opencv-python教程学习系列7-opencv图像基本操作
前言
opencv-python教程学习系列记录学习python-opencv过程的点滴,本文主要介绍图像的基本操作,坚持学习,共同进步。
系列教程参照OpenCV-Python中文教程;
系统环境
系统:win7_x64;
python版本:python3.5.2;
opencv版本:opencv3.3.1;
内容安排
1.知识点介绍;
2.测试代码;
具体内容
1.知识点介绍;
使用的库包含cv2、numpy和matplotlib,包含修改图像像素、获取图像属性、提取ROI、拆分合并通道、图像填充等内容;
1.1 获取并修改图像像素;
1)读取一副图像,根据像素的行和列的坐标获取它的像素值,返回RGB的值,灰度图则返回灰度值;图像中的坐标是从0开始计数的。
px=img[100,100]#某坐标对应的像素值
print(px)
blue = img[100,100,0]#数字0表示选择BGR通道
print(blue)
img[101,101]=[235,255,255]
print(img[101,101])
2)numpy是经过优化了的进行快速矩阵运算的包,不推荐逐个获取像素值并修改,能矩阵运算就不要用循环。
建议使用numpy的array.item()和array.itemset()函数。但是返回是标量,如果想获得所有RGB的值,需要使用array.item()分割他们。
#numpy
print(img[10, 10])
print(img.item(10,10,2))
img.itemset((10,10,2),100)
print(img.item(10,10,2))
1.2 获取图像属性,包括行、列、通道数目、图像数据类型、像素数目等;
image.shape - 获取图像的形状,返回值是一个包含行数/列数/通道数的元组,如果图像是灰度图,返回值仅有行数和列数,
可通过检查返回值可以判断是灰度图还是彩色图;
image.size - 获取图像的像素数目;
img.dtype - 图像的数据类型,在debug时很重要,因为OpenCV-Python代码中经常出现数据类型的不一致;
print(img.dtype)
1.3 图像ROI,对图像的特定区域操作。ROI是使用numpy索引来获得的。要先知道图像尺寸,以及要移动的图像的像素坐标,可以使用matplotlib!!
ball =img[300:350,230:300]
1.4 拆分及合并图像通道,cv2.split()是比较耗时的操作,能用numpy就尽量使用。
r,g,b=cv2.split(img)#拆分
img=cv2.merge([r,g,b])#合并
b=img[:,:,0]#拆分b通道
img[:,:,2]=0#使用numpy索引使所有红色通道值都为0
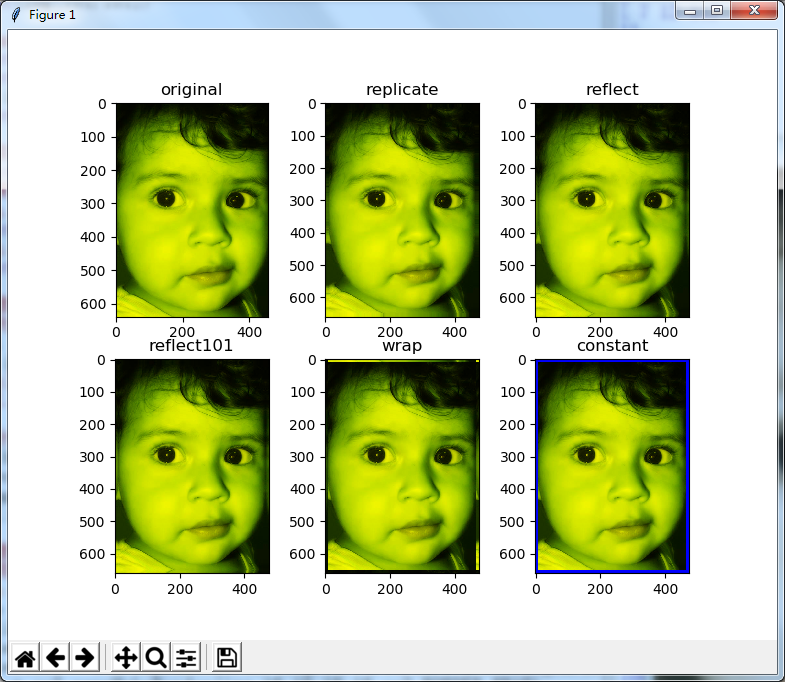
1.5 图像扩边(填充),使用cv2.copyMakeBorder()函数。这经常在卷积运算或0填充时被用到;
具体的参数有输入图像、上下左右对应边界的像素数目、边界类型;
cv2.BORDER_CONSTANT添加有颜色的常数值边界,还需要下一个参数(value);
cv2.BORDER_REFLIECT边界元素的镜像。例如:fedcba | abcdefgh | hgfedcb;
cv2.BORDER_101或者cv2.BORDER_DEFAULT跟上面一样,但稍作改动,例如:gfedcb | abcdefgh | gfedcba;
cv2.BORDER_REPLICATE复后一个元素。例如: aaaaaa| abcdefgh|hhhhhhh;
cv2.BORDER_WRAP 不知怎么了, 就像样: cdefgh| abcdefgh|abcdefg;
value边界颜色;
blue = [0,0,255]#分别表示RGB通道;
constant = cv2.copyMakeBorder(img,10,10,10,10,cv2.BORDER_CONSTANT,value=blue)
plt.subplot(236),plt.imshow(constant,'gray'),plt.title('constant')
2.测试代码;
import cv2
import numpy
img = cv2.imread('test.jpg')
px=img[100,100]#某坐标对应的像素值
print(px)
blue = img[100,100,0]#0表示BGR通道数
print(blue)
img[101,101]=[235,255,255]
print(img[101,101]) #numpy
print(img[10, 10])
print(img.item(10,10,2))
img.itemset((10,10,2),100)
print(img.item(10,10,2)) #获取图像属性(图像属性包括:行,列,通道,图像数据类型,像素数目等)
print(img.shape)#img.shape可以获得图像的形状,返回值是一个包含行数/列数/通道数的元组
#如果图像是灰度图,返回值仅有行数和列数,所以通过检查返回值可以判断是灰度图还是彩色图
#img.size可以返回图像的像素数目
print(img.size)
#img.dtype返回图像的数据类型,在debug时很重要,因为OpenCV-Python代码中经常出现数据类型的不一致
print(img.dtype) #图像ROI,对图像的特定区域操作。ROI是使用numpy索引来获得的。
#要先知道图像尺寸,以及你要移动的图像的像素坐标,可以使用matplotlib!!
ball =img[300:350,230:300]
cv2.imshow('image',img)#显示图像
img[500:550,300:370]=ball
cv2.imshow('imageROI',img)#显示图像 #拆分及合并图像通道,cv2.split()是比较耗时的操作,能用numpy就尽量使用。
r,g,b=cv2.split(img)#拆分
img=cv2.merge([r,g,b])#合并
b=img[:,:,0]#拆分b通道
img[:,:,2]=0#使用numpy索引使所有红色通道值都为0 #图像扩边(填充)
#使用cv2.copyMakeBorder()函数。这经常在卷积运算或0填充时被用到;
from matplotlib import pyplot as plt
blue = [0,0,255]#分别表示RGB通道;
replicate = cv2.copyMakeBorder(img,10,10,10,10,cv2.BORDER_REPLICATE)
reflect = cv2.copyMakeBorder(img,10,10,10,10,cv2.BORDER_REFLECT)
reflect101 = cv2.copyMakeBorder(img,10,10,10,10,cv2.BORDER_REFLECT101)
wrap = cv2.copyMakeBorder(img,10,10,10,10,cv2.BORDER_WRAP)
constant = cv2.copyMakeBorder(img,10,10,10,10,cv2.BORDER_CONSTANT,value=blue) plt.subplot(231),plt.imshow(img,'gray'),plt.title('original')
plt.subplot(232),plt.imshow(replicate,'gray'),plt.title('replicate')
plt.subplot(233),plt.imshow(reflect,'gray'),plt.title('reflect')
plt.subplot(234),plt.imshow(reflect101,'gray'),plt.title('reflect101')
plt.subplot(235),plt.imshow(wrap,'gray'),plt.title('wrap')
plt.subplot(236),plt.imshow(constant,'gray'),plt.title('constant') plt.show()
测试结果显示
参考
1. opencv图像基本操作;
完
opencv-python教程学习系列7-opencv图像基本操作的更多相关文章
- opencv-python教程学习系列8-opencv图像算术运算
前言 opencv-python教程学习系列记录学习python-opencv过程的点滴,本文主要介绍图像的算术运算,坚持学习,共同进步. 系列教程参照OpenCV-Python中文教程: 系统环境 ...
- opencv-python教程学习系列2-读取/显示/保存图像
前言 opencv-python教程学习系列记录学习python-opencv过程的点滴,本文主要介绍图像的读取.显示以及保存,坚持学习,共同进步. 系列教程参照OpenCV-Python中文教程: ...
- opencv ,亮度调整【【OpenCV入门教程之六】 创建Trackbar & 图像对比度、亮度值调整
http://blog.csdn.net/poem_qianmo/article/details/21479533 [OpenCV入门教程之六] 创建Trackbar & 图像对比度.亮度值调 ...
- 【OpenCV新手教程之十三】OpenCV图像金字塔:高斯金字塔、拉普拉斯金字塔与图片尺寸缩放
本系列文章由@浅墨_毛星云 出品,转载请注明出处. 文章链接:http://blog.csdn.net/poem_qianmo/article/details/26157633 作者:毛星云(浅墨) ...
- 《Python爬虫学习系列教程》学习笔记
http://cuiqingcai.com/1052.html 大家好哈,我呢最近在学习Python爬虫,感觉非常有意思,真的让生活可以方便很多.学习过程中我把一些学习的笔记总结下来,还记录了一些自己 ...
- [转]《Python爬虫学习系列教程》
<Python爬虫学习系列教程>学习笔记 http://cuiqingcai.com/1052.html 大家好哈,我呢最近在学习Python爬虫,感觉非常有意思,真的让生活可以方便很多. ...
- opencv-python教程学习系列13-图像平滑
前言 opencv-python教程学习系列记录学习python-opencv过程的点滴,本文主要介绍图像平滑,坚持学习,共同进步. 系列教程参照OpenCV-Python中文教程: 系统环境 系统: ...
- opencv-python教程学习系列12-图像阈值
前言 opencv-python教程学习系列记录学习python-opencv过程的点滴,本文主要介绍图像阈值/二值化,坚持学习,共同进步. 系列教程参照OpenCV-Python中文教程: 系统环境 ...
- opencv-python教程学习系列11-几何变换
前言 opencv-python教程学习系列记录学习python-opencv过程的点滴,本文主要介绍几何变换,坚持学习,共同进步. 系列教程参照OpenCV-Python中文教程: 系统环境 系统: ...
随机推荐
- Ubuntu16.04下的主题美化
1.先下载桌面外观管理工具 sudo apt-get install unity-tweak-tool 2.gnome工具 sudo apt-get install gnome-tweak-tool ...
- Codeforces 285C - Building Permutation
285C - Building Permutation 思路:贪心.因为每个数都不同且不超过n,而且长度也为n,所有排列只能为1 2 3 ......n.所以排好序后与对应元素的差值的绝对值加起来就是 ...
- WinForm一次只打开一个程序
WinForm如果我们希望一次只打开一个程序,那么我们在程序每次运行的时候都需要检测线程是否存在该程序,如果存在就呼出之前的窗体,C#代码如下: using System; using System. ...
- 记录一个错误,在bundle install时候出现 shoulda-mathcers bundle install fails with git error
复制粘体错误到google.找到解决方案: https://github.com/thoughtbot/shoulda-matchers/issues/1057 GIT remote: https:/ ...
- 卸载 PrestaShop 1.7
PrestaShop 的卸载非常简单: 在你的 Web 服务器上删除所有 PrestaShop 的文件和目录.你可以使用 FTP 客户端,你也可以使用 SSH 工具. 使用数据库工具删除数据库中所有以 ...
- Mac百度云盘不限速操作步骤
第一步:下载所需工具:(①②步我放在同一个文件夹,可一起下载,链接失效请留言) 工具地址:链接: https://pan.baidu.com/s/1raicYzM 密码: ve3n ①下载Aria2G ...
- UVA-1579 Matryoshka (区间DP)
题目大意:n个俄罗斯套娃,都有相应的编号,每次可将两个相邻的套娃组合成一组,每次合成只能小的放到大的里面,并且是逐层嵌套.问将这n个套娃分成若干个组,并且每组都是编号从1开始的连续序列,最少需要几步. ...
- UVA-818 Cutting Chains (位压缩+暴力搜索)
题目大意:一种环能打开和闭合.现在有n(1<=n<=15)个编号为1~n的环错综复杂的连接着,要打开一些环重新连接使这n个环能构成一条链,问最少需要打开几次环可达到目的? 题目分析:用二进 ...
- 项目构建工具gradle
1.安装 https://gradle.org/install 2.构建一个项目 https://guides.gradle.org/creating-new-gradle-builds/ 3.bui ...
- Eclipse 汉化方法
1 打开 http://www.eclipse.org/babel/downloads.php 2 复制 http://download.eclipse.org/technology/babel/u ...