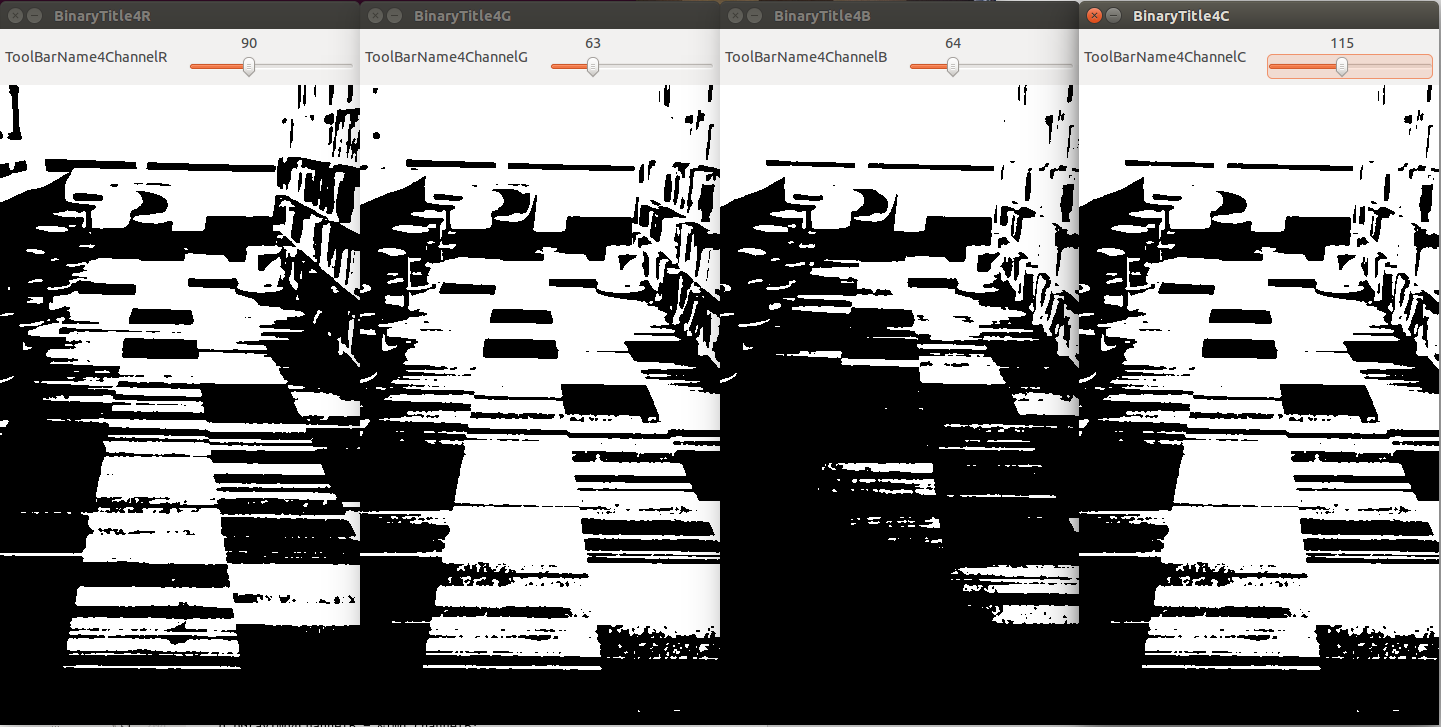
[OpenCV] Samples 16: Decompose and Analyse RGB channels
物体的颜色特征决定了灰度处理不是万能,对RGB分别处理具有相当的意义。
#include <iostream>
#include <stdio.h>
#include "cv.h"
#include <highgui.h>
#include <opencv2/opencv.hpp>
#include <opencv2/legacy/legacy.hpp>
#include <opencv2/nonfree/nonfree.hpp>
#include <opencv2/nonfree/features2d.hpp>
#include <opencv2/flann/flann.hpp> using namespace std;
using namespace cv; #define PATH_IMG01 "../lolo.jpg" IplImage *g_pGrayImage = NULL;
IplImage *g_pGrayImg4ChannelR = NULL;
IplImage *g_pGrayImg4ChannelG = NULL;
IplImage *g_pGrayImg4ChannelB = NULL; IplImage *g_pBinaryImg4ChannelR = NULL;
IplImage *g_pBinaryImg4ChannelG = NULL;
IplImage *g_pBinaryImg4ChannelB = NULL;
IplImage *g_pBinaryImg4ChannelC = NULL; const char *pstrWindowsToolBarName4ChB = "ToolBarName4ChannelB";
const char *pstrWindowsToolBarName4ChG = "ToolBarName4ChannelG";
const char *pstrWindowsToolBarName4ChR = "ToolBarName4ChannelR";
const char *pstrWindowsToolBarName4ChC = "ToolBarName4ChannelC"; const char *pstrWindowsSrcTitle = "SrcImageTitle";
const char *pstrWindowsBinaryTitle4ChB = "BinaryTitle4B";
const char *pstrWindowsBinaryTitle4ChG = "BinaryTitle4G";
const char *pstrWindowsBinaryTitle4ChR = "BinaryTitle4R";
const char *pstrWindowsBinaryTitle4ChC = "BinaryTitle4C"; const char *pstr_title_chB = "Binary Image for Channel B";
const char *pstr_title_chG = "Binary Image for Channel G";
const char *pstr_title_chR = "Binary Image for Channel R"; void on_trackbar_channelB(int pos)
{
Mat src = Mat(g_pGrayImg4ChannelB);
Mat dst;
IplImage img_out; ////////////////////////////////////////////////////////
GaussianBlur(src,dst,Size(,),,);
// medianBlur(src,dst,10);
// blur(src,dst,Size(5,5),Point(-1,-1));
// bilateralFilter(src,dst,25, 25*2, 25/2);
img_out = IplImage(dst);
//////////////////////////////////////////////////////// // (1)
cvThreshold(&img_out, g_pBinaryImg4ChannelB, pos, , CV_THRESH_BINARY); // (2)
int gap = ;
IplImage *pBinaryImg4ChannelB = cvCreateImage(cvGetSize(g_pGrayImg4ChannelB), IPL_DEPTH_8U, );
cvThreshold(&img_out, pBinaryImg4ChannelB, pos + gap, , CV_THRESH_BINARY); // (3)
IplImage *pBinaryImg4ChannelB_DV = cvCreateImage(cvGetSize(g_pBinaryImg4ChannelB), IPL_DEPTH_8U, );
cvAbsDiff(g_pBinaryImg4ChannelB, pBinaryImg4ChannelB, pBinaryImg4ChannelB_DV);
// cvShowImage(pstrWindowsBinaryTitle4ChB, pBinaryImg4ChannelB_DV);
cvShowImage(pstrWindowsBinaryTitle4ChB, g_pBinaryImg4ChannelB);
} void on_trackbar_channelG(int pos)
{
Mat src = Mat(g_pGrayImg4ChannelG);
Mat dst;
IplImage img_out; ////////////////////////////////////////////////////////
GaussianBlur(src,dst,Size(,),,);
img_out = IplImage(dst);
//////////////////////////////////////////////////////// // (1)
cvThreshold(&img_out, g_pBinaryImg4ChannelG, pos, , CV_THRESH_BINARY); // (2)
int gap = ;
IplImage *pBinaryImg4ChannelG = cvCreateImage(cvGetSize(g_pGrayImg4ChannelG), IPL_DEPTH_8U, );
cvThreshold(&img_out, pBinaryImg4ChannelG, pos + gap, , CV_THRESH_BINARY); // (3)
IplImage *pBinaryImg4ChannelG_DV = cvCreateImage(cvGetSize(g_pBinaryImg4ChannelG), IPL_DEPTH_8U, );
cvAbsDiff(g_pBinaryImg4ChannelG, pBinaryImg4ChannelG, pBinaryImg4ChannelG_DV);
// cvShowImage(pstrWindowsBinaryTitle4ChG, pBinaryImg4ChannelG_DV);
cvShowImage(pstrWindowsBinaryTitle4ChG, g_pBinaryImg4ChannelG);
} void on_trackbar_channelR(int pos)
{
Mat src = Mat(g_pGrayImg4ChannelR);
Mat dst;
IplImage img_out; ////////////////////////////////////////////////////////
GaussianBlur(src,dst,Size(,),,);
img_out = IplImage(dst);
// cvShowImage( "Task 8*: Gaussian Blur", &img_out);
// cvWaitKey(0);
//////////////////////////////////////////////////////// // (1)
cvThreshold(&img_out, g_pBinaryImg4ChannelR, pos, , CV_THRESH_BINARY); // (2)
int gap = ;
IplImage *pBinaryImg4ChannelR = cvCreateImage(cvGetSize(g_pGrayImg4ChannelR), IPL_DEPTH_8U, );
cvThreshold(&img_out, pBinaryImg4ChannelR, pos + gap, , CV_THRESH_BINARY); // (3)
IplImage *pBinaryImg4ChannelR_DV = cvCreateImage(cvGetSize(g_pBinaryImg4ChannelR), IPL_DEPTH_8U, );
cvAbsDiff(g_pBinaryImg4ChannelR, pBinaryImg4ChannelR, pBinaryImg4ChannelR_DV);
// cvShowImage(pstrWindowsBinaryTitle4ChR, pBinaryImg4ChannelR_DV);
cvShowImage(pstrWindowsBinaryTitle4ChR, g_pBinaryImg4ChannelR);
} void on_trackbar_channelC(int pos)
{
cvOr(g_pBinaryImg4ChannelB, g_pBinaryImg4ChannelG, g_pBinaryImg4ChannelC);
cvOr(g_pBinaryImg4ChannelC, g_pBinaryImg4ChannelR, g_pBinaryImg4ChannelC); cvShowImage(pstrWindowsBinaryTitle4ChC, g_pBinaryImg4ChannelC);
} int main(void)
{
// 1. src image and resize.
Mat src = imread(PATH_IMG01);
const int zoom = ;
resize(src, src, Size(src.cols/zoom, src.rows/zoom)); IplImage srcImage = IplImage(src);
IplImage *pSrcImage = &srcImage; // 2. split r, g, b channel images.
Mat channel[]; split(pSrcImage, channel); // imshow("B",channel[0]);
// imshow("G",channel[1]);
// imshow("R",channel[2]);
// waitKey(0); IplImage img_channelB = IplImage(channel[]);
IplImage img_channelG = IplImage(channel[]);
IplImage img_channelR = IplImage(channel[]); g_pGrayImg4ChannelB = &img_channelB;
g_pGrayImg4ChannelG = &img_channelG;
g_pGrayImg4ChannelR = &img_channelR; // 3. get r, g, b binary images.
g_pBinaryImg4ChannelB = cvCreateImage(cvGetSize(g_pGrayImg4ChannelB), IPL_DEPTH_8U, );
g_pBinaryImg4ChannelG = cvCreateImage(cvGetSize(g_pGrayImg4ChannelG), IPL_DEPTH_8U, );
g_pBinaryImg4ChannelR = cvCreateImage(cvGetSize(g_pGrayImg4ChannelR), IPL_DEPTH_8U, ); // 4.1 show src image.
cvNamedWindow(pstrWindowsSrcTitle, CV_WINDOW_AUTOSIZE);
cvShowImage(pstrWindowsSrcTitle, pSrcImage); // 4.2 create r, g, b windows.
cvNamedWindow(pstrWindowsBinaryTitle4ChB, CV_WINDOW_AUTOSIZE);
cvNamedWindow(pstrWindowsBinaryTitle4ChG, CV_WINDOW_AUTOSIZE);
cvNamedWindow(pstrWindowsBinaryTitle4ChR, CV_WINDOW_AUTOSIZE); // 4.3 create toolbar for r, g, b windows.
int nThreshold = ;
cvCreateTrackbar(pstrWindowsToolBarName4ChB, pstrWindowsBinaryTitle4ChB, &nThreshold, , on_trackbar_channelB);
cvCreateTrackbar(pstrWindowsToolBarName4ChG, pstrWindowsBinaryTitle4ChG, &nThreshold, , on_trackbar_channelG);
cvCreateTrackbar(pstrWindowsToolBarName4ChR, pstrWindowsBinaryTitle4ChR, &nThreshold, , on_trackbar_channelR); // 4.4 create combine result show.
g_pBinaryImg4ChannelC = cvCreateImage(cvGetSize(g_pGrayImg4ChannelR), IPL_DEPTH_8U, );
cvNamedWindow(pstrWindowsBinaryTitle4ChC, CV_WINDOW_AUTOSIZE);
cvCreateTrackbar(pstrWindowsToolBarName4ChC, pstrWindowsBinaryTitle4ChC, &nThreshold, , on_trackbar_channelC); // 4.5 run.
on_trackbar_channelB();
on_trackbar_channelG();
on_trackbar_channelR();
on_trackbar_channelC(); cvWaitKey(); // 5. destroy trash.
cvDestroyWindow(pstrWindowsSrcTitle);
cvDestroyWindow(pstrWindowsBinaryTitle4ChB);
cvDestroyWindow(pstrWindowsBinaryTitle4ChG);
cvDestroyWindow(pstrWindowsBinaryTitle4ChR);
cvDestroyWindow(pstrWindowsBinaryTitle4ChC); cvReleaseImage(&pSrcImage);
cvReleaseImage(&g_pBinaryImg4ChannelB);
cvReleaseImage(&g_pBinaryImg4ChannelG);
cvReleaseImage(&g_pBinaryImg4ChannelR);
cvReleaseImage(&g_pBinaryImg4ChannelC); return ;
}
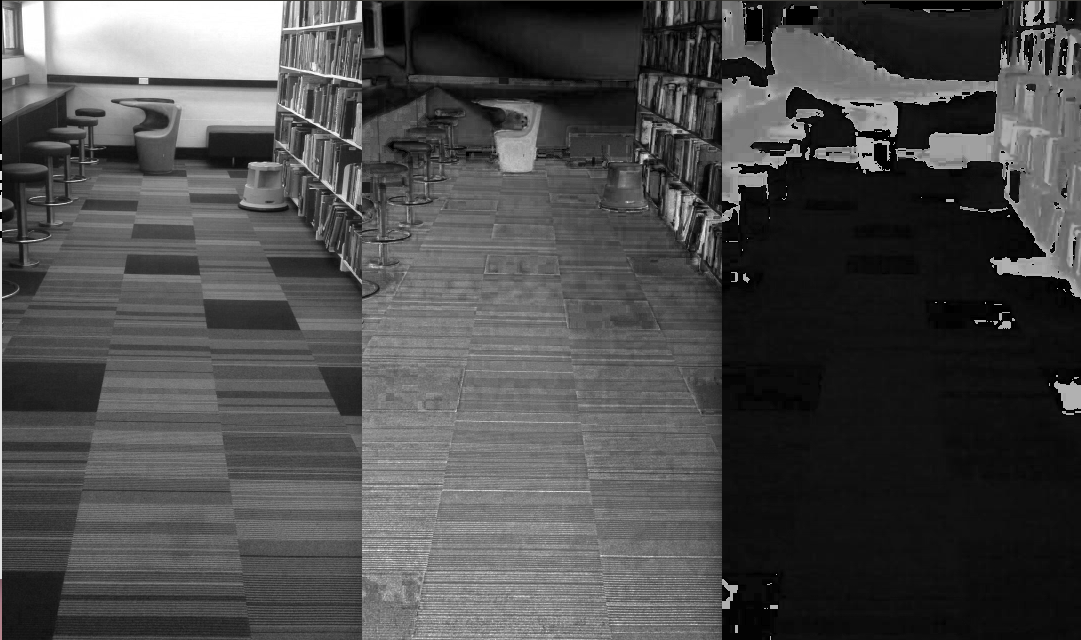
HSV channels 能更好地解决问题? 亮度60-80之间是一个不错的判定效果。

IplImage* pSrcHsv=cvCreateImage(cvGetSize(pSrcImage),IPL_DEPTH_8U,);
cvCvtColor(pSrcImage, pSrcHsv, CV_BGR2HSV); Mat channel[];
split(pSrcHsv, channel);
相关代码
通过亮度通道进行二值刷选后,再采用轮廓线判断继续缩小范围。
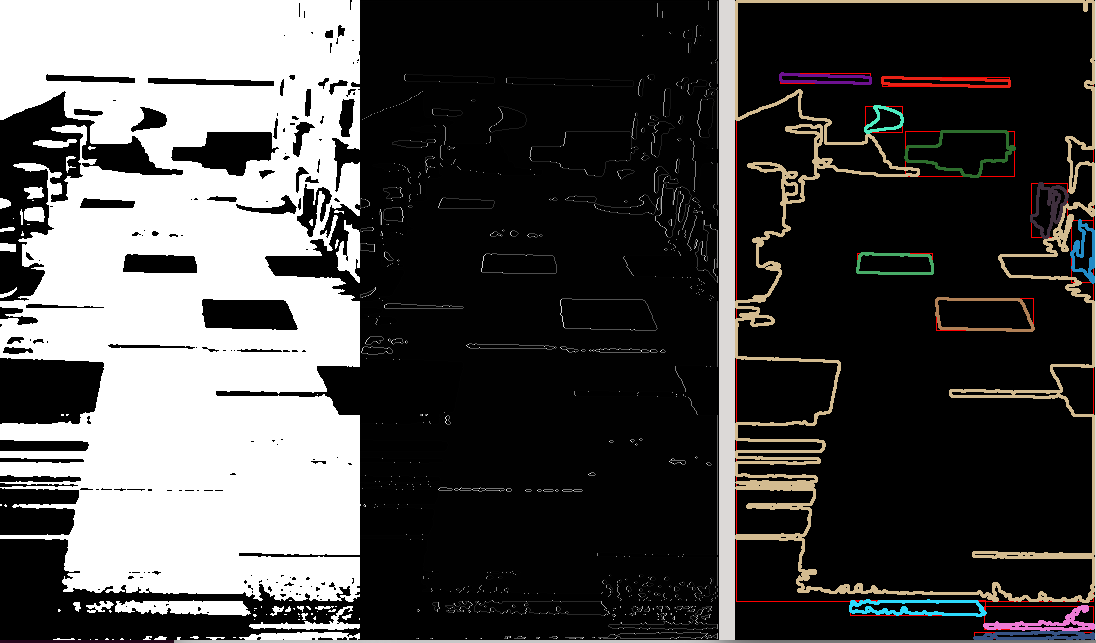
是否有判别基本几何形状的高效方法,找出其中的凸四边形?
Sol 01: “面积比”: size of contour/size of its bounding rectangle
[OpenCV] Samples 04: contours2
[OpenCV] Samples 05: convexhull
[OpenCV] Samples 16: Decompose and Analyse RGB channels的更多相关文章
- OpenCV中对Mat里面depth,dims,channels,step,data,elemSize和数据地址计算的理解
原文:OpenCV中对Mat里面depth,dims,channels,step,data,elemSize和数据地址计算的理解 Title : cv::Mat depth/dims/channels ...
- [OpenCV] Samples 10: imagelist_creator
yaml写法的简单例子.将 $ ./ 1 2 3 4 5 命令的参数(代表图片地址)写入yaml中. 写yaml文件. 参考:[OpenCV] Samples 06: [ML] logistic re ...
- JS-011-颜色进制转换(RGB转16进制;16进制转RGB)
在网页开发的时候,经常需要进行颜色设置,因而经常需要遇到进行颜色进制转换的问题,例如:RGB转16进制:16进制转RGB),前几天在测试的时候,发现网站的颜色进制转换某类16进制颜色(例如:#0000 ...
- js 颜色16进制转RGB方法
//颜色16进制转RGB方法 String.prototype.colorRgb = function(){ var sColor = this.toLowerCase(); //十六进制颜色值的正则 ...
- bgcolor RGB 和16进制之间的转换,16进制转RGB,源码
<p>bgcolor RGB 和16进制之间的转换,16进制转RGB,源码例如:<br /> 输入 201,255,201 转换成 #C9FFC9</p> < ...
- JS实现16进制和RGB转换
作为前端开发而言,不可避免的会遇到颜色取值,字符串和数字直接的转换,博主为此写了一个小工具,实现色值之间的在线转换. 前置知识点: parseInt, toString parseInt(value ...
- OpenCV中对Mat里面depth,dims,channels,step,data,elemSize和数据地址计算的理解 (转)
cv::Matdepth/dims/channels/step/data/elemSizeThe class Mat represents an n-dimensional dense numeric ...
- 访问图像中的像素[OpenCV 笔记16]
再更一发好久没更过的OpenCV,不过其实写到这个部分对计算机视觉算法有所了解的应该可以做到用什么查什么了,所以后面可能会更的慢一点吧,既然开了新坑,还是机器学习更有研究价值吧... 图像在内存中的存 ...
- OpenCV 学习笔记(9)RGB转换成灰度图像的一个常用公式Gray = R*0.299 + G*0.587 + B*0.114
https://blog.csdn.net/fly_wt/article/details/86432886 RGB转换成灰度图像的一个常用公式是:Gray = R*0.299 + G*0.587 + ...
随机推荐
- git 快照及分支
分支介绍 分支就是科幻电影里面的平行宇宙,当你正在电脑前努力学习Git的时候,另一个你正在另一个平行宇宙里努力学习SVN. 如果两个平行宇宙互不干扰,那对现在的你也没啥影响.不过,在某个时间点,两个平 ...
- CocosCreator的Sprite的更换
先上图,左侧是运行的效果, cc.Class({ extends: cc.Component, /* * cocos creator动态更换纹理 *方法一,预先在编辑器里设置好所有的纹理,绑定到对应的 ...
- 分布式队列ZooKeeper的实现
一.背景 有一些时候,多个团队需要共同完成一个任务,比如,A团队将Hadoop集群计算的结果交给B团队继续计算,B完成了自己任务再交给C团队继续做.这就有点像业务系统的工作流一样,一环一环地传下 去, ...
- uva 10816 Travel in Desert(简单的好题~两种方法)
题意: 给出 一个图 点与点之间的路径上有两个权值 路径长度和温度 要求在所走路径中的温度的最大值最小的前提下 走最短路径 解题思路1: 首先用 最小生成树 的方法走出 最小瓶颈路 .把在这期间用到的 ...
- ZegGraph属性含义
一.主要内容概念 属性名称 属性值.作用 MasterPane 一个类对象管理多个GraphPane来源于PaneBase.使用MasterPane类都是可选的,GraphPane类可以直接用于一个单 ...
- 从安装node js到构建一个vue并启动它
1.安装node js 下载地址:http://nodejs.cn/download/2.安装完成后运行Node.js command prompt(node -v查看安装版本) 3.安装npm(由于 ...
- js 获取浏览器/网页宽度高度整理
网页宽度.高度: 网页可见区域宽: document.body.clientWidth 网页可见区域高: document.body.clientHeight 网页可见区域宽: document.bo ...
- MAC常用软件推荐
SQL建模 http://dbwrench.com/download/install/mac_install.shtml 参考https://github.com/helantao/macOS/blo ...
- [Python设计模式] 第10章 怎么出试卷?——模版方法模式
github地址:https://github.com/cheesezh/python_design_patterns 题目 小时候数学老师的随堂测验,都是老师在黑板上写题目,学生在下边抄,然后再做题 ...
- c++设计一个无法被继承的类
要求是该类不能被继承,但是能够像正常的类一样使用.那么一下方法就不符合题目要求: 1.构造函数和析构函数设置为private.这样就不能定义一个类的实例 2.类似于singleton模式那样,定义一个 ...