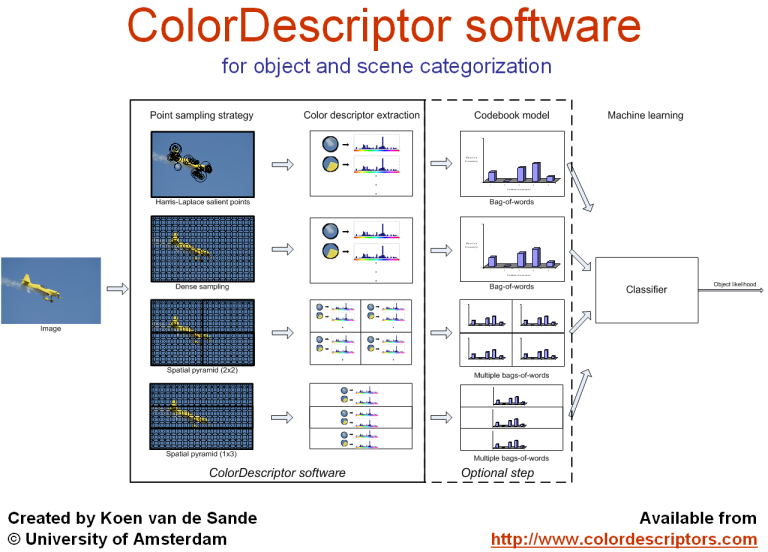
ColorDescriptor software v4.0 一个提取颜色特征描述子的软件包
ColorDescriptor software v4.0
Created by Koen van de Sande, (c) University of Amsterdam
Note: Any commercial use of this software requires a license.
For additional information, contact Koen van de Sande)
Introduction
This document contains the usage information of the color descriptor binary software. For a more high-level overview, you should start reading on the main color descriptor website.
Usage
Use the binary to compute color descriptors within an image, such as color histograms and color SIFT. The input image can be in PNG or JPG formats. The detector and descriptor options are documented below:
colorDescriptor <image> --detector <detector> --descriptor <descriptor> --output <descriptorfile.txt>
Note: the new --batchmode interprets arguments differently; see the documentation below.
License
Copyright (c) Koen van de Sande / University of Amsterdam This software is provided 'as-is', without any express or implied
warranty. In no event will the authors be held liable for any direct,
indirect, consequential, special, incidental, or other damages, including
but not limited to damages for lost profits, interruption of business,
lost or corrupted data or programs, system crashes, or diversion of system
or other resources, arising out of or relating to this license or the
performance, quality, results, use of, or inability to use this software. The authors shall not be liable for any claim asserted against you by any
other party, including but not limited to claims for infringement of copyright
or other intellectual property rights. Any commercial use of this software
requires a license from Euvision Technologies. This license must be retained with all copies of the software.
Citation
If you use this software, then please cite one the following two papers. The first is recommended for most users:
- Koen E. A. van de Sande, Theo Gevers and Cees G. M. Snoek, Empowering Visual Categorization with the GPU. IEEE Transactions on Multimedia volume 13 (1), pages 60-70, 2011. PDF version
- Koen E. A. van de Sande, Theo Gevers and Cees G. M. Snoek, Evaluating Color Descriptors for Object and Scene Recognition. IEEE Transactions on Pattern Analysis and Machine Intelligence volume 32 (9), pages 1582-1596, 2010. PDF version
BibTeX:
@Article{vandeSandeITM2011,
author = "van de Sande, K. E. A. and Gevers, T. and Snoek, C. G. M.",
title = "Empowering Visual Categorization with the GPU",
journal = "IEEE Transactions on Multimedia",
number = "1",
volume = "13",
pages = "60--70",
year = "2011",
url = "[url]http://www.science.uva.nl/research/publications/2011/vandeSandeITM2011[/url]"
}
@Article{vandeSandeTPAMI2010,
author = "van de Sande, K. E. A. and Gevers, T. and Snoek, C. G. M.",
title = "Evaluating Color Descriptors for Object and Scene Recognition",
journal = "IEEE Transactions on Pattern Analysis and Machine Intelligence",
volume = "32",
number = "9",
pages = "1582--1596",
year = "2010",
url = "[url]http://www.science.uva.nl/research/publications/2010/vandeSandeTPAMI2010[/url]"
}
Detectors
The detector option can be one of the following:
- --detector harrislaplace
- --detector densesampling
Harris-Laplace salient point detector
The Harris-Laplace salient point detector uses a Harris corner detector and subsequently the Laplacian for scale selection. See the paper corresponding to this software for references.
Additional options for the Harris-Laplace salient point detector:
--harrisThreshold threshold [default: 1e-9]
--harrisK k [default: 0.06]
--laplaceThreshold threshold [default: 0.03]
Dense sampling detector
The dense sampling samples at every 6th pixel in the image. For better coverage, a honeyrate structure is used: every odd row is offset by half of the sampling spacing (e.g. by 3 pixels by default). This reduces the overlap between points. By default, the dense sampling will automatically infer a single scale from the spacing parameter. However, you can also specify multiple scales to sample at, for example:
--detector densesampling --ds_spacing 10 --ds_scales 1.6+3.2
Additional options for the dense sampling detector:
--ds_spacing pixels [default: 6]
--ds_scales scale1+scale2+...
The default sampling scale for a spacing of 6 pixels is 1.2.
Descriptors
The following descriptors are available (the name to pass to --descriptoris shown in parentheses):
- RGB histogram (rgbhistogram)
- Opponent histogram (opponenthistogram)
- Hue histogram (huehistogram)
- rg histogram (nrghistogram)
- Transformed Color histogram (transformedcolorhistogram)
- Color moments (colormoments)
- Color moment invariants (colormomentinvariants)
- SIFT (sift)
- HueSIFT (huesift)
- HSV-SIFT (hsvsift)
- OpponentSIFT (opponentsift)
- rgSIFT (rgsift)
- C-SIFT (csift)
- RGB-SIFT(rgbsift), equal to transformed color SIFT (transformedcolorsift). See the journal paper for equivalence.
File format (text)
Files written using --output <filename>look as follows:
KOEN1
10
4
<CIRCLE 91 186 16.9706 0 0>; 28 45 4 0 0 0 9 14 10 119;
<CIRCLE 156 179 16.9706 0 0>; 7 82 80 62 23 2 15 6 21 23;
<CIRCLE 242 108 12 0 0>; 50 67 10 0 0 0 69 44 31 23 0 1;
<CIRCLE 277 105 14.2705 0 0>; 21 12 0 0 7 18 127 50 2 0 0;
The first line is used as a marker for the file format. The second line specifies the dimensionality of the point descriptor. The third line describes the number of points present in the file. Following this header, there is one line per point.
The per-point lines all consist of two parts: a description of the point (<CIRCLE x y scale orientation cornerness>) and a list of numbers, the descriptor vector. These two parts can be seperated through the semicolon ;. The xand ycoordinates start counting at 1, like Matlab.
By default, the program uses a Harris-Laplace scale-invariant point detector to obtain the scale-invariant points in an image (these are refered to as CIRCLE in the file format of the descriptors).
File format (binary)
Files written using --outputFormat binary --output <filename>are written to disk as a binary file in the "BINDESC1" format. The main advantage of using binary files is that they are much more efficient to parse in other software. The DescriptorIO.py file included in the distribution contains functions to parse the different file formats in Python. Besides Python, the script also depends on NumPy. For Matlab, the readBinaryDescriptors.m file can be used to read the files.
Visual Codebooks
The visual codebook model is widely used for object and scene categorization. In terms of processing speed, it is often faster to immediately construct a histogram of the descriptor occurence frequencies, instead of storing all descriptors to disk first and then performing this step separately. As of version 2.1, there are three fileformats for a codebook: the first one is the text-format documented above, where every line is a codebook vector. The <CIRCLE> part of the descriptor will not be used for the codebook, but it needs to be present for the file to be valid. The second format is the binary format discussed above, which allows for fast loading of the codebook (as text file formats are rather slow). The third option are old "binary" codebooks created with older versions of the software (this custom file format is no longer needed).
- Through the --codebook filenameoption, a file with the codebook vectors can be specified. All file formats are supported by this option
- For efficiency, it is recommended to use the --codebookoption with the binary file format, as it loads much faster (about 0.5s for the text version, versus <0.05s for the binary version).
When using the codebook mode of the software, a single output vector will be written to the output file. This vector has length equal to the codebook size. If the spatial pyramid (see below) is used as well, then one vector per pyramid element will be written.
Note: The Linux version of colorDescriptorhas been compiled with ATLAS, which allows for efficient codebook usage. The Windows/Mac versions have not been compiled with these faster routines, and is therefore significantly slower.
Soft Assignment
One inherent component of the codebook model is the assignment of discrete visual words to continuous image features. There is a clear mismatch of this hard assignment with the nature of continuous features. In the Visual Word Ambiguity paper by Van Gemert soft-assignment of visual words to image features is investigated. The Codeword Uncertainty (UNC) is included in the software and can be used by specifying --codebookMode unc. The sigma parameter for uncertainty can be specified using --codebookSigma 90.
Alternate codebook output mode
The default codebook mode (--codebookMode hard) writes a single output vector to the output file. However, sometimes it is useful to know which point goes where in the feature vector. The alternative codebook mode --codebookMode hardindexoutputs all the points and the index of the codebook element to which it would have been assigned.
Spatial Pyramids
Using the --pointSelectoroption, you can use a spatial pyramid like Lazebnik. Possible calls include:
- --pointSelector pyramid-1x1-2x2
- --pointSelector pyramid-1x1-2x2-1x3
These are shorthands for the real specification language for pyramids: they would look like P1x1#0+P2x2#0+P2x2#1+P2x2#2+P2x2#3and
P1x1#0+P2x2#0+P2x2#1+P2x2#2+P2x2#3+P1x3#0+P1x3#1+P1x3#2when written out in full. Using this specification language, you can define your own custom pyramids.
Batch mode
If you specify the option --batch, then the image filename argument will be interpreted as the name of a textfile. This textfile should contain a list of images. The --outputoption is now interpreted to be an output folder. In batch mode, you can efficiently process many images in a single run of the software. Especially for the GPU (CUDA) version, where the initialization cost of the GPU is high (about 1 second) this is important to obtain a speedup.
Additional options
The following options are also available:
- --loadRegions filenameAllows loading of custom regions (e.g. your own detector) instead of using a built-in detector. The file should be in BINDESC1 or KOEN1-format, and the descriptors can be left out (making a typical line look like this: <CIRCLE 91 186 16.9706 0 0>;;).
- --saveRegions filenameAllows saving of just the regions, without any descriptors.
- --keepLimited nWrite a random subset of at most ndescriptors to disk, instead of all descriptors for an image.
Frequently Asked Questions
Error: Cannot find file
When the software complains that it cannot find a file, try using a relative path (i.e. a path that does not start with /) instead of an absolute path. Another solution is to only use files which are in the current folder.
What is the interpretation of scale?
The scale parameter was implemented to correspond with the Gaussian filter sigma at which points were detected. Therefore, the scale is not directly interpretable as the size of the region described in terms of number of pixels. However, it is linearly related the radius of the circular area described. To capture the area of the Gaussian originally used, we have a 3x magnification factor. But, remember that SIFT has 4x4 cells, and this is a measure for a single cell. So, because we are working with a radius, multiply by 2. Due to the square shape of the region, we need to extend the outer radius even further by sqrt(2), otherwise the corners of the outer cells are cut off by our circle. So, the largest outer radius is Round(scale * 3 * 2 * sqrt(2)). The area from which the SIFT descriptor is computed is a square which fits within a circle of this radius. Also, due to the Gaussian weighting applied within SIFT, the area that really matters is much, much smaller: the outer parts get a low weight.
For the default scale of 1.2, we get a outer circle radius of 10. The potential sampling area then becomes -10..10, e.g. a 21x21patch. However, the square area which fits inside this circle is smaller: about 15x15. The corners of this 15x15square touch the outer circle.
Are the descriptors normalized?
The SIFT-based descriptors are L2-normalized, and subsequently multiplied by 512 and rounded to an integer. To verify this, divide all elements of the descriptor by 512, and compute the L2 norm, which will be approximately 1. For color extensions of SIFT, each channel is normalized independently, hence the L2 norm of the whole descriptor will be 3. The histogram-based descriptors are L1-normalized.
Floating Point Exception
When launching the executable, it immediately exits with a floating point exception. One possible cause is a lack of certain SSE instructions in your CPU. However, that should only happen on some CPUs from 2005 or earlier. Also, this depends on how the executable is compiled. Currently (v2.1), the Linux 64-bit executable is provided in two versions: one that only requires SSE and SSE2, the other version also uses more recent SSE versions.
Error: version GLIBCXX_3.4.9 not found
The 32-bit Linux version is compiled on Debian 5. Your Linux distribution is too ancient for the binaries to work (the C++ runtimes are too old). The 64-bit Linux SSE2 version is much more forgiving.
Problems with high-resolution images
When you feed high-resolution images (e.g. photos directly from a digital camera with 3000x2000 pixels or similar) into the software, it can be very slow and/or run out of memory if you sample very dense. We resize our images to a resolution of at most (500,x) or (x,500) with x < 500 before processing them.
Why are the Windows/Mac versions so slow?
Applying the codebook uses the optimized ATLAS linear algebra routines on Linux. However, on Windows, we are unable to compile ATLAS using the Microsoft Visual C++ compiler. An alternative would be to use the Intel Math Kernel Library, and we would be happy to accept donations for its license cost.
Why is the direction (angle) field always 0?
Estimating the dominant orientation of a descriptor is useful in matching scenarios. However, in an object/scene categorization setting, the additional invariance reduces accuracy. Being able to discriminate between dominant directions of up and right is very useful here, and rotated down images are quite rare in an object categorization setting. Therefore, orientation estimation is disabled in the color descriptor software. The subsequent rotation of the descriptor to achieve rotation-invariance is still possible by supplying your own regions and angles for an image (through --loadRegions). However, by default, no such rotation is performed, since the default angle is 0.
Why do I get Not-a-Number in combination with soft codebook assignment
Be sure to specify the --codebookSigmaoption (e.g. set to 90), because the default value is 0 (which leads to a division by 0 and therefore to NaN).
Changelog
4.0 (2012-08-31)
- Improved speed in all versions. Therefore, the citation for the software has changed to the GPU journal paper.
- New: GPU-accelerated version (CUDA 4.2) for 64-bit Windows
- New: 64-bit Windows version, now with optimized Intel MKL, sponsored by Euvision technologies
- Mac version available again, sponsored by Euvision technologies
- Improved numerical stability for image areas with little texture
- Note: Any commercial use of this software requires a license
3.0 (2011-02-18)
- Added batch mode to process multiple images in a row
- Experimental GPU version (separate download, based on our GPU paper)
- Windows version now uses multiple threads
- Fixed example script for codebook construction when there are images with 0 descriptors
2.1 (2010-06-10)
- Greatly improved efficiency of I/O operations (reading/writing files)
- Improved efficiency of internal datastructures, reducing overhead on many operations (10-20%), improved speed of vector quantization (10-20%). Example time reduction: from 3.52s to 2.33s.
- The --codebookoption now reads files in any format, making the --codebookConvertoption redundant. It is recommended to use the BINDESC1 file format to store codebooks (e.g. the same format which you get from the --outputFormat binary)
- Fixed minor bug in the Harris-Laplace detector for the two smallest scales
- Provide an example script on how to build a codebook from a set of images
- For 64-bit Linux version: Provide additional executable with SSE/SSE2 support only, so they also work on older CPUs (v2.0 required SSE3/4 for certain platforms)
- BUGFIX: included readBinaryDescriptors.m example script no longer handles rows and columns incorrectly (e.g. it works now)
2.0 (2009-09-24)
- The citation for the software has changed to the journal version.
- Added RGB-SIFT descriptor.
- Added new binary file output mode --outputFormat binary. The binary file format is very efficient to write, and also very efficient to parse in other software.
- Added soft codebook assignment --codebookMode unc(UNC from the paper by Van Gemert et al). --codebookSigma 90controls the smoothing performed within the codebook.
- Changed the default scale for dense sampling to a better choice.
- Scale estimation in Harris-Laplace works better for small scales.
- Note: Storage format of binary codebooks (created using --codebookConvert) has changed; old files can still be read.
1.3 (2009-02-12)
- New codebook mode --codebookMode hardindexwhich outputs all the points and the index of the codebook element to which it would have been assigned. The normal --codebookMode hardwould only output the final feature vector, the new mode allows you to see which point goes where in the feature vector.
- Linux versions now use ATLAS for codebook projection, which is up to 5x faster.
1.2 (2008-12-15)
- Added transformedcolorhistogramto documentation (was already in the executable)
- Made huesiftautomatically use the parameters from the paper (instead of requiring additional command-line options)
1.1 (2008-11-20)
- Using the csiftdescriptor no longer crashes (memory was still used after it had been released, which gives a segmentation fault)
1.0 (2008-11-07)
- Initial release
The site and its contents are © 2008-2016 Koen van de Sande, except for the files (and other contents) that are © of the respective owners. This site is not affiliated with or endorsed by my employer. Any trademarks used on this site are hereby acknowledged. Should there be any problems with the site, please contact the webmaster.
ColorDescriptor software
See:
Koen E. A. van de Sande, Theo Gevers and Cees G. M. Snoek, Evaluating Color Descriptors for Object and Scene Recognition, IEEE Transactions on Pattern Analysis and Machine Intelligence, volume 32 (9), pages 1582-1596, 2010. [PDF] [BibTeX]
for an evaluation of color descriptors carried out using this software. The paper provides a structured overview of color invariant descriptors in the context of image category recognition. The distinctiveness of color descriptors is assessed experimentally using two benchmarks from the image domain (PASCAL VOC 2007) and the video domain (Mediamill Challenge).
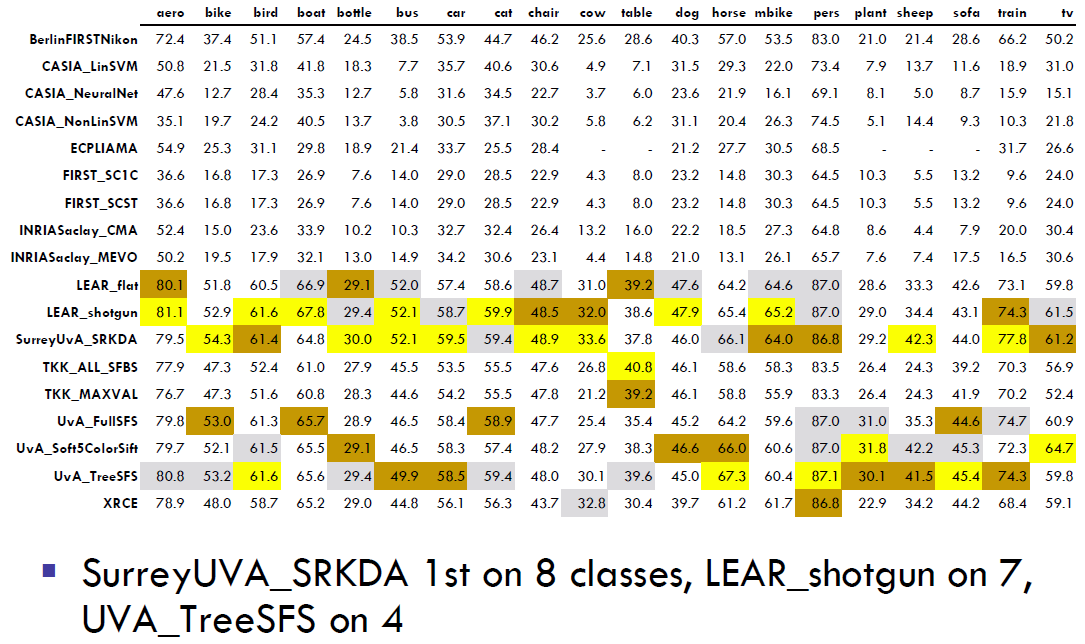
Besides our evaluation, these color descriptor have proven to be highly effective under many circumstances. See also our performance in the TRECVID 2008/2009 video retrieval benchmark, the ImageCLEF 2009 photo annotation task and our winning position (UvA submission = color descriptors + machine learning techniques) in the PASCAL VOC 2008 object classification competition. View our presentation at the PASCAL VOC 2008 workshop for additional information.
{kind=link}
Download
Koen E. A. van de Sande, Theo Gevers and Cees G. M. Snoek, Evaluating Color Descriptors for Object and Scene Recognition, IEEE Transactions on Pattern Analysis and Machine Intelligence, volume 32 (9), pages 1582-1596, 2010. [PDF] [BibTeX]
Koen E. A. van de Sande, Theo Gevers and Cees G. M. Snoek, Empowering Visual Categorization with the GPU, IEEE Transactions on Multimedia volume 13 (1), pages 60-70, 2011. [PDF] [BibTeX]
- Download the ColorDescriptor software
- Documentation
- License
- For additional information, contact Koen van de Sande (

 )
)
The download includes binaries for the following platforms:
- GPU-acclerated Windows (64-bit), with Nvidia CUDA acceleration
- Windows (32-bit)
- Windows (64-bit), with Intel MKL acceleration
- Linux (32-bit)
- Linux (64-bit)
- Mac OS X (10.7 Lion 64-bit)
Related work
- David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV 2004.
- Krystian Mikolajczyk and Cordelia Schmid, A Performance Evaluation of Local Descriptors, TPAMI 2005.
- Joost van de Weijer, Theo Gevers and Andrew Bagdanov, Boosting color saliency in image feature detection, TPAMI 2006.
- S. Lazebnik, C. Schmid and J. Ponce, Beyond bags of features: Spatial pyramid matching for recognizing natural scene categories, CVPR 2006.
- J. Zhang, M. Marszalek, S. Lazebnik, and C. Schmid, Local features and kernels for classification of texture and object categories: A comprehensive study, IJCV 2007.
- G. J. Burghouts and J.-M. Geusebroek. Performance evaluation of local colour invariants, CVIU 2008.
- J. C. van Gemert, C. J. Veenman, A. W. M. Smeulders, J.-M. Geusebroek. Visual Word Ambiguity, TPAMI 2010.
from: http://koen.me/research/colordescriptors/readme
http://koen.me/research/colordescriptors/
ColorDescriptor software v4.0 一个提取颜色特征描述子的软件包的更多相关文章
- 图像的特征工程:HOG特征描述子的介绍
介绍 在机器学习算法的世界里,特征工程是非常重要的.实际上,作为一名数据科学家,这是我最喜欢的方面之一!从现有特征中设计新特征并改进模型的性能,这就是我们进行最多实验的地方. 世界上一些顶级数据科学家 ...
- BRIEF 特征描述子
Binary Robust Independent Elementary Features www.cnblogs.com/ronny 1. BRIEF的基本原理 我们已经知道SIFT特征采用了128 ...
- SIFT算法:特征描述子
SIFT算法:DoG尺度空间生产 SIFT算法:KeyPoint找寻.定位与优化 SIFT算法:确定特征点方向 SIFT算法:特征描述子 目录: 1.确定描述子采样区域 2.生成描述子 2.1 旋 ...
- SIFT解析(三)生成特征描述子
以上两篇文章中检测在DOG空间中稳定的特征点,lowe已经提到这些特征点是比Harris角点等特征还要稳定的特征.下一步骤我们要考虑的就是如何去很好地描述这些DOG特征点. 下面好好说说如何来描述这些 ...
- Distinctive Image Features from Scale-Invariant Keypoints(SIFT) 基于尺度不变关键点的特征描述子——2004年
Abstract摘要本文提出了一种从图像中提取特征不变性的方法,该方法可用于在对象或场景的不同视图之间进行可靠的匹配(适用场景和任务).这些特征对图像的尺度和旋转不变性,并且在很大范围的仿射失真.3d ...
- 特征描述子(feature descriptor) —— HOG(方向梯度直方图)
HOG(Histogram of Oriented Gradients),描述的是图像的局部特征,其命名也暗示了其计算方法,先计算图像中某一区域不同方向上梯度的值,然后累积计算频次,得到直方图,该直方 ...
- 特征描述之LBP
LBP 在数字图像处理和模式识别领域,LBP指局部二值模式,英文全称:Local Binary Patterns.最初功能为辅助图像局部对比度,并不是一个完整的特征描述子. 后来提升为一种有效的纹理描 ...
- PCL点云特征描述与提取(1)
3D点云特征描述与提取是点云信息处理中最基础也是最关键的一部分,点云的识别.分割,重采样,配准曲面重建等处理大部分算法,都严重依赖特征描述与提取的结果.从尺度上来分,一般分为局部特征的描述和全局特征的 ...
- PCL点云特征描述与提取(4)
如何从一个深度图像(range image)中提取NARF特征 代码解析narf_feature_extraction.cpp #include <iostream> #include & ...
随机推荐
- JS中的apply,call,bind深入理解
在Javascript中,Function是一种对象.Function对象中的this指向决定于函数被调用的方式.使用apply,call 与 bind 均可以改变函数对象中this的指向,在说区别之 ...
- foxmail收发gmail彻底失败
周一一上班,发现gmail无法收取邮件,刚开始以为网络不稳定,后来经过百度发现原因是 gmail邮箱也被屏蔽了. 虽然可以FQ,保证gmail邮箱暂时使用,但是不可否认,在当前的形势下, ...
- 【BZOJ】【1901】【Zju2112】 Dynamic Rankings
再填个坑. 动态维护区间第K大(带单点修改) 首先裸的区间第K大我们是用的[前缀和]思想,实现O(n)预处理,O(1)找树查询,那么如果是动态的呢?我们可以利用树状数组(BIT)的思想,进行O(log ...
- [geeksforgeeks] Bottom View of a Binary Tree
http://www.geeksforgeeks.org/bottom-view-binary-tree/ Bottom View of a Binary Tree Given a Binary Tr ...
- MYSQL导入导出.sql文件(转)
一.MYSQL的命令行模式的设置: 桌面->我的电脑->属性->环境变量->新建-> PATH=“:path\mysql\bin;”其中path为MYSQL的安装路径. ...
- UML标准图(转载)
在前面的章节中,我们已经讨论过的构建和其他必要的UML元素.现在,我们需要明白的地方使用这些元素. 元素都可以以不同的方式,使一个被称为图的完整的UML图片,如:组件.所以这是非常重要的,要了解不同的 ...
- Native App执行JS
iOS: - (void)webViewDidFinishLoad:(UIWebView *)webView{ //js方法名+参数 NSString* jsCode = [NSS ...
- 怎样把网站js文件合并成一个?几种方法可以实现
我们在建网站时经常会用js特效代码以使页面更美观,比如js幻灯片代码.js下拉菜单等,但是网页特效一多,如果js文件没有合并的话会降低网站的性能,这时我们就要考虑合并js文件了,ytkah总结了以下几 ...
- c#中的线程一
一.使用线程的理由 1.可以使用线程将代码同其他代码隔离,提高应用程序的可靠性. 2.可以使用线程来简化编码. 3.可以使用线程来实现并发执行 二.基本知识 1.进程与线程:进程作为操作系统执行程序的 ...
- win7修改hosts文件方法
因权限的关系,导致无法修改,解决如下: hosts属性 --> 安全 --> 编辑权限 --> 完全控制,就可以修改该文件了.win7默认不能修改hosts文件.