Connect to a ROS Network---2
原创博文:转载请标明出处(周学伟):http://www.cnblogs.com/zxouxuewei/tag/
一.Introduction
ROS网络由单个ROS主机和多个ROS节点组成。 ROS主机通过跟踪所有活动的ROS节点来促进ROS网络中的通信。 每个节点需要向ROS主机注册,以便能够与网络的其他节点进行通信。 MATLAB可以启动ROS主机,或者主机可以在MATLAB外部启动(例如,在不同的计算机上)。 所有ROS节点向主机注册,并声明它们可以到达的网络地址。
使用ROS时,您通常会执行以下步骤:
1. 要连接到ROS网络,您可以在MATLAB中创建ROS主机或连接到现有的ROS主机。 在这两种情况下,MATLAB还将创建和注册自己的ROS节点(称为MATLAB“全局节点”)与主机。 rosinit函 数管理这个过程。
2.交换数据。 一旦连接,MATLAB通过发布者,订阅者和服务与其他ROS节点交换数据。
3.断开ROS网络。 调用rosshutdown函数断开MATLAB与ROS网络的连接。
1.在MATLAB中创建ROS主机。
2.连接到外部ROS主机。
二.Create a ROS Master in MATLAB
要在MATLAB中创建ROS主控,请调用rosinit而不使用任何参数。 这也将创建“全局节点”,MATLAB将使用它来与ROS网络中的其他节点通信。
rosinit

MATLAB外部的ROS节点现在可以加入ROS网络。 他们可以使用MATLAB主机的主机名或IP地址连接到MATLAB中的ROS主机。
您可以通过调用rosshutdown关闭ROS主节点和全局节点。
rosshutdown

三.Connect to an External ROS Master
您还可以使用rosinit命令连接到外部ROS主机(例如在机器人或虚拟机上运行)。 您可以通过两种方式指定主站的地址:由IP地址或运行主站的计算机的主机名。
每次调用rosinit后,在使用不同语法调用rosinit之前,必须调用rosshutdown。 为简洁起见,在以下部分中将省略对rosshutdown的这些调用。
首先在同网段的Ubuntu主机终端上运行如下:
1.查看IP地址
ifconfig

2.启动ros主机
roscore
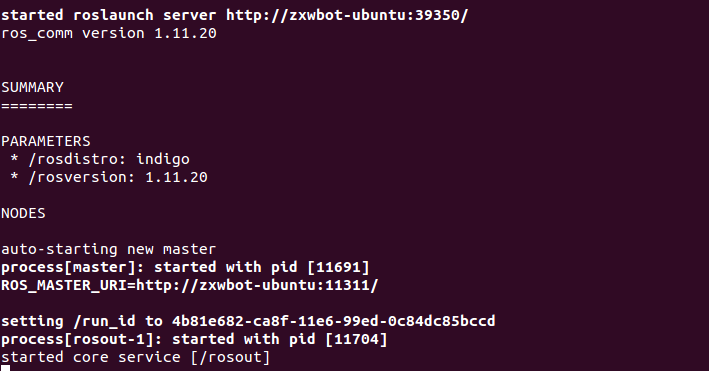
在本示例中,使用master_host作为示例主机名,并使用192.168.1.1作为外部ROS主机的IP地址示例。 根据外部主站在网络中的位置来调整这些地址。 请注意,如果在指定的地址中找不到主站,则以下命令将失败。
rosinit('192.168.1.171')
rosinit('zxwbot-ubuntu')

这两个调用rosinit假定主机将接受端口11311的网络连接,是标准的ROS主端口。
如果主机在不同的端口上运行,您可以将其指定为第二个参数。 要连接到在主机名master_host和端口12000上运行的ROS主机,请使用以下命令:
rosinit('zxwbot-ubuntu', )
rosinit('http://192.168.1.171:12000')
rosshutdown
rosinit('http://192.168.1.171:11311')

Node Host Specification
在某些情况下,您的计算机可能连接到多个网络,并有多个IP地址。 以下图为例。

左下角的计算机运行MATLAB并连接到两个不同的网络。在一个子网中,其IP地址为73.195.120.50,在另一个子网中,其IP为192.168.1.100。此计算机想要在IP地址为192.168.1.1的TurtleBot计算机上连接到ROS主机。作为向主机注册的一部分,MATLAB全局节点必须指定其他ROS节点可以访问的IP地址或主机名。 TurtleBot上的所有节点将使用此地址在MATLAB中将数据发送到全局节点。
当使用主机的IP地址调用rosinit时,它将尝试检测用于联系主机的网络接口,并将其用作全局节点的IP地址。
如果此自动检测失败,您可以使用rosinit调用中的NodeHost名称 - 值对显式指定IP地址或主机名。所有以前的调用rosinit的方法仍然允许添加NodeHost名称 - 值对。
对于以下命令,假设您要将计算机的IP地址作为192.168.1.100通告给ROS网络。
rosinit('192.168.1.1', 'NodeHost', '192.168.1.100')
rosinit('http://192.168.1.1:11311', 'NodeHost', '192.168.1.100')
rosinit('master_host', 'NodeHost', '192.168.1.100')

一旦节点在ROS网络中注册,您可以使用命令rosnode info NODE查看它通告的地址。 NODE是ROS网络中的节点的名称。 您可以通过调用rosnode列表来查看所有注册节点的名称。

ROS Environment Variables
在高级用例中,您可能需要通过标准ROS环境变量指定ROS主机的地址和您通告的节点地址。 在前面的部分中解释的调用语法应该足以满足大多数用例。
如果没有为rosinit提供参数,函数也将检查标准ROS环境变量的值。 这些变量是ROS_MASTER_URI,ROS_HOSTNAME和ROS_IP。 您可以使用getenv命令查看其当前值:
getenv('ROS_MASTER_URI')
getenv('ROS_HOSTNAME')
getenv('ROS_IP')
您可以使用setenv命令设置这些变量。 设置环境变量后,调用没有参数的rosinit。 ROS主机的地址由ROS_MASTER_URI指定,全局节点的通告地址由ROS_IP或ROS_HOSTNAME给定。 如果为rosinit指定其他参数,它们将覆盖环境变量中的值。
rosshutdown
setenv('ROS_MASTER_URI','http://192.168.1.1:11311')
setenv('ROS_IP','192.168.1.100')
rosinit

您不必同时设置ROS_HOSTNAME和ROS_IP。 如果两者都设置,ROS_HOSTNAME优先。
Verify Connection
要使ROS连接正常工作,必须确保所有节点都可以与主服务器和彼此进行通信。 各个节点必须与主机通信以注册订阅者,发布者和服务。 它们还必须能够彼此通信以发送和接收数据。
由于通信以这种方式工作,如果ROS网络未正确设置,则可能能够发送数据并且无法接收数据(反之亦然)。
这里是ROS网络中的通信结构的图。 有一个ROS主机和两个不同的节点向主机注册自己。 每个节点将联系主机以找到ROS网络中的另一个节点的通告地址。 一旦每个节点知道另一节点的地址,就可以建立数据交换而不涉及主机。

Connect to a ROS Network---2的更多相关文章
- 【记录】vmware fusion 7 windows 10 unidentified network
今天在 vmware fusion 7 中,使用 windows 10 时,突然报出一个错误(忘记截图了),当时就要求强制重启系统,也没怎么在意,但是重启之后,发现 windows 10 居然不能联网 ...
- Docker-2:network containers
docker run -d -P --name web training/webapp python app.py # -name means give the to-be-run container ...
- SNMP: Simple? Network Management Protocol(转)
转自:http://www.rane.com/note161.html An SNMP Overview The Message Format The Actual Bytes Introductio ...
- Network Load Balancing Technical Overview--reference
http://technet.microsoft.com/en-us/library/bb742455.aspx Abstract Network Load Balancing, a clusteri ...
- windows系统下安装和使用ROS的解决方案 (1 win_ros 2 rosserial_windows)
具体请参考官网: 1 http://wiki.ros.org/win_ros 2 https://github.com/ros-windows/win_ros 3 http://wiki.ros ...
- Get started with ros -- 1
原创博文:转载请标明出处(周学伟):http://www.cnblogs.com/zxouxuewei/tag/ 一.Introduction: 机器人操作系统(ROS)是使机器人系统的不同部分能够发 ...
- ROS教程
Learning ROS 学习ROS Depending on your learning style and preferences, you can take two approaches to ...
- Network Function Virtualization for a Network Device
An apparatus for performing network function virtualization (NFV), comprising: a memory, a processor ...
- ros:init()
ros::init()是ROS程序调用的第一个函数,用于对ROS程序的初始化. ros::init()函数的声明在ROS代码中的./src/ros_comm/roscpp/include/ros/in ...
随机推荐
- Android——黑名单管理(二)
说明:多加一点完善 1.在操作类 DAO 将连接数据库也放到了构造方法中(错误),加删除全部的方法 2.主界面增加了姓名一栏,用layout文件将对话框分离出来 3.删除加确认提示 4.加删除全部按钮 ...
- vba的一个File操作类
Option Explicit '-------------------------------------------------------- '[Class name]: clsTxtFile ...
- Extjs4.2 Tree使用技巧小结demo
本案例使用了Ext.Tree.Panel的如下知识点: 1.刷新.重新加载Tree,定位到上次的节点位置 2.Tree的右键操作 3.Extjs4.x Tree获取当前选中的节点 4.新增.修改.删除 ...
- 【linux】——一个小程序
利用工作之余为小伙伴写了份作业,关于进程间通信的.题目如下: 父进程从键盘上接受1000个数据,对其求和sum1,子进程对这1000个数平方和sum2,结果传给父进程,父进程将sum1+sum2后,打 ...
- kindle书摘-活着-余华-活着不易,珍惜
https://github.com/starrtc/android-demo 中文版自序 标注(黄色) - 位置 29 作家的使命不是发泄,不是控诉或者揭露,他应该向人们展示高尚.这里所说的高尚不 ...
- SVN和IntelliJ IDEA忽略node_module设置
SVN提交忽略node_modules 1.空白处右键>选中TortoiseSVN>设置(settings) 2.常规设置(General)>Subversion>编辑(edi ...
- Sword STL容器分类介绍
标准STL序列容器:vector.string.deque和list. 标准STL关联容器:set.multiset.map和multimap. 非标准序列容器slist和rope.slist是一个单 ...
- Windows IOT 开发入门(准备工作)
终于抽出空来了,将最近研究的东西记录下来,物联网,万物皆可联网.然后可以做到智能家居,智能生活,智能城市....一大堆.吹牛的就不说了. 在实际应用中都是一个个小的传感器在收集数据,同时把数据直接或者 ...
- SAP MM01 创建物料主数据 [关注公众号后回复MM01获取更多资料]
操作内容 物料主数据,适用于所有有物料编码物料相关信息的系统维护 业务流程 新项目设计冻结后—M公司 PD用-物料编码申请表D-BOM Material Number Application部门内部 ...
- (笔记)Linux下的解压、压缩命令集合
01-.tar格式解包:[*******]$ tar xvf FileName.tar打包:[*******]$ tar cvf FileName.tar DirName(注:tar是打包,不是压缩! ...