20189220 余超《Linux内核原理与分析》第三周作业
操作系统如何工作的
第二章的基础知识
- 计算机的三大法宝:存储程序计算机,函数调用堆栈机制,中断。
- 堆栈:堆栈是C语言程序运行时必须使用的几率函数条用路径和参数存储的空间,具体作用分为:记录函数条用的框架,传递函数参数,保存返回的地址,提供函数内部局部变量的存储空间等。
- esp:是栈指针,是cpu机制决定的,push、pop指令会自动调整esp的值。
- ebp:只是存取某时刻的esp,这个时刻就是进入一个函数内后,cpu会将esp的值赋给ebp,此时就可以通过ebp对栈进行操作,比如获取函数参数,局部变量等,实际上使用esp也可以。
- 因为esp在函数运行时会不断的变化,所以保存一个一进入某个函数的esp到ebp中会方便程序员访问参数和局部变量,而且还方便调试器分析函数调用过程中的堆栈情况。前面说了,这个ebp不是必须要有的,你非要使用esp来访问函数参数和局部变量也是可行的,只不过这样会麻烦一些。
- CS:EIP:总是指向下一条指令。
顺序执行:总是执向地址连续的下一条指令
跳转/分支:CS:EIP指向被调用函数的入口地址
call:将当前CS:EIP的值压入栈顶,CS:EIP指向被调用函数的入口地址
ret:从栈顶弹出来原来保存在这里的CS:EIP的值,放入CS:EIP中
内嵌汇编
语法:asm(
汇编语句模板:
输出部分 :
输入部分 :
破坏描述部分:
);
即格式为asm(“statements”:output_regs:input_regs:clobbered_regs);
- 内嵌汇编关键词asm volatile的括号内部第一部分是汇编代码,这里的汇编代码和之前学习的汇编代码有一点点差异,体现在%转义符号。寄存器前面会多一个%的转义符号,有两个%;而%加一个数字这表示第二部分输出,第三部分输入以及第四部分破坏描述。
多道程序内核代码内核分析
我们完成内核调度的主要实现主要是靠三个文件完成:mypcb.h、mymain.c、myinterrupt.c。我们就对他们各自的代码做详细的分析:
mypcb.h:
#define MAX_TASK_NUM 4
#define KERNEL_STACK_SIZE 1024*2 # unsigned long
/* CPU-specific state of this task */
struct Thread {
unsigned long ip;
unsigned long sp;
};
typedef struct PCB{
int pid;
volatile long state; /* -1 unrunnable, 0 runnable, >0 stopped */
unsigned long stack[KERNEL_STACK_SIZE];
/* CPU-specific state of this task */
struct Thread thread;
unsigned long task_entry;
struct PCB *next;
}tPCB;
void my_schedule(void)
- 这段代码主要用于定义进程控制块,也就是进程结构体的定义。struct Thread中定义了两个变量ip和sp,他们是分别用来存储eip和esp。而struct PCB是用来表示进程控制块的,pid表示进程的id,state表示进程的状态,-1表示该进程未运行,0表示正在运行,大于0则表示停止。数组stack[]表示进程堆栈,也表示为内核堆栈,还有就是线程thread以及任务的入口task_entry。还有就是*next连接下一个进程,即用链表把他们链接起来。最后还声明了一个调度器my_schedule。而且最大进程数量MAX_TASK_NUM=4。
mymain.c:
#include <linux/types.h>
#include <linux/string.h>
#include <linux/ctype.h>
#include <linux/tty.h>
#include <linux/vmalloc.h>
#include "mypcb.h"
tPCB task[MAX_TASK_NUM];
tPCB * my_current_task = NULL;
volatile int my_need_sched = 0;
void my_process(void)
void __init my_start_kernel(void)
{
int pid = 0;
int i;
/* Initialize process 0*/
task[pid].pid = pid;
task[pid].state = 0;/* -1 unrunnable, 0 runnable, >0 stopped */
task[pid].task_entry = task[pid].thread.ip = (unsigned long)my_process;
task[pid].thread.sp = (unsigned long)&task[pid].stack[KERNEL_STACK_SIZE-1];
task[pid].next = &task[pid];
/*fork more process */
for(i=1;i<MAX_TASK_NUM;i++)
{
memcpy(&task[i],&task[0],sizeof(tPCB));
task[i].pid = i;
//*(&task[i].stack[KERNEL_STACK_SIZE-1] - 1) = (unsigned long)&task[i].stack[KERNEL_STACK_SIZE-1];
task[i].thread.sp = (unsigned long)(&task[i].stack[KERNEL_STACK_SIZE-1]);
task[i].next = task[i-1].next;
task[i-1].next = &task[i];
}
/* start process 0 by task[0] */
pid = 0;
my_current_task = &task[pid];
asm volatile(
"movl %1,%%esp\n\t" /* set task[pid].thread.sp to esp */
"pushl %1\n\t" /* push ebp */
"pushl %0\n\t" /* push task[pid].thread.ip */
"ret\n\t" /* pop task[pid].thread.ip to eip */
:
: "c" (task[pid].thread.ip),"d" (task[pid].thread.sp) /* input c or d mean %ecx/%edx*/
);
}
int i = 0;
void my_process(void)
{
while(1)
{
i++;
if(i%10000000 == 0)
{
printk(KERN_NOTICE "this is process %d -\n",my_current_task->pid);
if(my_need_sched == 1)
{
my_need_sched = 0;
my_schedule();
}
printk(KERN_NOTICE "this is process %d +\n",my_current_task->pid);
}
}
}
- 这段代码主要是介绍了内核的初始化和0号进程的启动,首先初始化了pid、state、task_entry、thread.ip、thread.sp等信息。进程的入口则是my_process,此时系统中只有0号进程,所以该进程的next还是先指向自己。然后用一个for循环也迅速初始化了其余的三个进程,当他们都处于未运行的状态,且都用链表连接起来的。my_current_task则是记录现在正在运行的进程,汇编代码则是启动0号进程。让esp指向0号进程栈顶(此时也是栈底).,因为是第一次执行,所以esp和ebp指向的是同一个地点。把当前thread.ip入栈,也就是my_process 入口地址。跳转到函数my_process. 除非 my_process 返回, 否则 “popl %%ebp\n\t” 永远不会执行。其中my_need_sched是用来控制调度的标志,在my_process的代码中我们可以看到每执行一千万次打印一次,如果my_need_sched等于1,则执行进程切换的函数my_schedule。
myinterrupt.c:
#include <linux/types.h>
#include <linux/string.h>
#include <linux/ctype.h>
#include <linux/tty.h>
#include <linux/vmalloc.h>
#include "mypcb.h"
extern tPCB task[MAX_TASK_NUM];
extern tPCB * my_current_task;
extern volatile int my_need_sched;
volatile int time_count = 0;
/*
* Called by timer interrupt.
* it runs in the name of current running process,
* so it use kernel stack of current running process
*/
void my_timer_handler(void)
{
#if 1
if(time_count%1000 == 0 && my_need_sched != 1)
{
printk(KERN_NOTICE ">>>my_timer_handler here<<<\n");
my_need_sched = 1;
}
time_count ++ ;
#endif
return;
}
void my_schedule(void)
{
tPCB * next;
tPCB * prev;
if(my_current_task == NULL
|| my_current_task->next == NULL)
{
return;
}
printk(KERN_NOTICE ">>>my_schedule<<<\n");
/* schedule */
next = my_current_task->next;
prev = my_current_task;
if(next->state == 0)/* -1 unrunnable, 0 runnable, >0 stopped */
{
/* switch to next process */
asm volatile(
"pushl %%ebp\n\t" /* save ebp */
"movl %%esp,%0\n\t" /* save esp */
"movl %2,%%esp\n\t" /* restore esp */
"movl $1f,%1\n\t" /* save eip */
"pushl %3\n\t"
"ret\n\t" /* restore eip */
"1:\t" /* next process start here */
"popl %%ebp\n\t"
: "=m" (prev->thread.sp),"=m" (prev->thread.ip)
: "m" (next->thread.sp),"m" (next->thread.ip)
);
my_current_task = next;
printk(KERN_NOTICE ">>>switch %d to %d<<<\n",prev->pid,next->pid);
}
else
{
next->state = 0;
my_current_task = next;
printk(KERN_NOTICE ">>>switch %d to %d<<<\n",prev->pid,next->pid);
/* switch to new process */
asm volatile(
"pushl %%ebp\n\t" /* save ebp */
"movl %%esp,%0\n\t" /* save esp */
"movl %2,%%esp\n\t" /* restore esp */
"movl %2,%%ebp\n\t" /* restore ebp */
"movl $1f,%1\n\t" /* save eip */
"pushl %3\n\t"
"ret\n\t" /* restore eip */
: "=m" (prev->thread.sp),"=m" (prev->thread.ip)
: "m" (next->thread.sp),"m" (next->thread.ip)
);
}
return;
}
- 从这段代码中我们可以看到有两个中断函数:一个是时间中断处理函数my_timer_handler,再另一个就是调度处理函数my_schedule。在my_timer_handler的函数中,通过时钟计数发生1000次且my_need_sched的标志位不等于1就打印一次,并且将标志位重新置位成1,也即是设置时间片的大小,时间片用完了就重新设置一下时间片的调度标志。
- 实验结果截图:
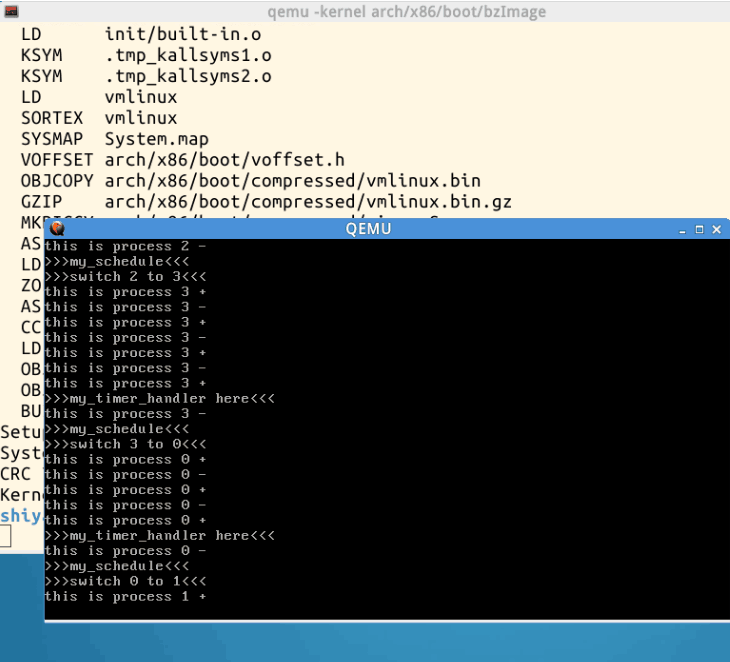
下面重点分析一下两个正在运行的进程做切换的代码:
asm volatile(
"pushl %%ebp\n\t" /* save ebp,保存当前进程的ebp */
"movl %%esp,%0\n\t" /* save esp,保存当前进程的esp到 prev->thread.sp*/
"movl %2,%%esp\n\t" /* restore esp,读取下个进程的esp */
"movl %2,%%ebp\n\t" /* restore ebp ,赋值ebp,使得esp=ebp*/
"movl $1f,%1\n\t" /* save eip ,保存eip,即存储1编号出的指针运行地址到prev->thread.eip中*/
"pushl %3\n\t" /*压入下个进程的ip*/
"ret\n\t" /* restore eip,运行下个进程 */
: "=m" (prev->thread.sp),"=m" (prev->thread.ip)
: "m" (next->thread.sp),"m" (next->thread.ip)
);
- 首先从这段代码中,我们要知道prev->thread.sp表示当前进程的esp值,在代码中为%0,prev->thread.ip表示当前进程的eip值,在代码中表示为%1,next->thread.sp表示下一个进程的esp值,代码里面表示为%2,next->thread.ip表示下一个进程的eip值,代码里面表示的是%3。
- 现在来分析进程切换的堆栈变化:
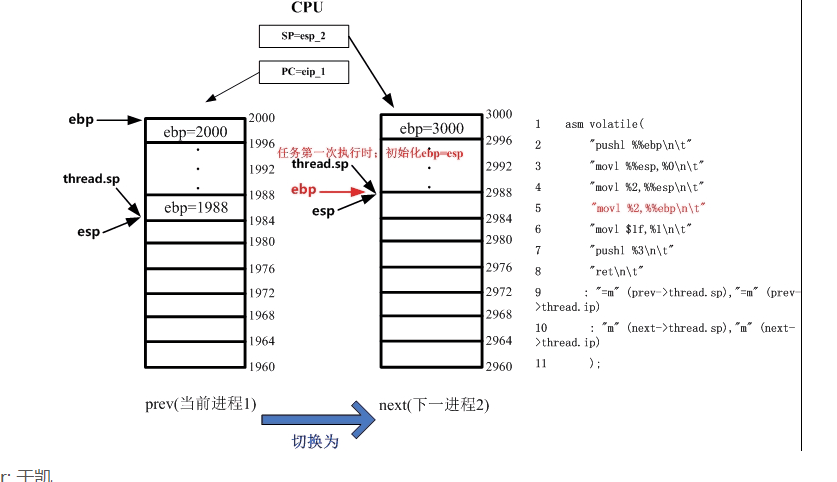
1.初始状态如下:
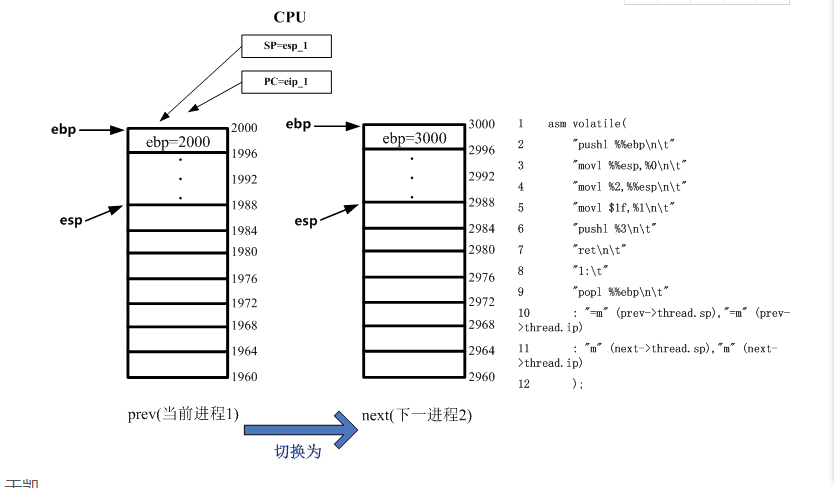
2.执行第一条语句"pushl %%ebp\n\t",将当前进程ebp入栈,esp减4,并且保存好此时进程栈底的底部,也即是保存现场。我们可以看到此时CPU中的SP=esp_1,PC_=eip_1;CPU 按照 PC 指针,到存储器去取指令代码,CPU 按照 SP 指针,到存储器存取地址或数据。

3.执行第二条语句"movl %%esp,%0\n\t" ,这条语句的意义是将当前进程的栈顶指针esp存入当前进程的 thread.sp中。
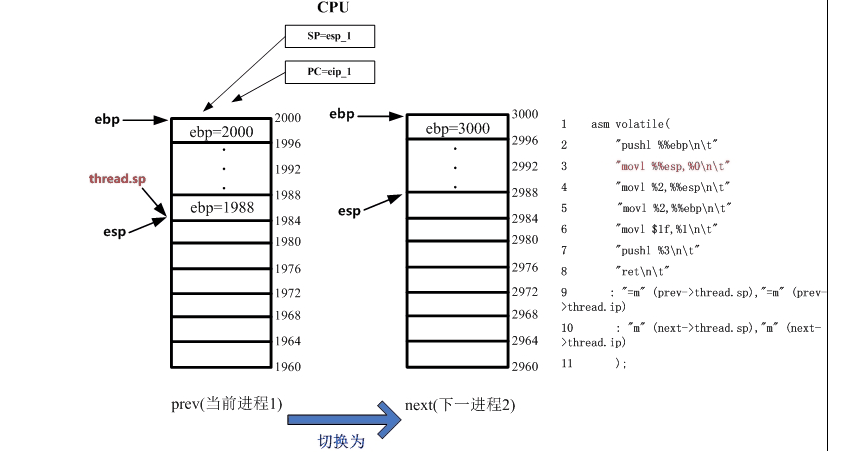
4.执行第三条语句"movl %2,%%esp\n\t",%2代表的是下一个进程esp,也即是将下一个进程的esp的值赋值给当前的esp,栈顶指向了下一个进程的位置。此时CPU的SP=esp_2
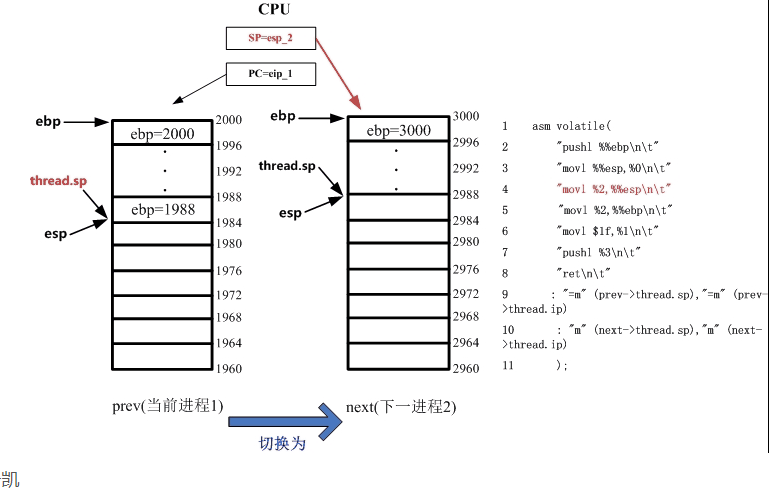
5.执行第四条语句 "movl %2,%%ebp\n\t",在这个地方下一个进程是第一次执行,下一个进程的栈是空栈,所以下一个进程的esp=ebp,也即是这里的%2代表的是将下一个进程的ebp赋值给当前的ebp,堆栈指针指向了下一个进程的位置
6.执行第五条语句 "movl $1f,%1\n\t" ,存储当前进程eip,即进程再一次运行会在此处继续
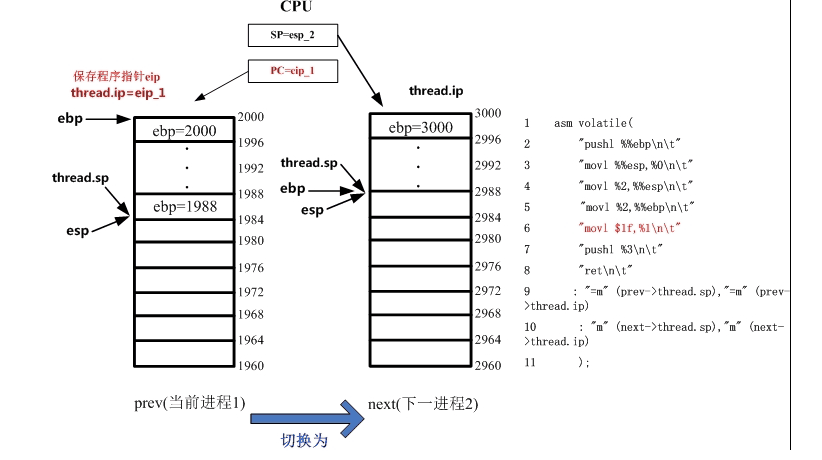
- 执行第六条语句"pushl %3\n\t" ,%3代表的是下一个进程eip,也即是将next->thread.ip压栈

8.执行第七条语句"ret\n\t" ,将下一个进程中堆栈保存的next->thread.ip存到eip寄存器中

总结
- 操作系统首先初始化内核相关的进程,然后开始循环运行这些进程,进程间进行切换时,则利用内核堆栈所保存的每个进程的sp,ip即所对应的%esp,%eip寄存器中的值,对当前的进程的sp,ip即对应%esp,%eip寄存器的值进行保存(中断上下文),并用下一个进程的sp,ip的值赋值给%esp,%eip寄存器(进程间切换)
20189220 余超《Linux内核原理与分析》第三周作业的更多相关文章
- 20169212《Linux内核原理与分析》第二周作业
<Linux内核原理与分析>第二周作业 这一周学习了MOOCLinux内核分析的第一讲,计算机是如何工作的?由于本科对相关知识的不熟悉,所以感觉有的知识理解起来了有一定的难度,不过多查查资 ...
- 20169210《Linux内核原理与分析》第二周作业
<Linux内核原理与分析>第二周作业 本周作业分为两部分:第一部分为观看学习视频并完成实验楼实验一:第二部分为看<Linux内核设计与实现>1.2.18章并安装配置内核. 第 ...
- 2018-2019-1 20189221 《Linux内核原理与分析》第九周作业
2018-2019-1 20189221 <Linux内核原理与分析>第九周作业 实验八 理理解进程调度时机跟踪分析进程调度与进程切换的过程 进程调度 进度调度时机: 1.中断处理过程(包 ...
- 2017-2018-1 20179215《Linux内核原理与分析》第二周作业
20179215<Linux内核原理与分析>第二周作业 这一周主要了解了计算机是如何工作的,包括现在存储程序计算机的工作模型.X86汇编指令包括几种内存地址的寻址方式和push.pop.c ...
- 2019-2020-1 20199329《Linux内核原理与分析》第九周作业
<Linux内核原理与分析>第九周作业 一.本周内容概述: 阐释linux操作系统的整体构架 理解linux系统的一般执行过程和进程调度的时机 理解linux系统的中断和进程上下文切换 二 ...
- 2019-2020-1 20199329《Linux内核原理与分析》第二周作业
<Linux内核原理与分析>第二周作业 一.上周问题总结: 未能及时整理笔记 Linux还需要多用 markdown格式不熟练 发布博客时间超过规定期限 二.本周学习内容: <庖丁解 ...
- 2019-2020-1 20209313《Linux内核原理与分析》第二周作业
2019-2020-1 20209313<Linux内核原理与分析>第二周作业 零.总结 阐明自己对"计算机是如何工作的"理解. 一.myod 步骤 复习c文件处理内容 ...
- 2018-2019-1 20189221《Linux内核原理与分析》第一周作业
Linux内核原理与分析 - 第一周作业 实验1 Linux系统简介 Linux历史 1991 年 10 月,Linus Torvalds想在自己的电脑上运行UNIX,可是 UNIX 的商业版本非常昂 ...
- 《Linux内核原理与分析》第一周作业 20189210
实验一 Linux系统简介 这一节主要学习了Linux的历史,Linux有关的重要人物以及学习Linux的方法,Linux和Windows的区别.其中学到了LInux中的应用程序大都为开源自由的软件, ...
- 2018-2019-1 20189221《Linux内核原理与分析》第二周作业
读书报告 <庖丁解牛Linux内核分析> 第 1 章 计算工作原理 1.1 存储程序计算机工作模型 1.2 x86-32汇编基础 1.3汇编一个简单的C语言程序并分析其汇编指令执行过程 因 ...
随机推荐
- 要想获取select的值,使用ng-modle,否则无法获取select 的值
ng-bind是从$scope -> view的单向绑定 ng-modle是$scope <-> view的双向绑定 <form role="form" c ...
- ORACLE SQL 笔记
根据数据权限查询 SELECT * FROM ( SELECT ROWNUM AS ROWNO, AA.* FROM ( SELECT DISTINCT A.OBJECTID InstanceID , ...
- I2C总线
PHILIPS公司开发的两线式串行总线 GPIO模拟i2c驱动中有自己的一套传输算法.GPIO模拟I2C是要占用CPU资源的,而用I2C芯片是不占CPU资源的 特点 接口线少,控制方式简单,器件封装形 ...
- nginx服务器除了更目录可以访问,其他都出现404
配置如下: listen 80; server_name www.hongtaofei.com; location / { root /home/www/shop/public; index inde ...
- ajax 传递数组参数
一.ajax 传递数组参数 需要添加: traditional: true, let typeIDArr = [,,,,,]; var that = this; var url = '@Url.Act ...
- Ubuntu16.04 网络配置
Ubuntu 网络配置 安装Ubuntu操作系统之后,为了通过Xshell连接主机,或者连接其他主机.需要进行如下网络配置和ssh服务配置. 1 网络配置 1.1 修改网络配置信息 sudo vi / ...
- 你真的会使用 VMware Workstation 吗
你真的会使用VMware Workstation吗?网上有很多教程,虽然都还可以,但总感觉差强人意.所以笔者在这里分享自己的使用心得,让大家参考一下,个人认为是最好的了. 简介 VMware Work ...
- PostgreSQL数据库安装
PostgreSQL数据库安装 postgresqllinux9.6.0 2018年01月31日 10时53分13秒 编译以及安装 源码编译 程序安装 数据库的启动和停止 启动数据库 关闭数据库 数据 ...
- springboot 2.2.1默认跳到登录页
最新的springboot 2.2.1版本,启动之后访问http://localhost:8080 会直接跳转到默认登录页,是由于springboot默认配置了安全策略,在启动类中忽略该配置即可 在启 ...
- Linux常用命令学习一
rpm -qa |grep jdk:查询系统中是否有存在jdk的rpm已安装程序: rpm -e --nodeps jdk1.8:卸载jdk1.8的程序: rpm -ivh rpm文件:安装rpm文件 ...