶点
int getNeighbor(GraphMtx* gm, T v);
//取得与v1顶点,v1顶点之后的v2顶点的之后的有连线的第一个顶点
int getNextNeighbor(GraphMtx* gm, T v1, T v2);
E getWeight(GraphMtx* g, int v1, int v2);
//求解关键路径
void critical_path(GraphMtx* g);
#endif
critical_path.c
#include "critical_path.h"
void init_graph(GraphMtx* gm){
gm->MaxVertices = Default_vertex_size;
gm->NumEdges = gm->NumVertices = 0;
//kai pi ding dian de nei cun kong jian
gm->VerticesList = (T*)malloc(sizeof(T) * (gm->MaxVertices));
assert(NULL != gm->VerticesList);
//创建二维数组
//让一个int的二级指针,指向一个有8个int一级指针的数组
//开辟一个能存放gm->MaxVertices个int一级指针的内存空间
gm->Edge = (int**)malloc(sizeof(int*) * (gm->MaxVertices));
assert(NULL != gm->Edge);
//开辟gm->MaxVertices组,能存放gm->MaxVertices个int的内存空间
for(int i = 0; i < gm->MaxVertices; ++i){
gm->Edge[i] = (int*)malloc(sizeof(int) * gm->MaxVertices);
}
//初始化二维数组
//让每个顶点之间的边的关系都为不相连的
for(int i = 0; i < gm->MaxVertices; ++i){
for(int j = 0; j < gm->MaxVertices; ++j){
gm->Edge[i][j] = 0;
}
}
}
//打印二维数组
void show_graph(GraphMtx* gm){
printf(" ");
for(int i = 0; i < gm->NumVertices; ++i){
printf("%c ", gm->VerticesList[i]);
}
printf("\n");
for(int i = 0; i < gm->NumVertices; ++i){
//在行首,打印出顶点的名字
printf("%c:", gm->VerticesList[i]);
for(int j = 0; j < gm->NumVertices; ++j){
printf("%d ", gm->Edge[i][j]);
}
printf("\n");
}
printf("\n");
}
//插入顶点
void insert_vertex(GraphMtx* gm, T v){
//顶点空间已满,不能再插入顶点了
if(gm->NumVertices >= gm->MaxVertices){
return;
}
gm->VerticesList[gm->NumVertices++] = v;
}
int getVertexIndex(GraphMtx* gm, T v){
for(int i = 0; i < gm->NumVertices; ++i){
if(gm->VerticesList[i] == v)return i;
}
return -1;
}
//添加顶点间的线
void insert_edge(GraphMtx* gm, T v1, T v2, E cost){
if(v1 == v2)return;
//查找2个顶点的下标
int j = getVertexIndex(gm, v1);
int k = getVertexIndex(gm, v2);
//说明找到顶点了,并且点之间还没有线
if(j != -1 && k != -1 && gm->Edge[j][k] != 1){
//因为是有方向,所以更新1个值
gm->Edge[j][k] = cost;
//边数加一
gm->NumEdges++;
}
}
//取得与某顶点有连线的第一个顶点
int getNeighbor(GraphMtx* gm, T v){
int p = getVertexIndex(gm, v);
if(-1 == p)return -1;
for(int i = 0; i < gm->NumVertices; ++i){
if(gm->Edge[p][i] != 0)
return i;
}
return -1;
}
//取得与v1顶点,v1顶点之后的v2顶点的之后的有连线的第一个顶点
int getNextNeighbor(GraphMtx* gm, T v1, T v2){
if(v1 == v2)return -1;
int p1 = getVertexIndex(gm, v1);
int p2 = getVertexIndex(gm, v2);
if(p1 == -1 || p2 == -1)return -1;
for(int i = p2 + 1; i < gm->NumVertices; ++i){
if(gm->Edge[p1][i] != 0)
return i;
}
return -1;
}
E getWeight(GraphMtx* g, int v1, int v2){
if(v1 == -1 || v2 == -1)return 0;
return g->Edge[v1][v2];
}
//求解关键路径
void critical_path(GraphMtx* g){
int n = g->NumVertices;
//最早开始时间数组
int* ve = (int*)malloc(sizeof(int) * n);
//最晚开始时间数组
int* vl = (int*)malloc(sizeof(int) * n);
assert(NULL != ve && NULL != vl);
for(int i = 0; i < n; ++i){
ve[i] = 0;
vl[i] = MAX_COST;
}
int j, w;
//ve
for(int i = 0; i < n; ++i){
j = getNeighbor(g, g->VerticesList[i]);
while(j != -1){
w = getWeight(g, i, j);
if(ve[i] + w > ve[j]){
ve[j] = ve[i] + w;
}
j = getNextNeighbor(g,g->VerticesList[i],g->VerticesList[j]);
}
}
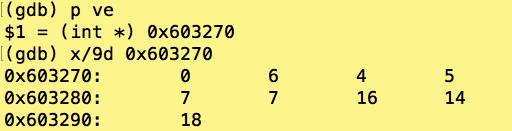
//ve 的结果看下图a
//vl
vl[n-1] = ve[n-1];
for(int i = n - 2; i > 0; --i){
j = getNeighbor(g, g->VerticesList[i]);
while(j != -1){
w = getWeight(g, i, j);
if(vl[j] - w < vl[i]){
vl[i] = vl[j] - w;
}
j = getNextNeighbor(g,g->VerticesList[i],g->VerticesList[j]);
}
}
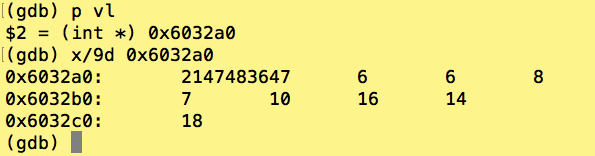
//vl 的结果看下图b
int e, l;
for(int i = 0; i < n; ++i){
j = getNeighbor(g, g->VerticesList[i]);
while(j != -1){
e = ve[i];
l = vl[j] - getWeight(g, i, j);
if(e == l){
printf("<%c, %c>是关键路径\n",g->VerticesList[i],g->VerticesL\
ist[j]);
}
j = getNextNeighbor(g,g->VerticesList[i],g->VerticesList[j]);
}
}
free(ve);
free(vl);
}
图a
图b
critical_path_main.c
#include "critical_path.h"
int main(){
GraphMtx gm;
//初始化图
init_graph(&gm);
//插入顶点
insert_vertex(&gm, 'A');
insert_vertex(&gm, 'B');
insert_vertex(&gm, 'C');
insert_vertex(&gm, 'D');
insert_vertex(&gm, 'E');
insert_vertex(&gm, 'F');
insert_vertex(&gm, 'G');
insert_vertex(&gm, 'H');
insert_vertex(&gm, 'I');
//添加连线
insert_edge(&gm, 'A', 'B', 6);
insert_edge(&gm, 'A', 'C', 4);
insert_edge(&gm, 'A', 'D', 5);
insert_edge(&gm, 'B', 'E', 1);
insert_edge(&gm, 'C', 'E', 1);
insert_edge(&gm, 'D', 'F', 2);
insert_edge(&gm, 'E', 'G', 9);
insert_edge(&gm, 'E', 'H', 7);
insert_edge(&gm, 'F', 'H', 4);
insert_edge(&gm, 'G', 'I', 2);
insert_edge(&gm, 'H', 'I', 4);
//打印图
show_graph(&gm);
//求解关键路径
critical_path(&gm);
}
编译方法:gcc -g critical_path.c critical_path_main.c
c/c++求解图的关键路径 critical path的更多相关文章
- 算法学习记录-图——应用之关键路径(Critical Path)
之前我们介绍过,在一个工程中我们关心两个问题: (1)工程是否顺利进行 (2)整个工程最短时间. 之前我们优先关心的是顶点(AOV),同样我们也可以优先关心边(同理有AOE).(Activity On ...
- Kosaraju算法解析: 求解图的强连通分量
Kosaraju算法解析: 求解图的强连通分量 欢迎探讨,如有错误敬请指正 如需转载,请注明出处 http://www.cnblogs.com/nullzx/ 1. 定义 连通分量:在无向图中,即为连 ...
- Tarjan算法:求解图的割点与桥(割边)
简介: 割边和割点的定义仅限于无向图中.我们可以通过定义以蛮力方式求解出无向图的所有割点和割边,但这样的求解方式效率低.Tarjan提出了一种快速求解的方式,通过一次DFS就求解出图中所有的割点和割边 ...
- 图->有向无环图->求关键路径
文字描述 与AOV-网相对应的是AOE-网(Activity on Edge)即边表示活动的网.AOE-网是一个带权的有向无环图.其中,顶点表示事件Event,弧表示活动,权表示活动持续的时间.通常, ...
- 图的关键路径,AOE,完整实现,C++描述
body, table{font-family: 微软雅黑; font-size: 13.5pt} table{border-collapse: collapse; border: solid gra ...
- 关键路径法(Critical Path Method, CPM)
1.活动节点描述及计算公式 通过分析项目过程中哪个活动序列进度安排的总时差最少来预测项目工期的网络分析. 产生目的:为了解决,在庞大而复杂的项目中,如何合理而有效地组织人力.物力和财力,使之在有限资源 ...
- python利用dijkstra算法求解图中最短距离
利用dijkstra算法,来完成图中两个顶点间最短的距离,可以直接复制使用,只需要修改参数即可 def dijkstra_raw(edges, from_node, to_node): "& ...
- AOV图与拓扑排序&AOE图与关键路径
AOV网:所有的工程或者某种流程可以分为若干个小的工程或阶段,这些小的工程或阶段就称为活动.若以图中的顶点来表示活动,有向边表示活动之间的优先关系,则这样活动在顶点上的有向图称为AOV网. 拓扑排序算 ...
- Tcl与Design Compiler (八)——DC的逻辑综合与优化
本文属于原创手打(有参考文献),如果有错,欢迎留言更正:此外,转载请标明出处 http://www.cnblogs.com/IClearner/ ,作者:IC_learner 对进行时序路径.工作环 ...
随机推荐
- [深度学习] 权重初始化--Weight Initialization
深度学习中的weight initialization对模型收敛速度和模型质量有重要影响! 在ReLU activation function中推荐使用Xavier Initialization的变种 ...
- git 下载部分目录
需求 github上整个工厂比较大,下起来费劲,如何只下载一个单独的文件件呢? 方法一 以:https://github.com/eugenp/tutorials为例,下载其中的 spring-kaf ...
- Go语言远程执行ssh命令简单封装(支持带交互命令)
使用包:golang.org/x/crypto/ssh 以下封装一个发送命令的Cli结构体 type Cli struct { IP string //IP地址 Username string //用 ...
- 使用3D Slicer对图像进行配准
在进行深度学习之前,我们需要图像进行一些预处理操作,其中配准是很重要的一环,以下将介绍使用软件3D Slicer来进行图像配准 3D Slicer是(1)一个软件平台,用以图像分析(包括配准和实时编辑 ...
- IntelliJ IDEA快捷键与使用小技巧
IntelliJ Idea 常用快捷键列表 修改方法如下: 点击 文件菜单(File) –> 点击 设置(Settings… Ctrl+Alt+S), –> 打开设置对话框. 在左侧的导航 ...
- C#基础知识总结(二)
摘要 第二篇主要讲:变量.连接符占位符等.转义字符.数据的计算.数据的转换.try-catch的简单熟悉.复合运算符和自加自减 一.变量 1.数据存储在内存中:内存叫做RAM,内存被分隔为一小格一小格 ...
- [日常] HTTP的缓存
web缓存: 1.可以自动保存常见文档副本的HTTP设备,当web请求抵达缓存时,如果存在缓存副本,就直接从本地存储设备返回,而不是去源服务器获取 2.缓存命中和未命中 3.HTTP再验证,检测服务器 ...
- session图片验证码,页面和请求是两个地址。android手机好用,iphone 失效。
问题描述:之前在H5页面用session做了一个验证码.安卓手机好使.但是到苹果就不好使了(页面访问是一个域名地址,ajax请求是用另外的一个ip地址). 详细说明: 验证码请求后台图片正常显示,an ...
- SQL优化一(SQL使用技巧)
1.行列转换: decode(条件,值1,返回值1,值2,返回值2,...值n,返回值n,缺省值); select decode(sign(变量1-变量2),-1,变量1,变量2) from dual ...
- linux 下 ifcfg-ethx配置和解析
网络接口配置文件[root@localhost ~]# cat /etc/sysconfig/network-scripts/ifcfg-eth0# Intel Corporation 82545EM ...