python-GUI键盘小工具
一、tkinter GUI界面
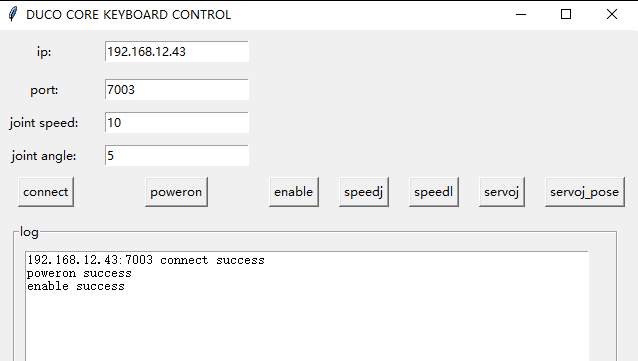
二、实现功能
连接设备、设备上电、设备使能、键盘按键控制关节移动、配置关节移动速度和角度
三、python源码
1 #coding=utf-8
2 import msvcrt
3 import threading
4 from tkinter import *
5 from tkinter import ttk
6 import tkinter as tk
7 from DucoCobot import DucoCobot
8 import math
9
10 class Display():
11 def __init__(self):
12 self.root = tk.Tk()
13 self.root.title("DUCO CORE KEYBOARD CONTROL")
14 self.dic_key = {"q": 1, "a": -1, "w": 1, "s": -1, "e": 1, "d": -1,
15 "u": 1, "j": -1, "i": 1, "k": -1, "o": 1, "l": -1}
16
17 #第一行
18 self.ip_label = Label(self.root, text="ip: ")
19 self.ip_demo = StringVar(value="192.168.12.111")
20 self.ip_field = Entry(self.root, textvariable=self.ip_demo)
21 self.ip_label.grid(row=0, column=0, padx=10, pady=10)
22 self.ip_field.grid(row=0, column=1, padx=10, sticky=W)
23 self.ip = Entry.get(self.ip_field)
24 # 第二行
25 self.port_label = Label(self.root, text="port: ")
26 self.port_demo = StringVar(value="7003")
27 self.port_field = Entry(self.root, textvariable=self.port_demo)
28 self.port_label.grid(row=1, column=0, padx=10, pady=5)
29 self.port_field.grid(row=1, column=1, padx=10, sticky=W)
30 self.port = Entry.get(self.port_field)
31 #第三行
32 self.speed_label = Label(self.root, text="joint speed: ")
33 self.speed_demo = StringVar(value="10")
34 self.speed_field = Entry(self.root, textvariable=self.speed_demo)
35 self.speed_label.grid(row=2, column=0, padx=10, pady=5)
36 self.speed_field.grid(row=2, column=1, padx=10, sticky=W)
37
38 #第四行
39 self.angle_label = Label(self.root, text="joint angle: ")
40 self.angle_demo = StringVar(value="5")
41 self.angle_field = Entry(self.root, textvariable=self.angle_demo)
42 self.angle_label.grid(row=3, column=0, padx=10, pady=5)
43 self.angle_field.grid(row=3, column=1, padx=10, sticky=W)
44
45 # 第五行
46 self.button_connect = Button(self.root, text="connect", command=self.connect_robot)
47 self.button_connect.grid(row=4, column=0, padx=10, pady=5)
48 self.button_poweron = Button(self.root, text="poweron", command=self.poweron)
49 self.button_poweron.grid(row=4, column=1, padx=10)
50 self.button_enable = Button(self.root, text="enable", command=self.enable)
51 self.button_enable.grid(row=4, column=2, padx=10)
52 self.button_speedj = Button(self.root, text="speedj", command=lambda: self.thread_it(self.speedj))
53 self.button_speedj.grid(row=4, column=3, padx=10)
54 self.button_speedl = Button(self.root, text="speedl", command=lambda: self.thread_it(self.speedl))
55 self.button_speedl.grid(row=4, column=4 ,padx=10)
56 self.button_speedj = Button(self.root, text="servoj", command=lambda: self.thread_it(self.servoj))
57 self.button_speedj.grid(row=4, column=5, padx=10)
58 self.button_speedl = Button(self.root, text="servoj_pose", command=lambda: self.thread_it(self.servoj_pose))
59 self.button_speedl.grid(row=4, column=6, padx=10)
60 #文本框
61 self.app = ttk.Frame()
62 self.app.grid(row=5, columnspan=8)
63 self.fram1 = LabelFrame(self.app, text='log')
64 self.fram1.grid(row=5, pady=10, padx=10)
65 self.win_output = Text(self.fram1)
66 self.win_output.grid(row=5, sticky=E + W + N + S, pady=10, padx=10)
67 self.scrollbar = Scrollbar(self.fram1, orient="vertical", command=self.win_output.yview)
68 self.scrollbar.grid(row=5, column=8, sticky=E, rowspan=80)
69 self.scrollbar.config(command=self.win_output.yview)
70 self.win_output.config(yscrollcommand=self.scrollbar.set)
71
72 self.root.mainloop()
73
74 def get_ip_port_open(self):
75 self.ip = Entry.get(self.ip_field)
76 self.port = Entry.get(self.port_field)
77 self.duco_cobot = DucoCobot(self.ip, self.port)
78 self.duco_cobot.open()
79
80 def connect_robot(self):
81 self.ip = Entry.get(self.ip_field)
82 self.port = Entry.get(self.port_field)
83 self.duco_cobot = DucoCobot(self.ip, self.port)
84 if self.duco_cobot.open() == 0:
85 self.write("{}:{} connect success".format(self.ip, self.port))
86
87 def poweron(self):
88 self.get_ip_port_open()
89 self.duco_cobot.power_on(True)
90 state = self.duco_cobot.get_robot_state()
91 if state[0] == 5 or 6:
92 self.write("poweron success")
93 else:
94 self.write("poweron fault")
95 self.write("get_robot_state: {}".format(state))
96
97 def enable(self):
98 self.get_ip_port_open()
99 self.duco_cobot.enable(True)
100 state = self.duco_cobot.get_robot_state()
101 if state[0] == 6:
102 self.write("enable success")
103 else:
104 self.write("enable fault")
105 self.write("get_robot_state: {}".format(state))
106
107 def speedj(self):
108 self.get_ip_port_open()
109 self.write("please press key:")
110 self.win_output.bind("<KeyPress>", self.speedj_action)
111
112 def speedj_action(self, event):
113 try:
114 self.joints_list = [0, 0, 0, 0, 0, 0]
115 self.speed = Entry.get(self.speed_field)
116 self.input_key = event.char
117 self.write(" is pressed, speedj speed is {}".format(self.speed))
118 self.key_index = list(self.dic_key.keys()).index(self.input_key) // 2
119 self.joints_list[self.key_index] += self.dic_key[self.input_key] * float(self.speed)
120 self.duco_cobot.speedj(self.joints_list, 0.8, 500, False)
121 except ValueError:
122 self.write(
123 "press fault, please press correct key(QA=joint1, WS=joint2,ED=joint3,UJ=joint4,IK=joint5,OL=joint6)")
124
125 def speedl(self):
126 self.get_ip_port_open()
127 self.write("please press key:")
128 self.win_output.bind("<KeyPress>", self.speedl_action)
129
130 def speedl_action(self, event):
131 try:
132 self.joints_list = [0, 0, 0, 0, 0, 0]
133 self.speed = Entry.get(self.speed_field)
134 self.input_key = event.char
135 self.write(" is pressed, speedl speed is {}".format(self.speed))
136 self.key_index = list(self.dic_key.keys()).index(self.input_key) // 2
137 self.joints_list[self.key_index] += self.dic_key[self.input_key] * float(self.speed)
138 self.duco_cobot.speedl(self.joints_list, 0.2, 500, False)
139 except ValueError:
140 self.write(
141 "press fault, please press correct key(QA=X, WS=Y,ED=Z,UJ=RX,IK=RY,OL=RZ)")
142
143 def servoj(self):
144 self.get_ip_port_open()
145 self.write("please press key:")
146 self.win_output.bind("<KeyPress>", self.servoj_action)
147
148 def servoj_action(self, event):
149 try:
150 position = self.duco_cobot.get_actual_joints_position()
151 self.angle = Entry.get(self.angle_field)
152 self.input_key = event.char
153 self.write(" is pressed, servoj angle is {}".format(self.angle))
154 self.key_index = list(self.dic_key.keys()).index(self.input_key) // 2
155 position[self.key_index] += self.dic_key[self.input_key] * math.radians(float(self.angle))
156 self.duco_cobot.servoj(position, 0.2, 0.4, False, 200, 25)
157 except ValueError:
158 self.write(
159 "press fault, please press correct key(QA=joint1, WS=joint2,ED=joint3,UJ=joint4,IK=joint5,OL=joint6)")
160
161 def servoj_pose(self):
162 self.get_ip_port_open()
163 self.write("please press key:")
164 self.win_output.bind("<KeyPress>", self.servoj_pose_action)
165
166 def servoj_pose_action(self, event):
167 try:
168 tcp_position = self.duco_cobot.get_tcp_pose()
169 joints_position = self.duco_cobot.get_actual_joints_position()
170 self.angle = Entry.get(self.angle_field)
171 self.input_key = event.char
172 self.write(" is pressed, servoj_pose angle is {}".format(self.angle))
173 self.key_index = list(self.dic_key.keys()).index(self.input_key) // 2
174 if self.key_index > 2:
175 tcp_position[self.key_index] += self.dic_key[self.input_key] * math.radians(float(self.angle))
176 else:
177 tcp_position[self.key_index] += self.dic_key[self.input_key] * float(self.angle) / 1000
178 self.duco_cobot.servoj_pose(tcp_position, 0.2, 0.4, joints_position, '', '', False, 200, 25)
179 except ValueError:
180 self.write(
181 "press fault, please press correct key(QA=X, WS=Y,ED=Z,UJ=RX,IK=RY,OL=RZ)")
182
183
184 def thread_it(self, func):
185 t = threading.Thread(target=func)
186 t.setDaemon(True)
187 t.start()
188
189 def write(self, txt):
190 self.win_output.insert(END, str(txt+"\n"))
191
192 if __name__ == '__main__':
193 Display()
四、程序打包
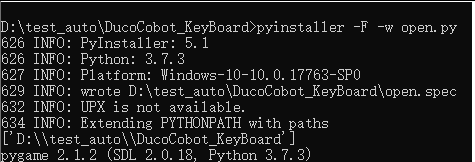
生成open.exe 文件,将其发送给未安装python的人,点击即可使用。
python-GUI键盘小工具的更多相关文章
- Python趣味实用小工具
代码地址如下:http://www.demodashi.com/demo/12918.html python 趣味实用小工具 概述 用python实现的三个趣味实用小工具: 图片转Execl工具 , ...
- Python+Tkinter 密保小工具
上图 代码 核心 编解码方面 Tkinter界面更新 总结 昨天被一同学告知,网上的一个QQ密码库中有我的一条记录,当时我就震惊了,赶紧换了密码.当然了,这件事也给了我一个警示,那就是定期的更换自己的 ...
- 几个可以提高工作效率的Python内置小工具
在这篇文章里,我们将会介绍4个Python解释器自身提供的小工具.这些小工具在笔者的日常工作中经常用到,减少了各种时间的浪费,然而,却很容易被大家忽略.每当有新来的同事看到我这么使用时,都忍不住感叹, ...
- python提效小工具-统计xmind用例数量
问题:做测试的朋友们经常会用到xmind这个工具来梳理测试点或写测试用例,但是xmind8没有自带的统计测试用例,其他版本的xmind有些自带节点数量统计功能,但也也不会累计最终的数量,导致统计测试工 ...
- python tkinter模块小工具界面
代码 #-*-coding:utf-8-*- import os from tkinter import * root=Tk() root.title('小工具') #清空文本框内容 def clea ...
- 纯Python综合图像处理小工具(3)10种滤镜算法
<背景> 滤镜处理是图像处理中一种非常常见的方法.比如photoshop中的滤镜效果,除了自带的滤镜,还扩展了很多第三方的滤镜效果插件,可以对图像做丰富多样的变换:很多手机app实现了实 ...
- 纯Python综合图像处理小工具(1)分通道直方图
平时工作经常需要做些图像分析,需要给图像分通道,计算各个通道的直方图分布特点,这个事儿photoshop也能做,但是用起来不方便,且需要电脑上安装有PS软件,如果用OpenCV, 更是需要在visua ...
- python: 实现sha1小工具
File1: sha1.py File2: sha1.bat ------------------ File1: sha1.py import hashlib import os,sys def Ca ...
- 纯Python综合图像处理小工具(4)自定义像素级处理(剪纸滤镜)
上一节介绍了python PIL库自带的10种滤镜处理,现成的库函数虽然用起来方便,但是对于图像处理的各种实际需求,还需要开发者开发自定义的滤镜算法.本文将给大家介绍如何使用PIL对图像进行自定义 ...
随机推荐
- Node.js的多版本管理工具 gnvm(win环境)的详细安装教程(图解步骤、通俗易懂、亲测有效)
前言 本篇随笔主要写了如何安装并使用node多版本管理工具gnvm(windowns环境下) 作为自己对多版本工具gnvm知识的总结与笔记. 百度云盘gnvm应用程序包 获取链接(个人应用地址如下): ...
- Django序列化组件与数据批量操作与简单使用Forms组件
目录 SweetAlert前端插件 Django自带的序列化组件 批量数据操作 分页器与推导流程 Forms组件之创建 Forms组件之数据校验 Forms组件之渲染标签 Forms组件之信息展示 S ...
- Pandas:添加修改、高级过滤
1.添加修改数据 Pandas 的数据修改是进行赋值,先把要修改的数据筛选出来,然后将同结构或者可解包的数据赋值给它: 修改数值 df.Q1 = [1, 3, 5, 7, 9] * 20 # 就会把值 ...
- Java 进阶路线图
前言 个人的从事Java开发行业已经也有一段时间,提升自己的Java水平,特整理下学习路线图,以备日后使用. 路线图资料收集 图片打不开,建议使用复制链接打开:或者私信告诉我. Java架构师学习路线 ...
- 【进阶】Spring中的注解与反射
[进阶]Spring中的注解与反射 目录 [进阶]Spring中的注解与反射 前言 一.内置(常用)注解 1.1@Overrode 1.2@RequestMapping 1.3@RequestBody ...
- 微前端(qiankun)主应用共享React组件
前言 最近需要重构一个老项目,定的方案用微前端去改造.主应用是老的项目,微应用是新的项目,由于重构时间比较紧张,子应用还需要使用父应用的一些组件.过程中遇到一些问题,记录一下. 方案 我们知道qian ...
- 前端ES6 特性兼容查询
ES6 http://kangax.github.io/compat-table/es6/ ES5 http://kangax.github.io/compat-table/es5/ ES 2016+ ...
- vivo 容器集群监控系统架构与实践
vivo 互联网服务器团队-YuanPeng 一.概述 从容器技术的推广以及 Kubernetes成为容器调度管理领域的事实标准开始,云原生的理念和技术架构体系逐渐在生产环境中得到了越来越广泛的应用实 ...
- Windows下MySQL的安装和删除
Windows下MySQL的安装和删除 安装Mysql 1 下载mysql 地址 2 安装教程 2.1配置环境变量 变量名:MYSQL_HOME 变量值:D:\software\programming ...
- spring中的bean生命周期
1.实例化(在堆空间中申请空间,对象的属性值一般是默认值.通过调用createBeanInstance()方法进行反射.先获取反射对对象class,然后获取默认无参构造器,创建对象) 2.初始化(就是 ...