Camera | 4.瑞芯微平台MIPI摄像头应用程序编写
前面3篇我们讲解了camera的基础概念,MIPI协议,CSI2,常用命令等,本文带领大家入门,如何用c语言编写应用程序来操作摄像头。
Linux下摄像头驱动都是基于v4l2架构,要基于该架构编写摄像头的应用程序,必须先要搞清楚什么是v4l2。
1. 什么是v4l2
v4l2是video for Linux 2的缩写,是一套Linux内核视频设备的驱动框架,该驱动框架为应用层提供一套统一的操作接口(一系列的ioctl)
https://linuxtv.org/downloads/legacy/video4linux/API/V4L2_API/
官网有一个简单的用于抓图的程序capture.c。
本文后面基于该实例编写一个最简单的抓图程序。
v4l2接口
V4L2 :video for linux 2 ,是 linux ⾥⼀套标准的视频驱动,让应⽤层可以像访问普通⽂件⼀样对/dev/videoX 节点进⾏ open 、 read 、 ioctl 等操作。
V4L2在设计时,是要支持很多广泛的设备的,它们之中只有一部分在本质上是真正的视频设备,可以支持多种设备,它可以有以下几种接口:
1. video capture interface(捕获):
视频采集接口,这种接口应用于摄像头,v4l2在最初设计的时候就是应用于这种功能
2. video output interface(输出):
视频输出接口,将静止图像或图像序列编码为模拟视频信号,通过此接口,应用程序可以控制编码过程并将图像从用户空间移动到驱动程序
3. video overlay interface(预览):
视频直接传输接口,可以将采集到的视频数据直接传输到显示设备,不需要cpu参与,这种方式的显示图像的效率比其他方式高得多
本文主要讲解如何使用capture功能。
2. 截取图象的3种方法
1)用mmap(内存映射)方式截取视频
mmap( )系统调用使得进程之间通过映射同一个普通文件实现共享内存。普通文件被映射到进程地址空间后,进程可以向访问普通内存一样对文件进行访问,不必再调用read(),write()等操作。
两个不同进程A、B共享内存的意思是,同一块物理内存被映射到进程A、B各自的进程地址空间。进程A可以即时看到进程B对共享内存中数据的更新,反之亦然
采用共享内存通信的一个显而易见的好处是效率高,因为进程可以直接读写内存,而不需要任何数据的拷贝
*(1)设置picture的属性
*(2) 初始化video_mbuf,以得到所映射的buffer的信息
ioctl(vd->fd, VIDIOCGMBUF, &(vd->mbuf))
*(3)可以修改video_mmap和帧状态的当前设置
Eg. vd->mmap.format = VIDEO_PALETTE_RGB24
vd->framestat[0] = vd->framestat[1] = 0; vd->frame = 0;
*(4)将mmap与video_mbuf绑定
void* mmap ( void * addr , size_t len , int prot , int flags , int fd , off_t offset )
len //映射到调用进程地址空间的字节数,它从被映射文件开头offset个字节开始算起
Prot //指定共享内存的访问权限 PROT_READ(可读), PROT_WRITE (可写), PROT_EXEC (可执行)
flags // MAP_SHARED MAP_PRIVATE中必选一个 // MAP_ FIXED不推荐使用addr //共内存享的起始地址,一般设0,表示由系统分配
Mmap( ) 返回值是系统实际分配的起始地址
if((vd->map = (unsigned char*)mmap(0, vd->mbuf.size, PROT_READ|PROT_WRITE, MAP_SHARED, vd->fd, 0)) < 0)
{
perror("v4l_mmap mmap:");
return -1;
}
*(5)Mmap方式下真正做视频截取的 VIDIOCMCAPTURE
ioctl(vd->fd, VIDIOCMCAPTURE, &(vd->mmap)) ;
若调用成功,开始一帧的截取,是非阻塞的,
是否截取完毕留给VIDIOCSYNC来判断
*(6)调用VIDIOCSYNC等待一帧截取结束
if(ioctl(vd->fd, VIDIOCSYNC, &frame) < 0)
{
perror("v4l_sync:VIDIOCSYNC");
return -1;
}
若成功,表明一帧截取已完成。可以开始做下一次 VIDIOCMCAPTURE
frame是当前截取的帧的序号。
关于双缓冲:
video_bmuf bmuf.frames = 2;
一帧被处理时可以采集另一帧
int frame; //当前采集的是哪一帧
int framestat[2]; //帧的状态 没开始采集|等待采集结束
帧的地址由vd->map + vd->mbuf.offsets[vd->frame]得到
采集工作结束后调用munmap取消绑定
munmap(vd->map, vd->mbuf.size)
2)视频截取的第二种方法:直接读设备
关于缓冲大小,图象等的属性须由使用者事先设置
int read (要访问的文件描述符;指向要读写的信息的指针;应该读写的字符数);
返回值为实际读写的字符数
实例:
int len ;
unsigned char *vd->map= (unsigned char *) malloc(vd->capability.maxwidth*vd->capability.maxheight );
len = read(vd->fd,vd->map, vd->capability.maxwidth*vd->capability.maxheight*3 );
3)用户指针
3. v4l2 设备操作说明
对设备的大多数操作都是应用层通过调用ioctl实现的,
不同的命令需要操作不同的文件设备节点,
具体的需要根据拓扑结构来决定操作那个字符设备。
以下是瑞芯微rk3568平台的摄像头拓扑图,移植了ov13850摄像头。
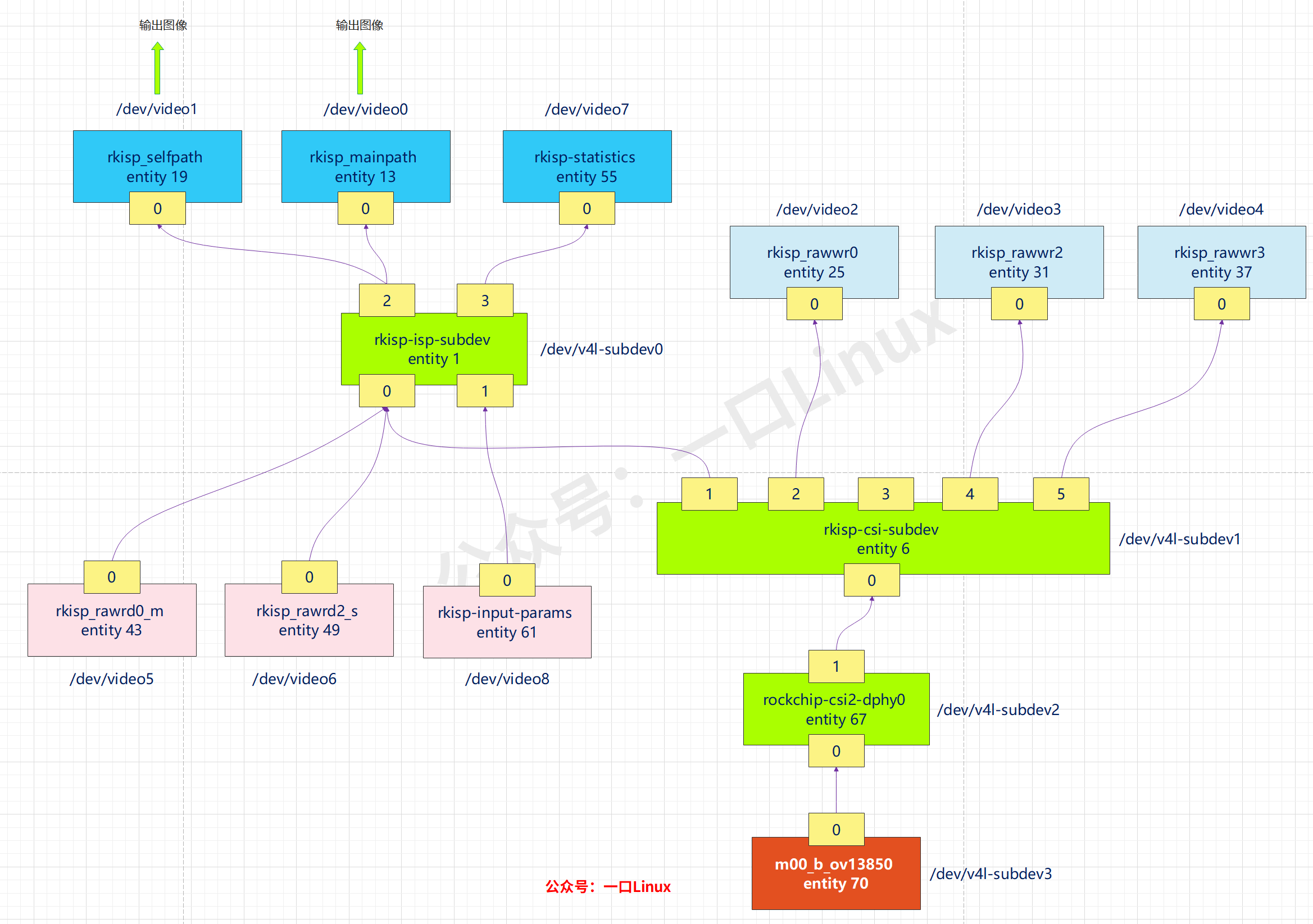
- 其中摄像头对应的此设备为: /dev/v4l-subdev3
- 应用层要配置通用配置、或者获取图像,需要操作设备 /dev/video0
- 有一些摄像头专用的命令,我们可以操作 /dev/v4l-subdev3
ov13850摄像头驱动中注册了一些命令对应的回调函数:

这些回调函数都注册到了V4L2架构中,我们可以通过字符设备 /dev/videox,、/dev/v4l-subdevx 直接或者间接访问到这些回调函数。
V4L2定义了一些通用的命令,操作字符设备 /dev/videox即可调用,命令具体定义如下:
kernel\drivers\media\v4l2-core\v4l2-ioctl.c
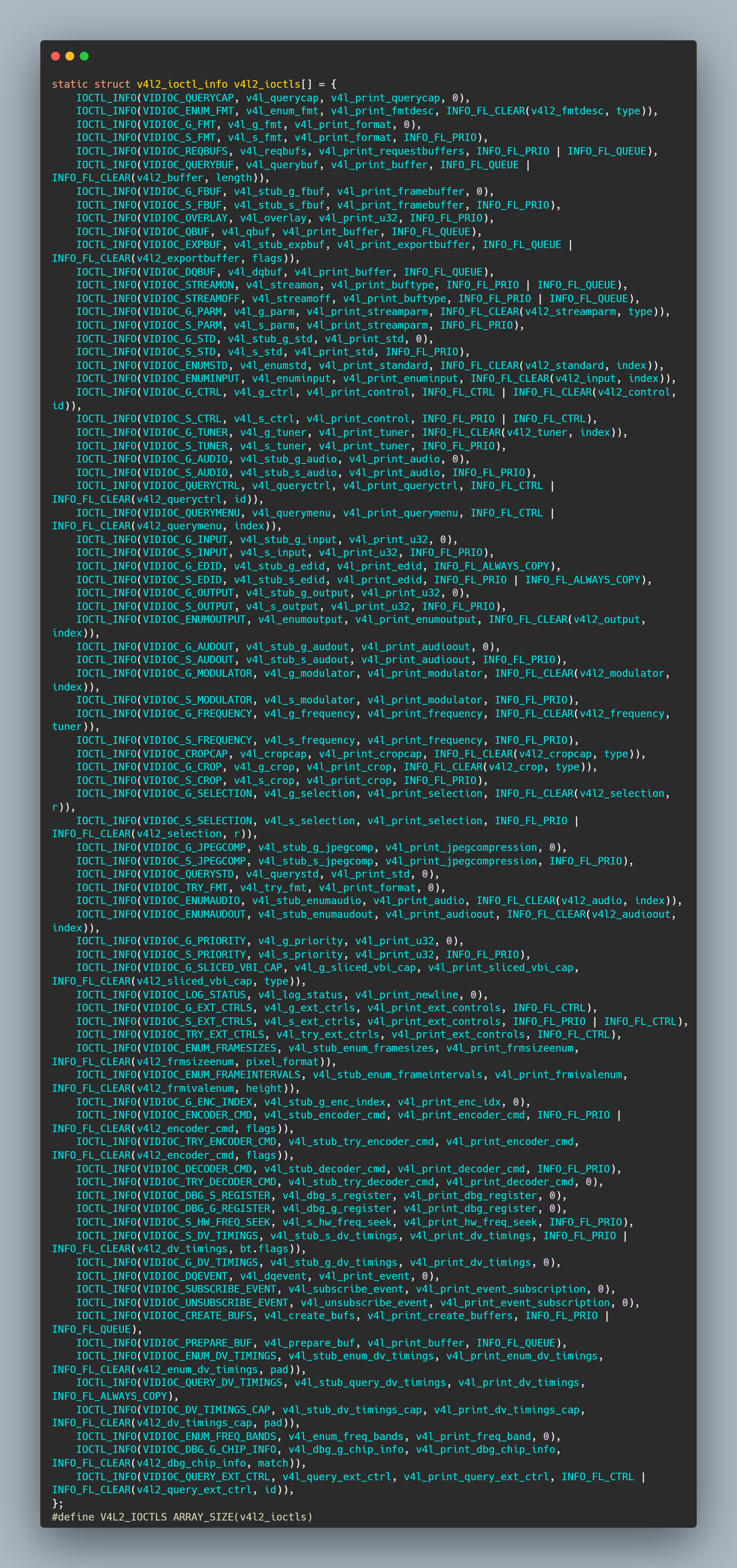
可以通过数组名+命令对应的数值方式访问对应的回调函数。
该数组定义如下:
struct v4l2_ioctl_info {
unsigned int ioctl;
u32 flags;
const char * const name;
int (*func)(const struct v4l2_ioctl_ops *ops, struct file *file,
void *fh, void *p);
void (*debug)(const void *arg, bool write_only);
};
字符设备/dev/v4l-subdevx支持的命令如下:
@kernel\drivers\media\v4l2-core\v4l2-subdev.c
static long subdev_do_ioctl(struct file *file, unsigned int cmd, void *arg)
{
……
switch (cmd) {
case VIDIOC_QUERYCTRL:
……
case VIDIOC_QUERY_EXT_CTRL:
……
case VIDIOC_QUERYMENU:
……
case VIDIOC_G_CTRL:
……
case VIDIOC_S_CTRL:
……
case VIDIOC_G_EXT_CTRLS:
……
case VIDIOC_S_EXT_CTRLS:
……
case VIDIOC_TRY_EXT_CTRLS:
……
case VIDIOC_DQEVENT:
……
case VIDIOC_SUBSCRIBE_EVENT:
return v4l2_subdev_call(sd, core, subscribe_event, vfh, arg);
case VIDIOC_UNSUBSCRIBE_EVENT:
return v4l2_subdev_call(sd, core, unsubscribe_event, vfh, arg);
#ifdef CONFIG_VIDEO_ADV_DEBUG
case VIDIOC_DBG_G_REGISTER:
……
case VIDIOC_DBG_S_REGISTER:
……
case VIDIOC_DBG_G_CHIP_INFO:
……
#endif
case VIDIOC_LOG_STATUS: {
……
#if defined(CONFIG_VIDEO_V4L2_SUBDEV_API)
case VIDIOC_SUBDEV_G_FMT: {
……
case VIDIOC_SUBDEV_S_FMT: {
……
case VIDIOC_SUBDEV_G_CROP: {
……
}
case VIDIOC_SUBDEV_S_CROP: {
……
}
case VIDIOC_SUBDEV_ENUM_MBUS_CODE: {
……
}
case VIDIOC_SUBDEV_ENUM_FRAME_SIZE: {
……
}
case VIDIOC_SUBDEV_G_FRAME_INTERVAL: {
……
}
case VIDIOC_SUBDEV_S_FRAME_INTERVAL: {
……
}
case VIDIOC_SUBDEV_ENUM_FRAME_INTERVAL: {
……
}
case VIDIOC_SUBDEV_G_SELECTION: {
……
}
case VIDIOC_SUBDEV_S_SELECTION: {
……
}
case VIDIOC_G_EDID: {
……
}
case VIDIOC_S_EDID: {
……
}
case VIDIOC_SUBDEV_DV_TIMINGS_CAP: {
……
}
case VIDIOC_SUBDEV_ENUM_DV_TIMINGS: {
……
}
case VIDIOC_SUBDEV_QUERY_DV_TIMINGS:
return v4l2_subdev_call(sd, video, query_dv_timings, arg);
case VIDIOC_SUBDEV_G_DV_TIMINGS:
return v4l2_subdev_call(sd, video, g_dv_timings, arg);
case VIDIOC_SUBDEV_S_DV_TIMINGS:
return v4l2_subdev_call(sd, video, s_dv_timings, arg);
case VIDIOC_G_INPUT:
return v4l2_subdev_call(sd, video, g_input_status, arg);
case VIDIOC_SUBDEV_G_STD:
return v4l2_subdev_call(sd, video, g_std, arg);
case VIDIOC_SUBDEV_S_STD: {
v4l2_std_id *std = arg;
return v4l2_subdev_call(sd, video, s_std, *std);
}
case VIDIOC_SUBDEV_ENUMSTD: {
……
}
case VIDIOC_SUBDEV_QUERYSTD:
……
}
return 0;
}
这其中有一些命令是和字符设备 /dev/videox 的命令重复的,
比如:VIDIOC_S_CTRL,
VIDIOC_SUBDEV_ 开头的则是subdev私有的。
关于这些命令和回调函数,后续会再深入讲解,对于应用程序开发,
我们首先搞清楚设备的拓扑结构,然后需要知道我们要执行的命令功能以及对应的是哪一个设备节点即可。
4. ioctl命令说明
参见结构体见
/usr/include/linux/videodev2.h
1)Querying Capabilities
查询设备的功能
由于V4L2涵盖了各种各样的设备,因此并非API的所有方面都适用于所有类型的设备,在使用v4l2设备时,必须调用此API,获得设备支持的功能(capture、output、overlay…)
| ID | 描述 |
|---|---|
| VIDIOC_QUERYCAP | 查询设备功能 |
struct v4l2_capability
{
u8 driver[16]; // 驱动名字
u8 card[32]; // 设备名字
u8 bus_info[32]; // 设备在系统中的位置
u32 version; // 驱动版本号
u32 capabilities; // 设备支持的操作
u32 reserved[4]; // 保留字段
};
capabilities 常用值:
V4L2_CAP_VIDEO_CAPTURE // 是否支持图像获取
2)Application Priority
应用优先级
当多个应用程序共享设备时,可能需要为它们分配不同的优先级。视频录制应用程序可以例如阻止其他应用程序改变视频控制或切换当前的电视频道。
另一个目标是允许在后台工作的低优先级应用程序,这些应用程序可以被用户控制的应用程序抢占,并在以后自动重新获得对设备的控制
| ID | 描述 |
|---|---|
| VIDIOC_G_PRIORITY | 获取优先级 |
| VIDIOC_S_PRIORITY | 设置优先级 |
3)Device Inputs and Outputs
输入和输出设备
| ID | 描述 |
|---|---|
| VIDIOC_ENUMINPUT | 枚举视频输入设备 |
| VIDIOC_G_INPUT | 获取当前的视频输入设备 |
| VIDIOC_S_INPUT | 设置视频输入设备 |
| VIDIOC_ENUMOUTPUT | 枚举视频输出设备 |
| VIDIOC_G_OUTPUT | 获取当前视频输出设备 |
| VIDIOC_S_OUTPUT | 设置视频输出设备 |
| VIDIOC_ENUMAUDIO | 枚举音频输入设备 |
| VIDIOC_G_AUDIO | 获取当前音频输入设备 |
| VIDIOC_S_AUDIO | 设置音频输入设备 |
| VIDIOC_ENUMAUDOUT | 枚举音频输出设备 |
| VIDIOC_G_OUTPUT | 获取音频输出设备 |
| VIDIOC_S_AUDOUT | 设置音频输出设备 |
VIDIOC_G_INPUT 和 VIDIOC_S_INPUT 用来查询和选则当前的 input,一个 video 设备 节点可能对应多个视频源,比如 saf7113 可以最多支持四路 cvbs 输入,如果上层想在四 个cvbs视频输入间切换,那么就要调用 ioctl(fd, VIDIOC_S_INPUT, &input) 来切换。
VIDIOC_G_INPUT and VIDIOC_G_OUTPUT 返回当前的 video input和output的index.
struct v4l2_input {
__u32 index; /* Which input */
__u8 name[32]; /* Label */
__u32 type; /* Type of input */
__u32 audioset; /* Associated audios (bitfield) */
__u32 tuner; /* Associated tuner */
v4l2_std_id std;
__u32 status;
__u32 reserved[4];
};
我们可以通过VIDIOC_ENUMINPUT and VIDIOC_ENUMOUTPUT 分别列举一个input或者 output的信息,我们使用一个v4l2_input结构体来存放查询结果,这个结构体中有一个 index域用来指定你索要查询的是第几个input/ouput,如果你所查询的这个input是当前正 在使用的,那么在v4l2_input还会包含一些当前的状态信息,如果所 查询的input/output 不存在,那么回返回EINVAL错误,所以,我们通过循环查找,直到返回错误来遍历所有的 input/output. VIDIOC_G_INPUT and VIDIOC_G_OUTPUT 返回当前的video input和output 的index.
4) Video Standards
视频标准
| ID | 描述 |
|---|---|
| VIDIOC_ENUMSTD | 枚举设备支持的所有标准 |
| VIDIOC_G_STD | 获取当前正在使用的标准 |
| VIDIOC_S_STD | 设置视频标准 |
| VIDIOC_QUERYSTD | 有的设备支持自动侦测输入源的视频标准,此ioctl获取检测到的标准 |
typedef u64 v4l2_std_id;
struct v4l2_standard {
u32 index;
v4l2_std_id id;
u8 name[24];
struct v4l2_fract frameperiod; /* Frames, not fields */
u32 framelines;
u32 reserved[4];
};
当然世界上现在有多个视频标准,如NTSC和PAL,他们又细分为好多种,那么我们的设 备输入/输出究竟支持什么样的标准呢?我们的当前在使用的输入和输出正在使用的是哪 个标准呢?我们怎么设置我们的某个输入输出使用的标准呢?这都是有方法的。
查询我们的输入支持什么标准,首先就得找到当前的这个输入的index,然后查出它的 属性,在其属性里面可以得到该输入所支持的标准,将它所支持的各个标准与所有的标准 的信息进行比较,就可以获知所支持的各个标准的属性。一个输入所支持的标准应该是一 个集合,而这个集合是用bit与的方式用一个64位数字表示。因此我们所查到的是一个数字。
5) Camera Control Reference
控制属性
| ID | 描述 |
|---|---|
| VIDIOC_QUERYCTRL | 查询指定的control详细信息 |
| VIDIOC_QUERYMENU | 查询menu |
| VIDIOC_G_CTRL | 获取设备指定control的当前信息 |
| VIDIOC_S_CTRL | 设置设备指定的control |
6) Image Format
图像格式
图像由多种格式YUV和RGB还有压缩格式等等,其中每种格式又分有多种格式,比如RGB:RGB565、RGB888…
所以在使用设备时,需要对格式进行设置
| ID | 描述 |
|---|---|
| VIDIOC_ENUM_FMT | 枚举设备支持的图像格式 |
| VIDIOC_G_FMT | 获取当前设备的图像格式 |
| VIDIOC_S_FMT | 设置图像格式 |
| VIDIOC_TRY_FMT | 测试设备是否支持此格式 |
查询并显示所有支持的格式:VIDIOC_ENUM_FMT
struct v4l2_fmtdesc
{
u32 index; // 要查询的格式序号,应用程序设置
enum v4l2_buf_type type; // 帧类型,应用程序设置
u32 flags; // 是否为压缩格式
u8 description[32]; // 格式名称
u32 pixelformat; // 格式
u32 reserved[4]; // 保留
};
查看或设置当前格式: VIDIOC_G_FMT, VIDIOC_S_FMT
struct v4l2_format
{
enum v4l2_buf_type type; // 帧类型,应用程序设置
union fmt
{
struct v4l2_pix_format pix; // 视频设备使用
struct v4l2_window win;
struct v4l2_vbi_format vbi;
struct v4l2_sliced_vbi_format sliced;
u8 raw_data[200];
};
};
struct v4l2_pix_format
{
u32 width; // 帧宽,单位像素
u32 height; // 帧高,单位像素
u32 pixelformat; // 帧格式
enum v4l2_field field;
u32 bytesperline;
u32 sizeimage;
enum v4l2_colorspace colorspace;
u32 priv;
};
7) Cropping, composing and scaling
图像裁剪、插入与缩放
| ID | 描述 |
|---|---|
| VIDIOC_CROPCAP | 获取图像裁剪缩放能力 |
| VIDIOC_G_CROP | 获取当前的裁剪矩阵 |
| VIDIOC_S_CROP | 设置裁剪矩阵 |
Cropping 和 scaling 主要指的是图像的取景范围及图片的比例缩放的支持。Crop 就 是把得到的数据作一定的裁剪和伸缩,裁剪可以只取样我们可以得到的图像大小的一部分, 剪裁的主要参数是位置、长度、宽度。而 scale 的设置是通过 VIDIOC_G_FMT 和 VIDIOC_S_FMT 来获得和设置当前的 image 的长度,宽度来实现的。
看下图:
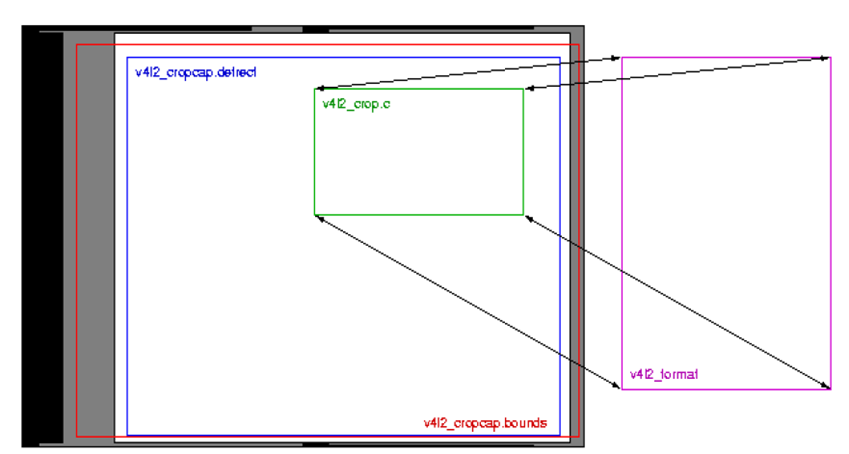
我们可以假设 bounds 是 sensor 最大能捕捉到的图像范围,而 defrect 是设备默认 的最大取样范围,这个可以通过 VIDIOC_CROPCAP 的 ioctl 来获得设备的 crap 相关的属 性 v4l2_cropcap,其中的 bounds 就是这个 bounds,其实就是上限。每个设备都有个默 认的取样范围,就是 defrect,就是 default rect 的意思,它比 bounds 要小一些。这 个范围也是通过 VIDIOC_CROPCAP 的 ioctl 来获得的 v4l2_cropcap 结构中的 defrect 来表示的,我们可以通过 VIDIOC_G_CROP 和 VIDIOC_S_CROP 来获取和设置设备当前的 crop 设置。
设置设备捕捉能力的参数
struct v4l2_cropcap
{
enum v4l2_buf_type type; // 数据流的类型,应用程序设置
struct v4l2_rect bounds; // 这是 camera 的镜头能捕捉到的窗口大小的局限
struct v4l2_rect defrect; // 定义默认窗口大小,包括起点位置及长,宽的大小,大小以像素为单位
struct v4l2_fract pixelaspect; // 定义了图片的宽高比
};
设置窗口取景参数 VIDIOC_G_CROP 和 VIDIOC_S_CROP
struct v4l2_crop
{
enum v4l2_buf_type type;// 应用程序设置
struct v4l2_rect c;
}
8) buf Input/Output
数据的输入和输出
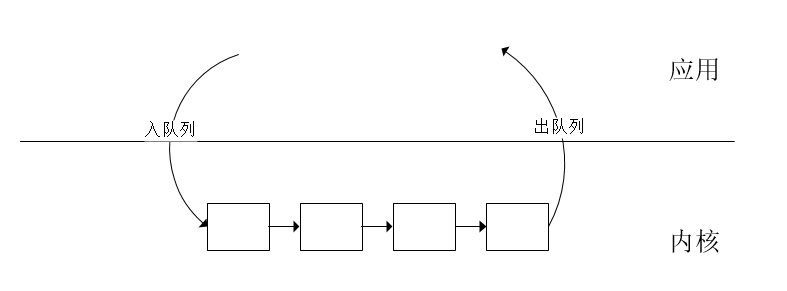
内核中使用缓存队列对图像数据进行管理,用户空间获取图像数据有两种方式,一种是通过read、write方式读取内核空间的缓存,一种是将内核空间的缓存映射到用户空间,即streaming。在操作v4l2设备时,通过VIDIOC_QUERYCAP获取设备支持哪种方式。
streaming就是在内核空间中维护一个缓存队列,然后将内存映射到用户空间,应用读取图像数据就是一个不断地出队列和入队列的过程,如下图所示
| ID | 描述 |
|---|---|
| VIDIOC_REQBUFS | 申请缓存 |
| VIDIOC_QUERYBUF | 获取缓存信息 |
| VIDIOC_QBUF | 将缓存放入队列中 |
| VIDIOC_DQBUF | 将缓存从队列中取出 |
1. 向设备申请缓冲区 VIDIOC_REQBUFS
struct v4l2_requestbuffers
{
u32 count; // 缓冲区内缓冲帧的数目
enum v4l2_buf_type type; // 缓冲帧数据格式
enum v4l2_memory memory; // 区别是内存映射还是用户指针方式
u32 reserved[2];
};
enum v4l2_memoy
{
V4L2_MEMORY_MMAP, V4L2_MEMORY_USERPTR
};
获取缓冲帧的地址,长度:VIDIOC_QUERYBUF
struct v4l2_buffer
{
u32 index; //buffer 序号
enum v4l2_buf_type type; //buffer 类型
u32 byteused; //buffer 中已使用的字节数
u32 flags; // 区分是MMAP 还是USERPTR
enum v4l2_field field;
struct timeval timestamp; // 获取第一个字节时的系统时间
struct v4l2_timecode timecode;
u32 sequence; // 队列中的序号
enum v4l2_memory memory; //IO 方式,被应用程序设置
union m
{
u32 offset; // 缓冲帧地址,只对MMAP 有效
unsigned long userptr;
};
u32 length; // 缓冲帧长度
u32 input;
u32 reserved;
};
2. 内存映射MMAP 及定义一个结构体来映射每个缓冲帧。
相关结构体:
struct buffer
{
void* start;
unsigned int length;
}*buffers;
相关函数:
#include <sys/mman.h>
void *mmap(void *addr, size_t length, int prot, int flags, int fd, off_t offset)
参数:
addr 映射起始地址,一般为NULL ,让内核自动选择
length 被映射内存块的长度
prot 标志映射后能否被读写,其值为PROT_EXEC,PROT_READ,PROT_WRITE, PROT_NONE
flags 确定此内存映射能否被其他进程共享,MAP_SHARED,MAP_PRIVATE
fd,offset, 确定被映射的内存地址 返回成功映射后的地址,不成功返回MAP_FAILED ((void*)-1)
3.将所有的缓存放入队列
struct v4l2_buffer v4l2_buffer;
for(i = 0; i < nr_bufs; i++)
{
memset(&v4l2_buffer, 0, sizeof(struct v4l2_buffer));
v4l2_buffer.index = i; //想要放入队列的缓存
v4l2_buffer.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
v4l2_buffer.memory = V4L2_MEMORY_MMAP;
ret = ioctl(fd, VIDIOC_QBUF, &v4l2_buffer);
if(ret < 0)
{
printf("Unable to queue buffer.\n");
return -1;
}
}
9)启动 或 停止数据流
VIDIOC_STREAMON, VIDIOC_STREAMOFF
type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
ioctl (fd, VIDIOC_STREAMON, &type);
5. v4l2设备抓帧程序编写
v4l2设备的命令比较多,其实常用的并不是很多,下面通过一个实例来详细讲解,如何操作v4l2设备。
1)设备配置
本例,将常用的摄像头配置参数等装成结构体:
struct v4l2_dev
{
int fd; //videoO对应的设备描述符
int sub_fd;
const char *path; //字符设备 /dev/videoO
const char *name; //摄像头名称
const char *subdev_path;//字符设备 /dev/v4l-subdev3
const char *out_type; //输出图像格式
enum v4l2_buf_type buf_type;//缓存类型
int format; //像素格式
int width; //图像宽度
int height; //图像高度
unsigned int req_count; //缓存数量
enum v4l2_memory memory_type; //读取图像的方法,DMA还是MMAP
struct buffer *buffers; //缓冲区
unsigned long int timestamp;//时长度
int data_len;//图像数据长度
unsigned char *out_data;//图像数据
};
本例填写的摄像头ov13850的配置信息如下:
struct v4l2_dev ov13850 = {
.fd = -1,
.sub_fd = -1,
.path = "/dev/video0",
.name = "ov13850",
.subdev_path = "/dev/v4l-subdev3",
.out_type = "nv12",
.buf_type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE,
.format = V4L2_PIX_FMT_NV12,
.width = 800,
.height = 600,
.req_count = 4,
.memory_type = V4L2_MEMORY_MMAP,
.buffers = NULL,
.timestamp = 0,
.data_len = 0,
.out_data = NULL,
};
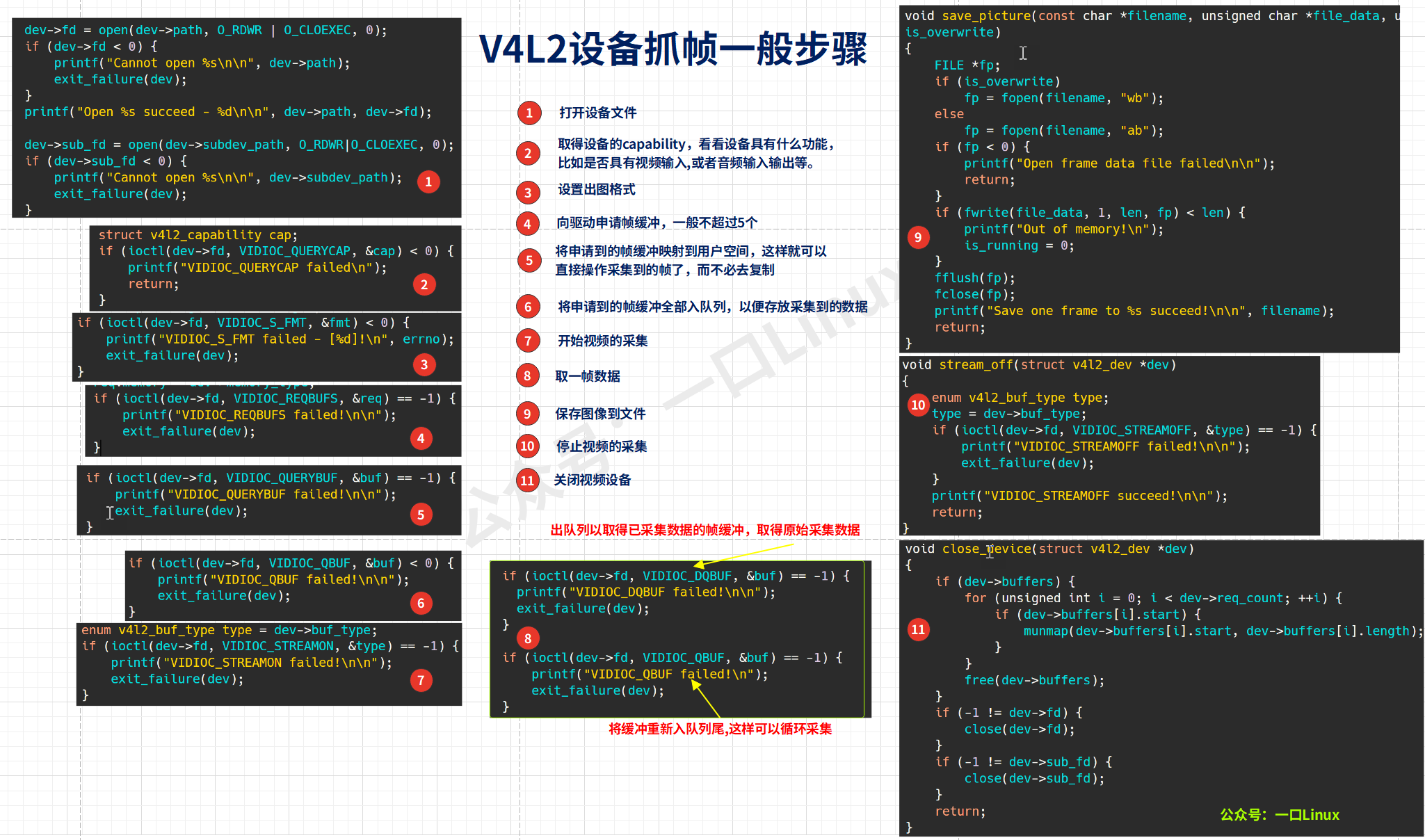
2)v4l2设备一般操作流程(抓帧)
v4l2设备一般操作流程如下图所示:
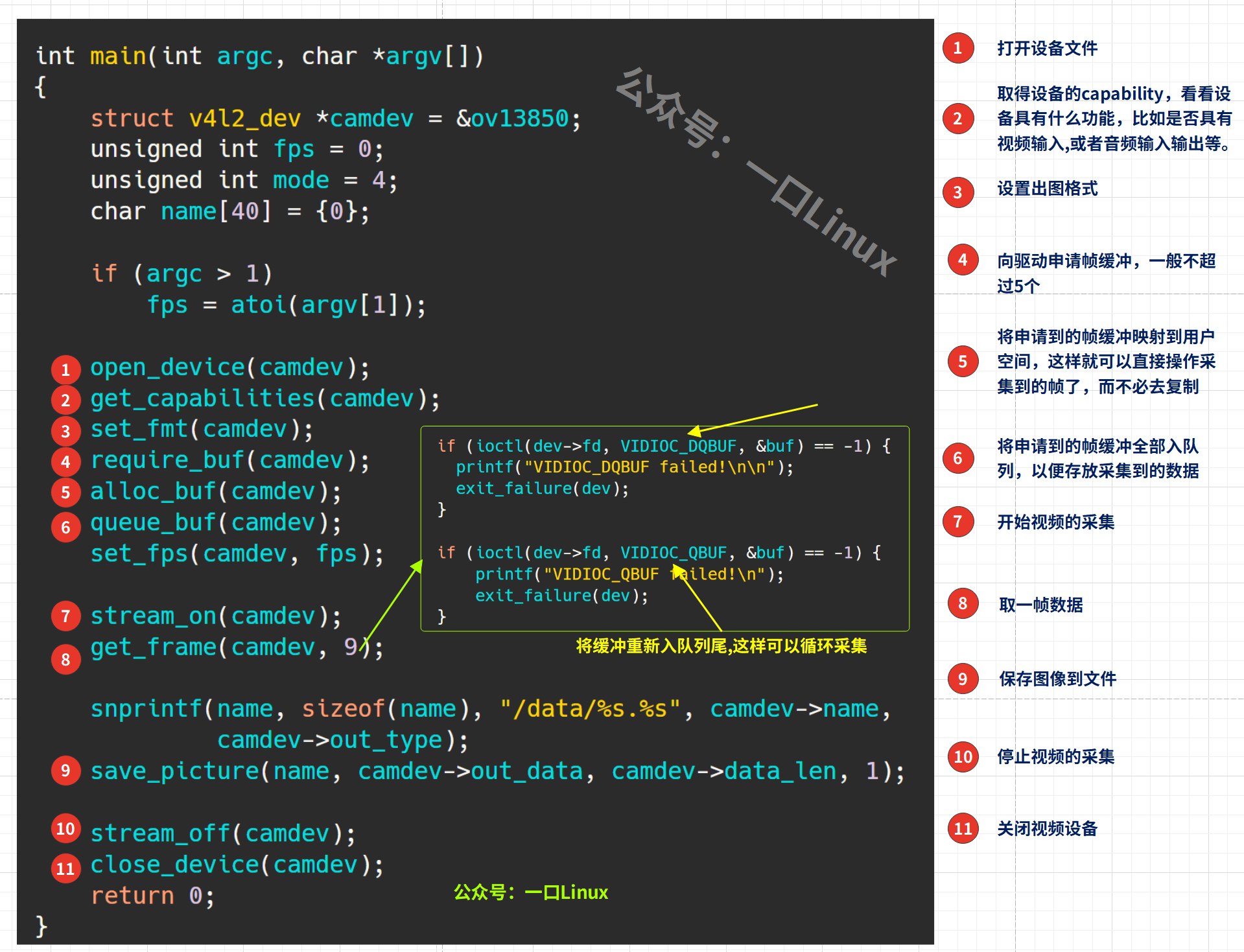
各功能对应的ioctrl命令如下:
测试程序一口君已经上传到gitee:
https://gitee.com/yikoulinux/v4l2-app
git clone git@gitee.com:yikoulinux/v4l2-app.git

欢迎各位老铁star。
3)程序执行log
以下是在瑞芯微rk3568实际测试的log。
rk3568_r:/ # /data/capture
/data/capture
Open /dev/video0 succeed - 3
Open /dev/v4l-subdev3 succeed
------- VIDIOC_QUERYCAP ----
driver: rkisp_v5
card: rkisp_mainpath
bus_info: platform:rkisp-vir0
version: 1.8.0
capabilities: 84201000
Video Capture Mplane
Streaming
VIDIOC_S_FMT succeed!
width 800, height 600, size 720000, bytesperline 0, format NV12
VIDIOC_REQBUFS succeed!
Memory map succeed!
VIDIOC_QBUF succeed!
VIDIOC_STREAMON succeed!
image: sequence = 0, timestamp = 1115378780
image: sequence = 1, timestamp = 1115511890
image: sequence = 2, timestamp = 1115645004
image: sequence = 3, timestamp = 1115778130
image: sequence = 4, timestamp = 1115911257
image: sequence = 5, timestamp = 1116044365
image: sequence = 6, timestamp = 1116177498
image: sequence = 7, timestamp = 1116310610
image: sequence = 8, timestamp = 1116443739
image: sequence = 9, timestamp = 1116576844
Save one frame to /data/ov13850.nv12 succeed!
VIDIOC_STREAMOFF succeed!
文中各种mipi技术文档,后台回复关键字:mipi
掌握了这些命令,我们就可以调试摄像头了。
后面还会继续更新几篇Camera文章,
建议大家订阅本专题!
也可以后台留言,加一口君好友yikoupeng,
拉你进高质量技术交流群。
Camera | 4.瑞芯微平台MIPI摄像头应用程序编写的更多相关文章
- 瑞芯微RK3399宣布系统开源,进入百余种行业市场!
集微网消息,2月24日瑞芯微官方突然宣布, Rockchip RK3399Linux系统开源!作为Rockchip旗舰级芯片,RK3399具有高性能.高扩展.全能型应用特性. 这一重磅消息立马刷爆朋友 ...
- Linux下更新瑞芯微固件
有这样的需求,是因为提供的BSP中是在windows下烧写的系统.我直接在linux下开发,每次编译后代码都要在windows下烧写,是一个很麻烦的事情.为了解决这个问题我尝试着用VirtualBox ...
- 9.7寸RK3188瑞芯微四核爱立顺M33平板电脑 - 深圳吉祥星晨科技有限公司 - 华强商情网
9.7寸RK3188瑞芯微四核爱立顺M33平板电脑 - 深圳吉祥星晨科技有限公司 - 华强商情网 欢迎加入 2000人超级QQ群,平板电脑行业交流群:221371451,平板电脑产品及报价群:5765 ...
- 瑞芯微发布最新旗舰应用处理器-RK3588
在瑞芯微电子第四届“开发者之春”大会上,瑞芯微推出了新一代8nm旗舰处理器-RK3588 这个芯片将采用8nm 制程工艺.基于A76+A55 内核组合,具备4K UI性能.8K VPU,拥有NPU2. ...
- 瑞芯微ROCK960 RK3399固件烧录总结
1 下载固件 进入瑞芯微ROCK960下载主页 https://www.96boards.org/documentation/consumer/rock/downloads/ 选择os固件, Debi ...
- 瑞芯微RK3399六核-迅为3399开发板介绍
迅为3399开发板基于瑞芯微的RK3399处理器设计,Rockchip RK3399是瑞芯微推出的一款低功耗.高性能的应用处理器芯片,该芯片基于Big.Little架构,即具有独立的NEON协同处理器 ...
- 瑞芯微RK3188如何配置USB摄像头支持
- 瑞芯微RK3188摄像头相关参数的配置
- 瑞芯微RKnanC芯片处理器介绍
RKnanC是一种低成本.低功耗.高效率的数字多媒体芯片,它是基于ARM的低功耗处理器结构和硬件加速器.它是专为便携式音频产品应用,如MP3播放器等. RKnanC可以支持各种音频标准的解码,如MP3 ...
- 瑞芯微ROCK960 RK3399烧录image后扩容rootfs
问题描述: RK3399开发板烧录官网提供的ubuntu镜像: Ubuntu 16.04 Server arm64(下载地址:https://www.96boards.org/documentatio ...
随机推荐
- Atcoder Beginner Contest 324 G Generate Arrays 题解-Treap
为了更好的阅读体验,请点击这里 题目链接 套上平衡树板子就能做的很快的题,然后因为是指针存树,因此交换只需要把序列大小较小的挨个拿出来插到相应的地方即可.复杂度 \(O(N \log^2 N)\). ...
- Linux设备模型:4、sysfs
作者:wowo 发布于:2014-3-14 18:31 分类:统一设备模型 http://www.wowotech.net/device_model/dm_sysfs.html 前言 sysfs是一个 ...
- ReST,以及RESTful的 简单介绍
什么是 ReST 阮一峰说的比较清楚,具体见他的博客文章. 二.名称 ReST这个词,是[Roy Thomas Fielding](http://en.wikipedia.org/wiki/Roy_F ...
- NXP i.MX 8M Plus工业核心板规格书(四核ARM Cortex-A53 + 单核ARM Cortex-M7,主频1.6GHz)
1 核心板简介 创龙科技SOM-TLIMX8MP是一款基于NXP i.MX 8M Plus的四核ARM Cortex-A53 + 单核ARM Cortex-M7异构多核处理器设计的高端工业核心板, ...
- mysql:Windows修改MySQL数据库密码(修改或忘记密码)
今天练习远程访问数据库时,为了方便访问,就想着把数据库密码改为统一的,以后我们也会经常遇到MySQL需要修改密码的情况,比如密码太简单.忘记密码等等.在这里我就借鉴其他人的方法总结几种修改MySQL密 ...
- C# WinForm遍历窗体控件的3种方法
1.循环遍历 private void GetControls(Control fatherControl) { Control.ControlCollection sonControls = fat ...
- 2023/4/15 SCRUM个人博客
1.我昨天的任务 获得了人脸识别作弊检测和绘制界面的分工,准备先从作弊检测入手 2.遇到了什么困难 对作弊检测的组件不熟悉,进展缓慢,需要进行对点的学习 3.我今天的任务 初步学习cython
- pytest数据驱动(最简单)
pytest数据驱动(最简单) 第一种:通过yaml文件获取数据(一维列表) data.yaml文件内容如下: - '软件测试'- '单元测试'- '自动化测试'- '性能测试'- '测试开发'- ' ...
- SSH Exporter:基于Prometheus的远程系统性能监控神器
SSH Exporter English | 中文 介绍 SSH Exporter 是一个基于 Prometheus 规范的监控工具,通过 SSH 协议远程收集目标服务器的系统性能数据,如 CPU 使 ...
- 5、Git之版本号
5.1.概述 每一次提交,Git 都会生成相关的版本号:每个版本号由 40 位 16 进制的数字组成. 这 40 位 16 进制的数字,是根据提交的内容,通过 SHA-1 算法计算出来的. 版本号具体 ...