ROS知识(6)----基于Eclipse开发
可以利用Eclipse集成开发环境进行ROS开发,从而提高研发效率。以色列巴尔伊兰大学的Mr. Roi Yehoshua开设了一门ROS课程,课程2( Lesson 2)讲解了如何利用Eclipse在ROS上进行开发。这里走下总结整理。安装步骤如下:
1. 安装Java8
我们采用Eclipse Neon版本的IDE,所以需要Java8的运行环境,下面为安装Java8的命令,如下所示:
sudo add-apt-repository ppa:webupd8team/java
sudo apt-get update
sudo apt-get install oracle-java8-installer
sudo apt-get install oracle-java8-set-default
2. 安装Eclipse Neon
- 确保Java虚拟机JVM已经安装,如果没有安装,在终端执行以下的命令:
$sudo apt-get install default-jre
- 下载Eclipse IDE for C/C++开发平台:
----下载地址:http://www.eclipse.org/downloads/
----最新的Eclipse Neon版本为:eclipse-cpp-neon-1a-linux-gtk-x86_64.tar.gz
- 解压Eclipse到你指定的文件夹中。
- 在终端中,将Eclipse移到系统的目录 /opt,执行如下命令:
$sudo mv eclipse /opt
- 创建一个链接,以给所有的用户可以使用,执行如下命令:
$sudo ln -s /opt/eclipse/eclipse /usr/bin/eclipse
- 为了方便,弄个Eclipse的快捷方式到桌面
$sudo gedit /usr/share/applications/eclipse.desktop
添加如下内容:
[Desktop Entry]
Name=Eclipse
Type=Application
Exec=bash -i -c "/opt/eclipse/eclipse"
Terminal=false
Icon=/opt/eclipse/icon.xpm
Comment=Integrated Development Environment
NoDisplay=false
Categories=Development;IDE
Name[en]=eclipse.desktop
–The bash –i - c command will cause your IDE's launcher icon to load your ROS-sourced shell environment before launching eclipse
3. 生成Eclipse项目文件
- 创建工作空间,执行如下代码:
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src
$ catkin_init_workspace
$ cd ~/catkin_ws
$ catkin_make
- 创建一个包first_pkg,执行如下代码:
$ cd ~/catkin_ws/src
$ catkin_create_pkg first_pkg std_msgs rospy roscpp
- 到catkin的工作空间,利用catkin_make命令,建立一个eclipse的项目,命令如下:
$ cd ~/catkin_ws
$ catkin_make --force-cmake -G"Eclipse CDT4 - Unix Makefiles"
- 项目的文件声称在目录 ~/catkin_ws/build里。
4. 导入项目
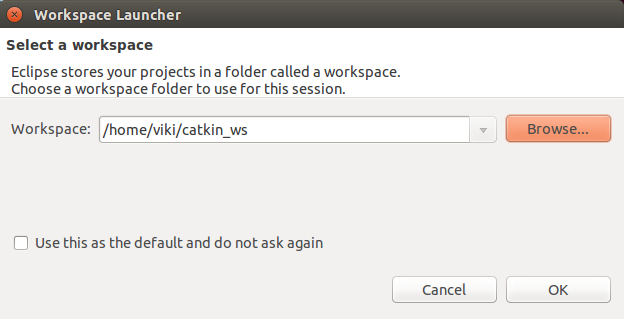
- 启动 Eclipse
- 选择catkin_ws 文件夹作为工作空间文件夹:
- 选择File --> Import --> General --> Existing Projects into Workspace

- 从文件夹~/catkin_ws/build中导入项目

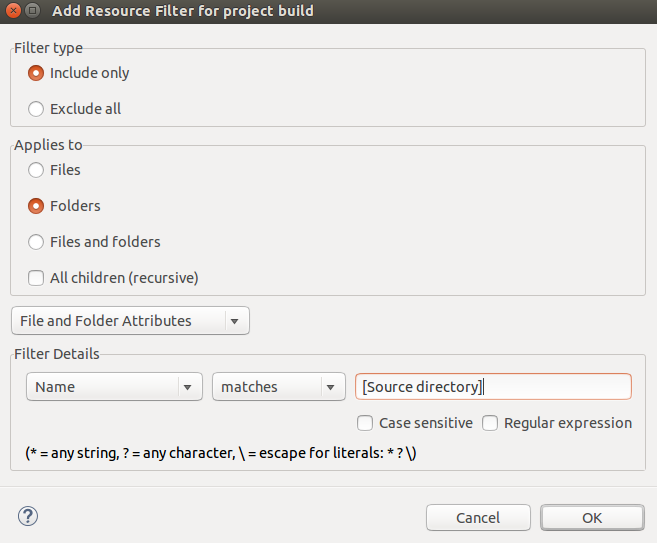
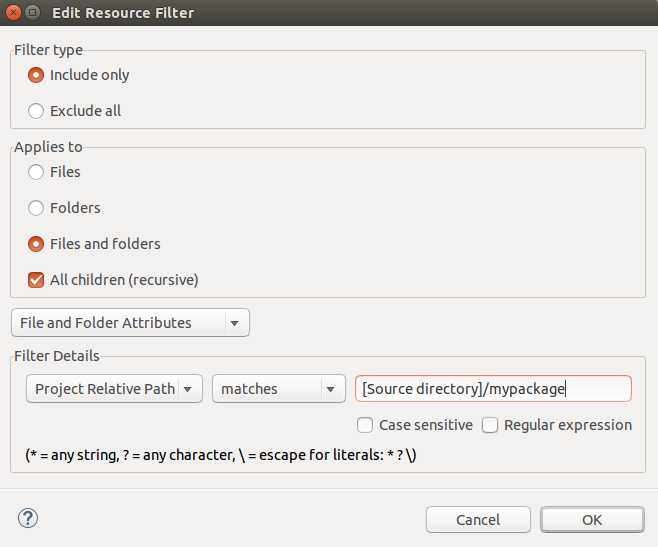
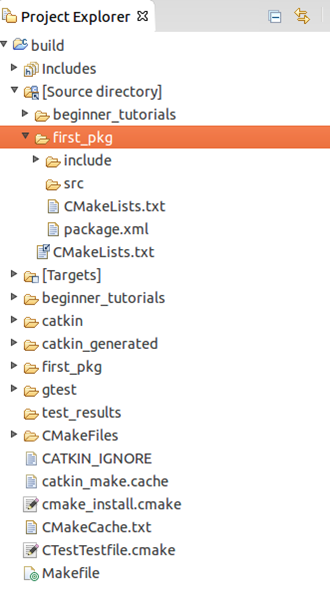
- 剔除没必要的目录。如果项目比较大,整个项目浏览器会比较的繁杂,为了让项目浏览更简洁,我们做些设置。右击项目build,选择Properties -> Resource,添加一个资源过滤器,如下图所示进行填写。然后选择ok,并应用即可。
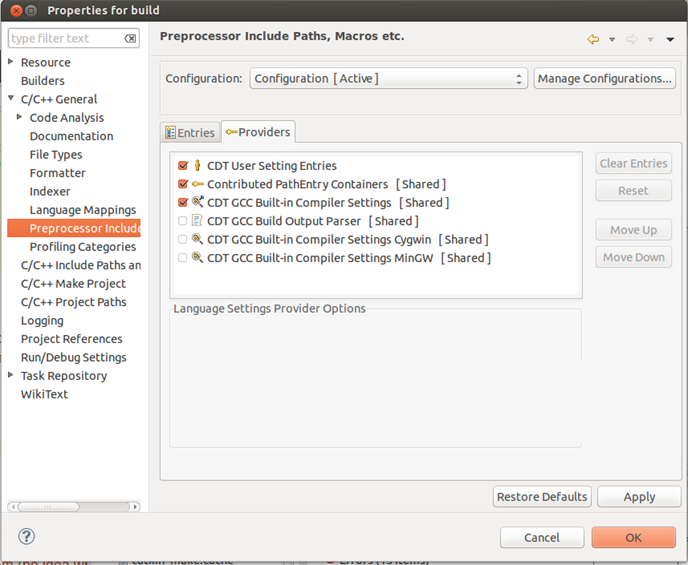
5. 添加预编译头文件的路径
- 默认情况下,Eclipse是不会只能识别到ROS的头文件信息的,为了修复它,作如下操作进行设置:
- 项目的源文件在文件夹 "Source directory"中,开发者可以在这个目录下添加源代码。
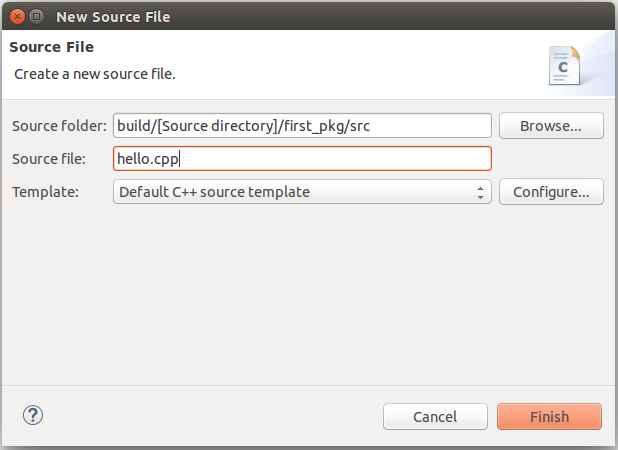
- 右击src,然后选择New –> Source File, 创建文件 hello.cpp,如下图所示:
#include "ros/ros.h"
int main(int argc, char **argv)
{
ros::init(argc, argv, "hello");
ros::NodeHandle nh;
ros::Rate loop_rate();
int count = ;
while (ros::ok()) // Keep spinning loop until user presses Ctrl+C
{
ROS_INFO_STREAM("hello world" << count);
ros::spinOnce(); // Allow ROS to process incoming messages
loop_rate.sleep(); // Sleep for the rest of the cycle
count++;
}
return ;
}
8. 编译节点
- 在编译前,需要在包的CMakeLists.txt文件中添加新的编译内容(红色部分),如下所示:
cmake_minimum_required(VERSION 2.8.)
project(first_pkg) ## Find catkin macros and libraries
find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs) ## Declare ROS messages and services
# add_message_files(FILES Message1.msg Message2.msg)
# add_service_files(FILES Service1.srv Service2.srv) ## Generate added messages and services
# generate_messages(DEPENDENCIES std_msgs) ## Declare catkin package
catkin_package() ## Specify additional locations of header files
include_directories(${catkin_INCLUDE_DIRS}) ## Declare a cpp executable
add_executable(hello src/hello.cpp) ## Specify libraries to link a library or executable target against
target_link_libraries(hello ${catkin_LIBRARIES})
- 按快捷键 Ctrl-B,编译项目
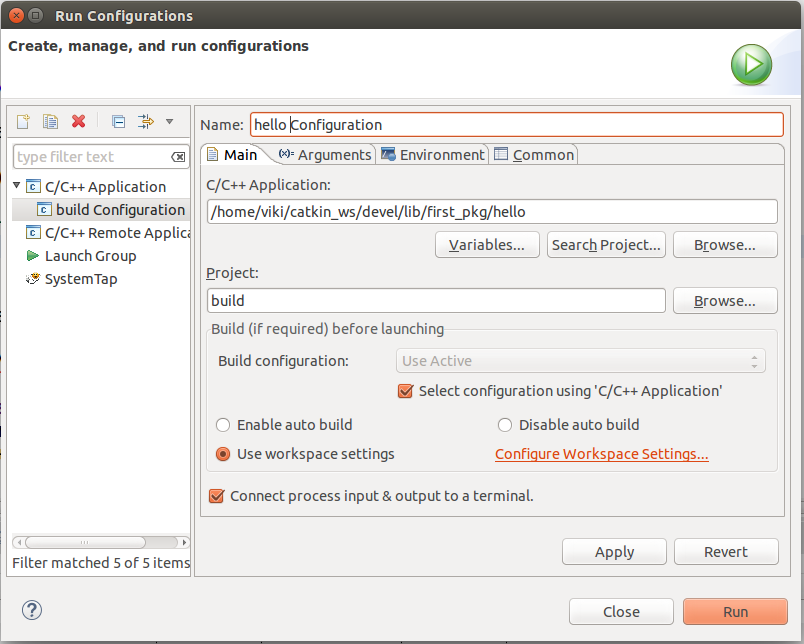
- 创建新的启动配置,点击 Run --> Run configurations... --> C/C++ Application (double click or click on New)。
- 选择相应的二进制执行程序 (use the Browse… button),如本例程的执行程序为:~/catkin_ws/devel/lib/first_pkg/hello。
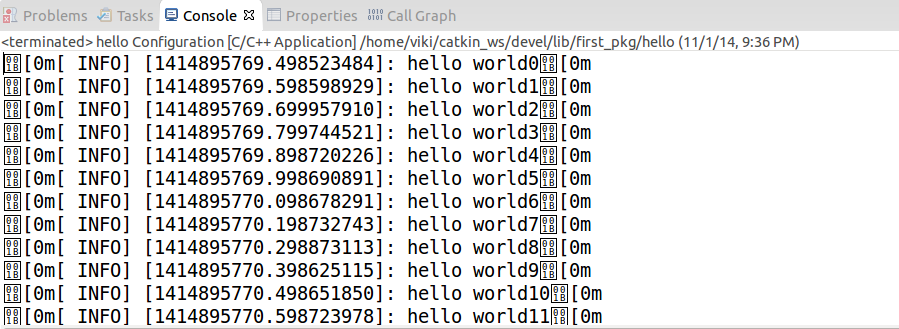
- 确保roscore已经在终端中运行。
- 点击Run,结果如下图所示:
- 为了调试,你需要将编译器设置为调试模式,终端中,到catkin_ws/build目录执行如下代码:
$ cmake ../src -DCMAKE_BUILD_TYPE=Debug
- 重启Eclipse
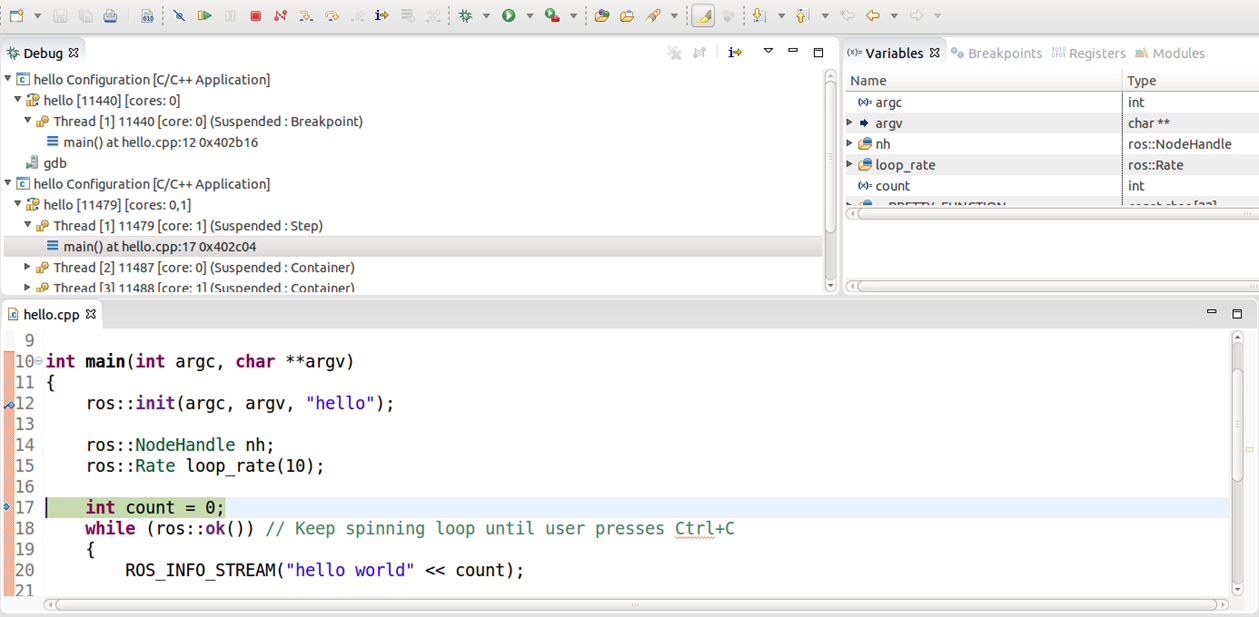
- 这样就可以利用Eclipse的调试工具进行调试了,进入调试界面,如下图所示:
ROS知识(6)----基于Eclipse开发的更多相关文章
- Hadoop伪分布配置与基于Eclipse开发环境搭建
国内私募机构九鼎控股打造APP,来就送 20元现金领取地址:http://jdb.jiudingcapital.com/phone.html内部邀请码:C8E245J (不写邀请码,没有现金送)国内私 ...
- 用Eclipse 开发Dynamic Web Project应用程序 【转】
简介:本文仅简单介绍基于Eclipse开发Dynamic Web Project应用下的JSP,Servlet及TOMCAT数据源的配置和开发. 软件环境: Eclipse Java EE IDE f ...
- java 中的Debug eclipse 开发工具使用
Eclipse的debug模式:代码调试 * Eclipse或MyEclipse就是java的开发工具 * Eclipse开源的.免费的Java开发工具 * MyEclipse基于Eclipse开发出 ...
- 转-用Eclipse 开发Dynamic Web Project应用程序
简介:本文仅简单介绍基于Eclipse开发Dynamic Web Project应用下的JSP,Servlet及TOMCAT数据源的配置和开发. 软件环境: Eclipse Java EE IDE f ...
- 基于Eclipse的Hadoop应用开发环境配置
基于Eclipse的Hadoop应用开发环境配置 我的开发环境: 操作系统ubuntu11.10 单机模式 Hadoop版本:hadoop-0.20.1 Eclipse版本:eclipse-java- ...
- 基于Eclipse搭建STM32开源开发环境
最近项目不忙,想着没事看看简单的嵌入式,弄弄物联网什么的.于是就从廉价的STM32开刀了.因为一直是做PC软件开发的,那VS的智能感知那叫一个爽啊,相比之下,觉得这个Keil简直就像文本编辑器一样lo ...
- 基于Eclipse的Go语言可视化开发环境
http://jingyan.baidu.com/article/d7130635032e2f13fdf475b8.html 基于Eclipse的Go语言可视化开发环境 | 浏览:2924 | 更新: ...
- JavaEE开发基于Eclipse的环境搭建以及Maven Web App的创建
本篇博客就完整的来聊一下如何在Eclipse中创建的Maven Project.本篇博客是JavaEE开发的开篇,也是基础.本篇博客的内容干货还是比较多的,而且比较实用,并且都是采用目前最新版本的工具 ...
- JavaEE开发之基于Eclipse的环境搭建以及Maven Web App的创建
本篇博客就完整的来聊一下如何在Eclipse中创建的Maven Project.本篇博客是JavaEE开发的开篇,也是基础.本篇博客的内容干货还是比较多的,而且比较实用,并且都是采用目前最新版本的工具 ...
随机推荐
- Django 自定义分页类
分页类代码: class Page(object): ''' 自定义分页类 可以实现Django ORM数据的的分页展示 输出HTML代码: 使用说明: from utils import mypag ...
- Python3 断言
#!/usr/bin/env python # _*_ coding:utf-8 _*_ # Author:CarsonLi ''' 断言一般用于后面有非常重要的操作,需要使用前面的数据,而且不容许出 ...
- Linux命令学习手册-route命令
route [-CFvnee] route [-v] [-A family] add [-net|-host] target [netmask Nm] [gw Gw] [metric N] [mss ...
- Deep Learning基础--SVD奇异值分解
矩阵奇异值的物理意义是什么?如何更好地理解奇异值分解?下面我们用图片的例子来扼要分析. 矩阵的奇异值是一个数学意义上的概念,一般是由奇异值分解(Singular Value Decomposition ...
- javaScript-继承2种方式
1.组合继承 组合继承带来的问题很明细就是父类的构造函数会调用两次,如: function Person(name, age, sex) { this.name = name; this.age = ...
- cordova 从xcode7迁移到xcode8
环境以开发流程 当前项目使用的cordova环境 cordova 6.1.1 cordova-ios 3.9.2(vs15自动装的不知道在哪能改,所以考虑升级到vs17,能够手动指定) cordova ...
- YAML中使用Jinja模板以{{ foo }}开头需要整行加双引号
YAML陷阱 YAML语法要求如果值以{{ foo }}开头的话我们需要将整行用双引号包起来.这是为了确认你不是想声明一个YAML字典.该知识点在 YAML 语法 页面有所讲述. 这样是不行的: - ...
- tcgetattr函数与tcsetattr函数控制终端
6.4.4 使用tcgetattr函数与tcsetattr函数控制终端 为了便于通过程序来获得和修改终端参数,Linux还提供了tcgetattr函数和tcsetattr函数.tcgetattr用于 ...
- CSS背景横向平铺BUG,解决方法
给定DIV一个背景图片横向平铺,缩小浏览器,拉动横向滚动条,此时触发此BUG:背景图片平铺不完整 解决办法: 1.把背景图片写在BODY上,此办法局限于没有使用iframe的情况下,所以少用 2.设定 ...
- java中Property类的基本用法
1 配置.properties文件 2 获取输入流的方法 1)FileInputStream fi = new FileInputStream(properties文件路径); 2)InputStre ...