OpenCV笔记(1)(图片读取与现实、色彩空间、基础运算、均值方差、逻辑运算、泛洪填充、均值中值及自定义平滑)
一、图片读取和显示
import cv2 as cv # 图片读取cv.imread(img_path)
car_img = cv.imread("car1.png")
# 图片显示cv.imshow(window_name,img_mat)
cv.imshow('car1', car_img)
cv.waitKey(0)
# 图片写入cv.imwrite(save_path,img_mat)
cv.imwrite('car1_bk.jpg',car_img)
二、色彩空间转换
__author__ = 'Leo.Z' import cv2 as cv # 使用cvtColor()做色彩空间转换
def color_space_trans(img):
gray = cv.cvtColor(img, cv.COLOR_RGB2GRAY)
hsv = cv.cvtColor(img, cv.COLOR_RGB2HSV)
yuv = cv.cvtColor(img, cv.COLOR_RGB2YUV)
ycrcb = cv.cvtColor(img, cv.COLOR_RGB2YCrCb)
cv.imshow('gray', gray)
cv.imshow('hsv', hsv)
cv.imshow('yuv', yuv)
cv.imshow('ycrcb', ycrcb)
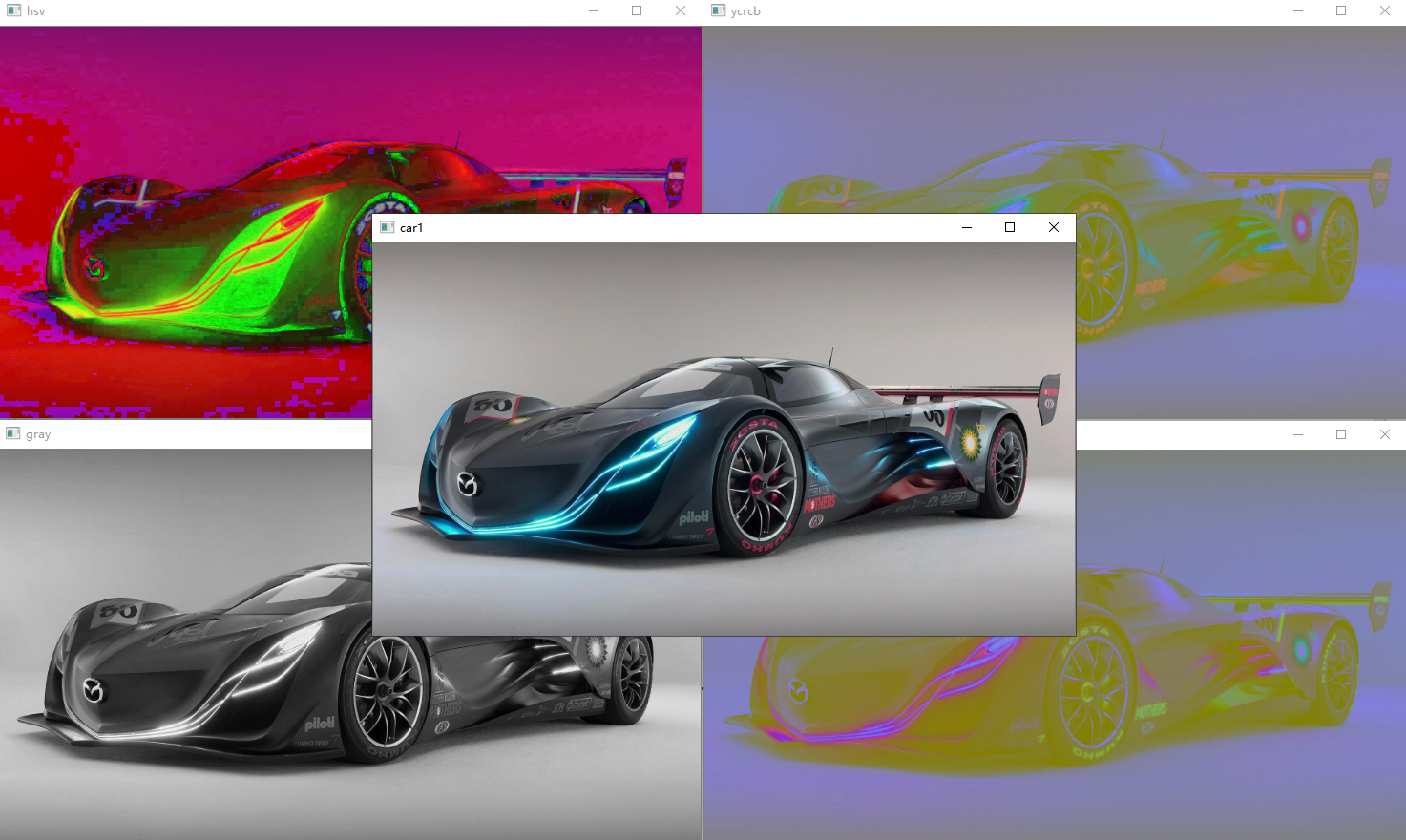
同样的,我们也可以使用cv.cvtColor(img,cv.COLOR_YUV2RGB),将其转回RGB色彩空间。
三、利用HSV色彩空间提取某个颜色
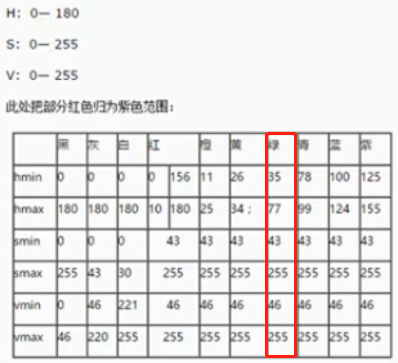
如上图,我们使用3个范围的值,可以过滤出图像中的绿色部分。如下例子:
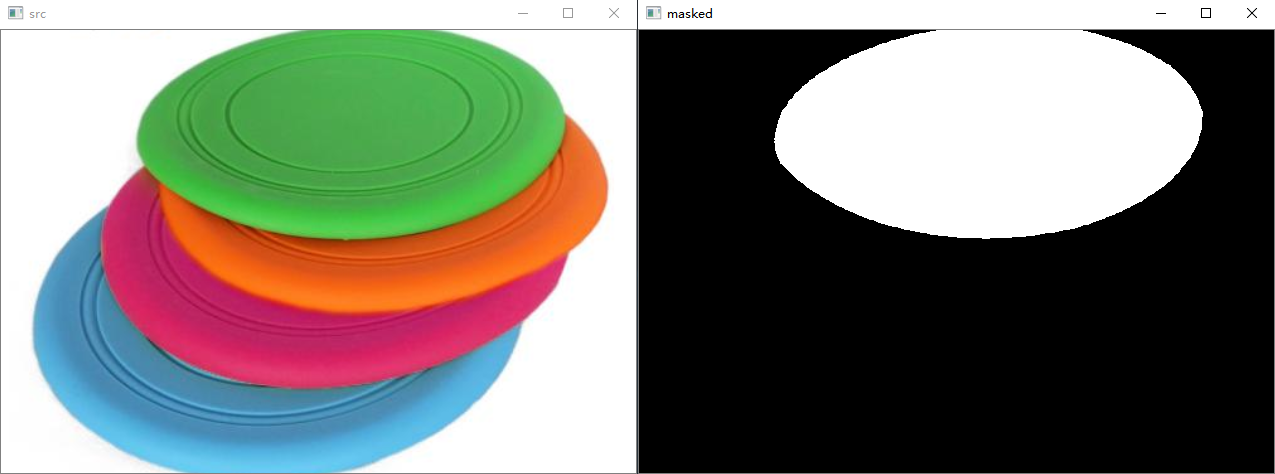
# 使用inRange()来获取HSV中某个范围的颜色
def filter_green():
img = cv.imread('plate2.png')
hsv = cv.cvtColor(img, cv.COLOR_RGB2HSV)
lower = np.array([35, 43, 46])
upper = np.array([77, 255, 255])
# 这里得到的masked是一个二值mask,即符合上述范围的位置为1,不符合为0
masked = cv.inRange(hsv, lowerb=lower, upperb=upper)
cv.imshow('src', img)
cv.imshow('masked', masked)
cv.waitKey(0)
四、分离和合并通道
def split_merge_channel():
img = cv.imread('girl1.png')
b, g, r = cv.split(img)
cv.imshow('blue', b)
cv.imshow('green', g)
cv.imshow('red', r) # 修改绿色通道的值
r[:] = 100
# 再将三个通道合并起来
merged = cv.merge([b, g, r])
cv.imshow('merged', merged)
cv.waitKey(0)

注意:默认用cv.imread(img_path)读进来的彩色图像是RGB的,但是从矩阵中来看,B是处于img[:,:,0]位置的,G在img[:,:,1],R在img[:,:,2]。如果使用cv.cvtColor(img,cv.COLOR_RGB2BGR)转换,则是将R和B的位置换了一下,但RGB的顺序还是2->1->0。
所以,一般使用默认读入的图像数据就好了。
五、图片的加减乘除
def add_img(img1, img2):
img_add = cv.add(img1, img2)
cv.imshow('add', img_add) def sub_img(img1, img2):
img_sub = cv.subtract(img1, img2)
cv.imshow('sub', img_sub) def mul_img(img1, img2):
img_sub = cv.multiply(img1, img2)
cv.imshow('multi', img_sub) def div_img(img1, img2):
img_sub = cv.divide(img1, img2)
cv.imshow('div', img_sub) image1 = cv.imread('WindowsLogo.jpg')
image2 = cv.imread('LinuxLogo.jpg') cv.imshow('windows', image1)
cv.imshow('linux', image2)
add_img(image1, image2)
sub_img(image1, image2)
mul_img(image1, image2)
div_img(image1, image2) cv.waitKey(0)
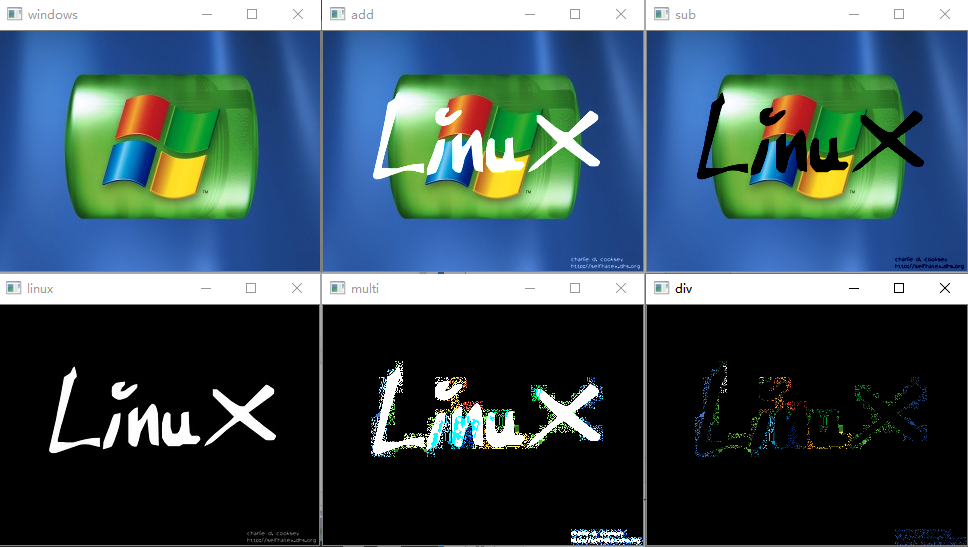
最左边两张图是原图,add是两图相加,当windows加上linux图片时,部分像素值超过255,被截取为255,所以显示为白色的linux字样。减法刚好相反,减去linux后,得到linux字样的负数,截取为0,所以显示为黑色。乘法中,linux字样的值为255,乘以对应windows中的像素,远超255,截取为255,显示白色。周边有一些彩色的点,是因为Linux的原图在那个位置可能有一定的噪声,稍微大于0,所以乘以windows中对应像素,显示彩色斑点。除法同样是这样。
六、计算图像均值和方差
# 计算均值和方差
def img_mean(img1, img2):
m1 = cv.mean(img1)
m2 = cv.mean(img2)
print(m1) # 输出(128.05269531250002, 109.60858072916668, 62.55748697916667, 0.0)
print(m2) # 输出(15.0128125, 15.0128125, 15.0128125, 0.0) # 同时计算均值和方差
def img_dev(img1, img2):
m1, d1 = cv.meanStdDev(img1)
m2, d2 = cv.meanStdDev(img2)
print(m1, d1)
#m1:[[128.05269531],[109.60858073],[ 62.55748698]]
#d1:[[54.60093646],[45.52335089],[50.01800277]]
print(m2, d2)
#m2:[[15.0128125],[15.0128125],[15.0128125]]
#d2:[[58.14062149],[58.14062149],[58.14062149]]
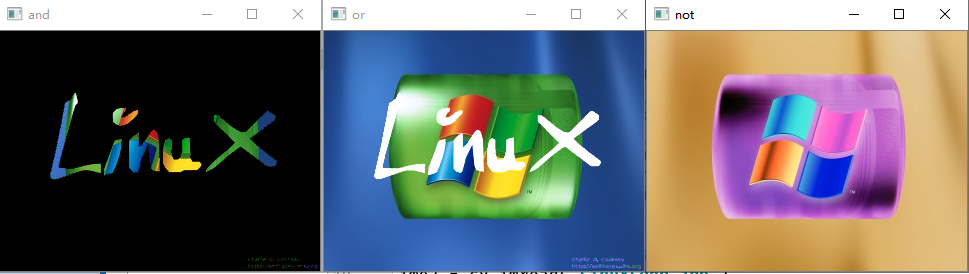
七、图片的逻辑计算
def logic_demo(img1, img2):
# 逻辑与
img_and = cv.bitwise_and(img1, img2)
# 逻辑或
img_or = cv.bitwise_or(img1, img2)
# 逻辑非(像素取补)
img_not = cv.bitwise_not(img1)
cv.imshow('and', img_and)
cv.imshow('or', img_or)
cv.imshow('not', img_not)
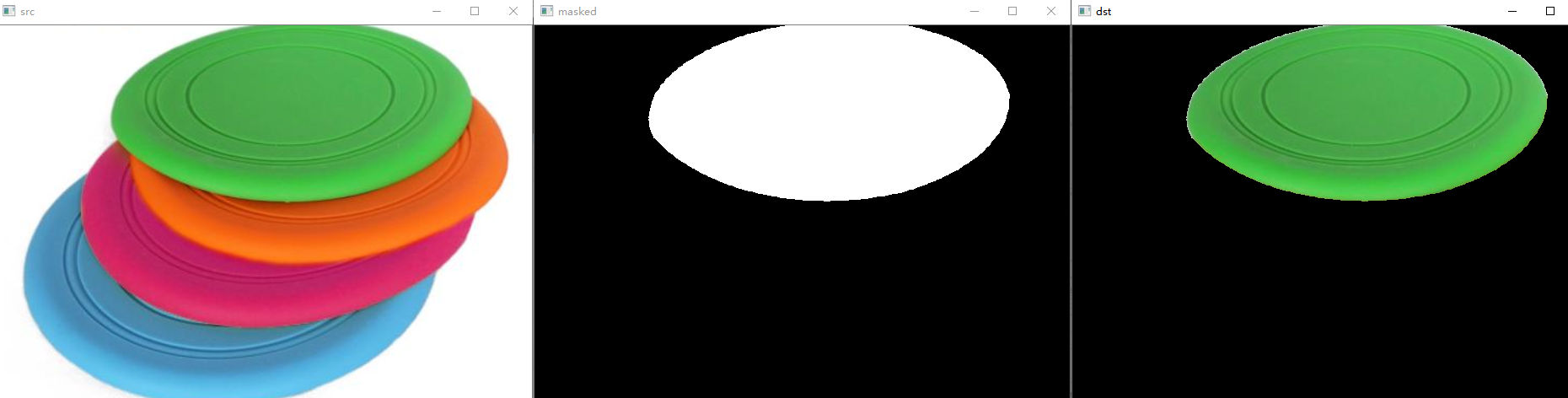
使用bitwise_add,用mask来过滤图像:
# 使用inRange()来获取HSV中某个范围的颜色
def filter_green():
img = cv.imread('plate2.png')
hsv = cv.cvtColor(img, cv.COLOR_RGB2HSV)
lower = np.array([35, 43, 46])
upper = np.array([77, 255, 255])
# 这里得到的masked是一个二值mask,即符合上述范围的位置为1,不符合为0
masked = cv.inRange(hsv, lowerb=lower, upperb=upper)
cv.imshow('src', img)
cv.imshow('masked', masked)
dst = cv.bitwise_and(img, img, mask=masked)
cv.imshow('dst', dst)
cv.waitKey(0)
八、addWeighted函数(图片加权求和)
def contract_brightness_demo(image, weight, bright):
h, w, c = image.shape
black = np.zeros([h, w, c], dtype=image.dtype)
dst = cv.addWeighted(image, weight, black, 1 - weight, bright)
cv.imshow('dst', dst)
contract_brightness_demo(img1,1.5,50)
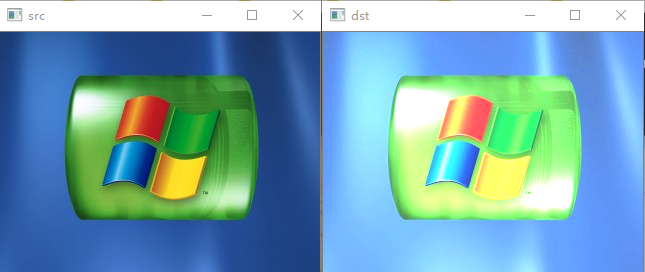
上述代码中调用addWeight函数,weight=1.5,即原图权重为1.5,由于第二张图片为全0(黑色),所以不管权重是多少都不产生效果。
addWeight(img1,weight1,img2,weight2,gamma,dst)函数的参数说明:
img1:第一张图片
weight1:第一张图片占的权重
img2:第二章图片
weight2:第二章图片占的权重
gamma:在最终结果上加减多少值
dst:图片输出,也可以用返回接受,即dst = addWeight(...)
九、ROI与泛洪填充
ROI:region of interest,感兴趣区域。
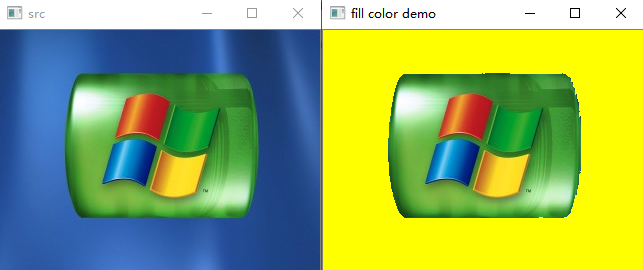
按像素差值范围泛洪填充:
# 从图片某个点开始泛洪填充,注意mask的h和w都需要比原图大2个像素
def fill_color_demo(image):
cv.imshow('src', image)
copy_img = image.copy()
h, w = image.shape[:2]
mask = np.zeros([h + 2, w + 2], np.uint8)
cv.floodFill(copy_img, # 被填充图片
mask, # mask的值都为0,表示都需要填充
(30, 30), # 以(30,30)点作为起始点
(0, 255, 255), # 填充为黄色
(100, 100, 100), # 最低起始值为(30,30)的BGR值减去(100,100,100)
(50, 50, 50), # 最高值为(30,30)的BGR加上(50,50,50)
cv.FLOODFILL_FIXED_RANGE) # 按像素Diff范围填充
cv.imshow("fill color demo", copy_img)
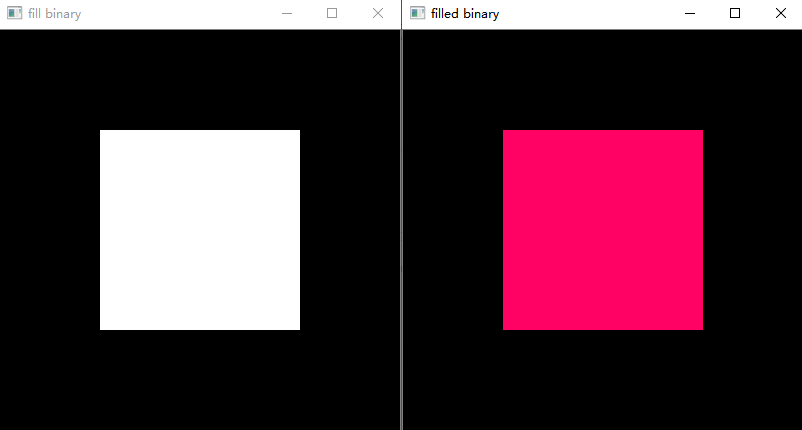
按mask来泛洪填充:
def fill_binary():
# 创建一个图片,中心的一个200x200的正方形为白色255,其余部分为黑色0
image = np.zeros([400, 400, 3], np.uint8)
image[100:300, 100:300, :] = 255
cv.imshow("fill binary", image)
# 创建一个mask,比被填充图片hw都大2像素,单通道
mask = np.ones([402, 402, 1], np.uint8)
# 中间200x200部分为0,表示需要填充,其余部分为1,表示不需要填充
mask[101:301, 101:301] = 0
# (200,200)为种子点即起始点,(100,2,255)为填充颜色
cv.floodFill(image, mask, (200, 200), (100, 2, 255), cv.FLOODFILL_MASK_ONLY)
cv.imshow('filled binary', image)
十、平滑(模糊)操作
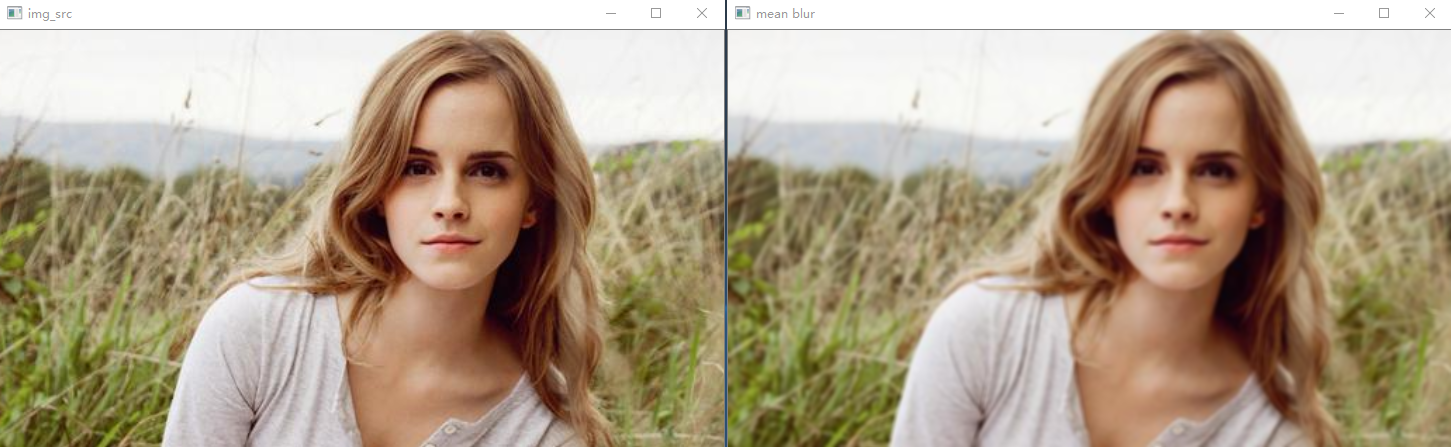
均值平滑:
# 均值模糊
def mean_blur(image):
img_blur = cv.blur(image, (5, 5))
cv.imshow('mean blur', img_blur)
方框平滑:
def box_blur(image):
img_blur = cv.boxFilter(image, -1, (5, 5), normalize=True)
cv.imshow('box blur', img_blur) img_blur2 = cv.boxFilter(image, -1, (5, 5), normalize=False)
cv.imshow('box blur 2', img_blur2)
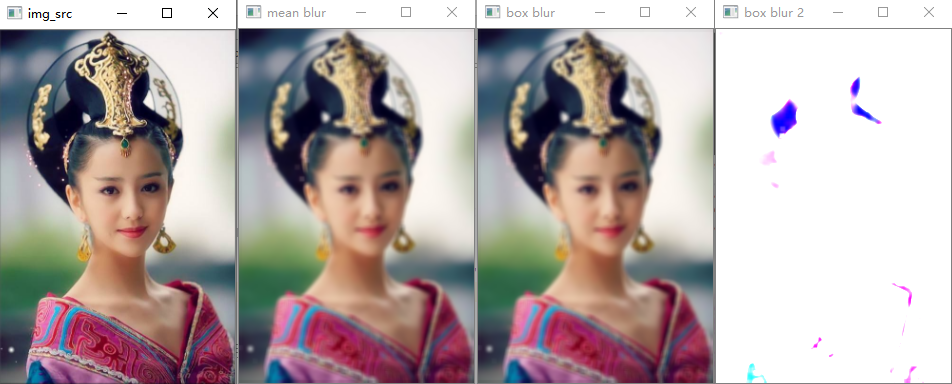
在方框平滑中,当normalize = True时,和均值平滑是一样的,即kernel覆盖区域的像素值加起来做平均。而当normalize=False时,只将像素值加起来,而不做平均,所以超过255部分全部截断为255,呈现白色。
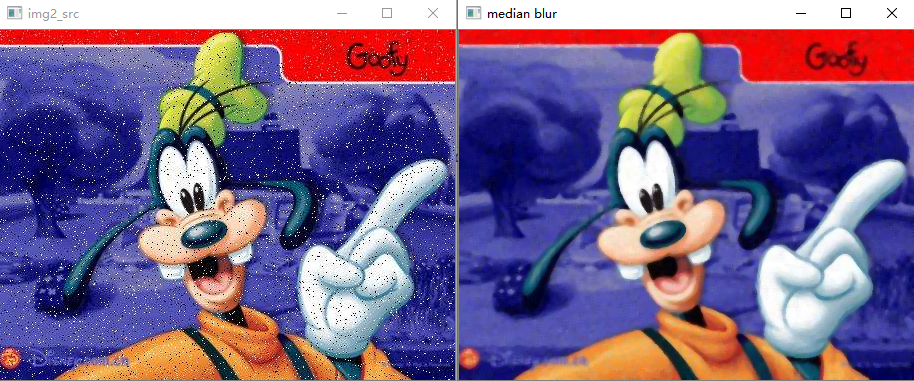
中值平滑:
# 中值模糊,用于去除校验噪声很有用
def median_blur(image):
# 中值模糊要求的ksize为一个整数
img_blur = cv.medianBlur(image, 5)
cv.imshow('median blur', img_blur)
自定义模糊:
# 自定义滤波
def custom_blur(image):
# 定义一个filter,均值滤波器
filter1 = np.ones((5, 5), np.float32) / 25
img = cv.filter2D(image, -1, kernel=filter1)
cv.imshow('img', img)
效果与均值模糊一样。
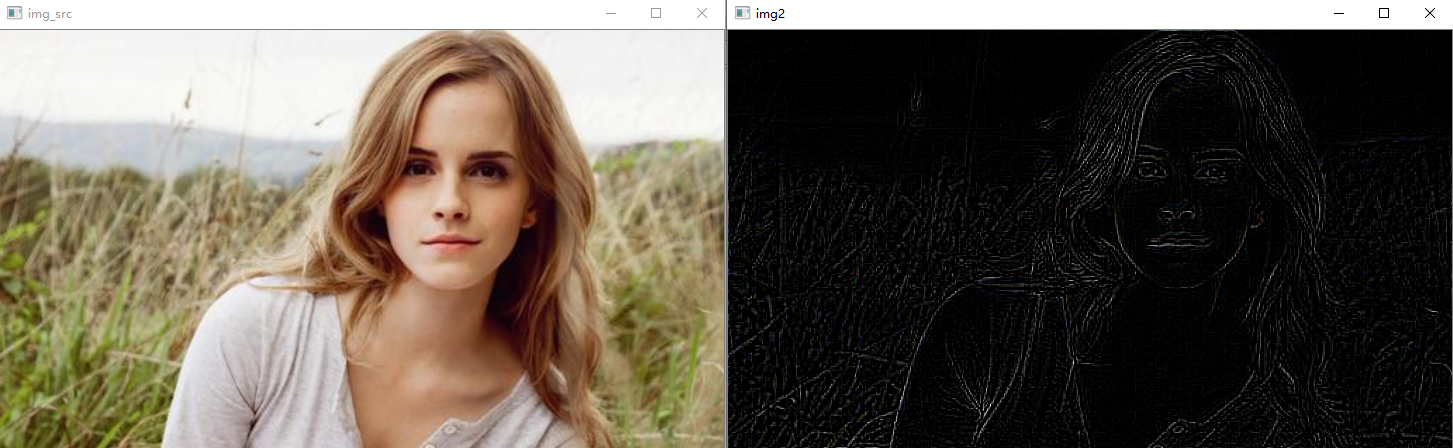
自定义filter:
def custom_filter(image):
# 定义一个拉普拉斯算子
filter2 = np.array([[-1, -1, -1], [-1, 8, -1], [-1, -1, -1]])
img2 = cv.filter2D(image, -1, kernel=filter2)
cv.imshow('img2', img2)
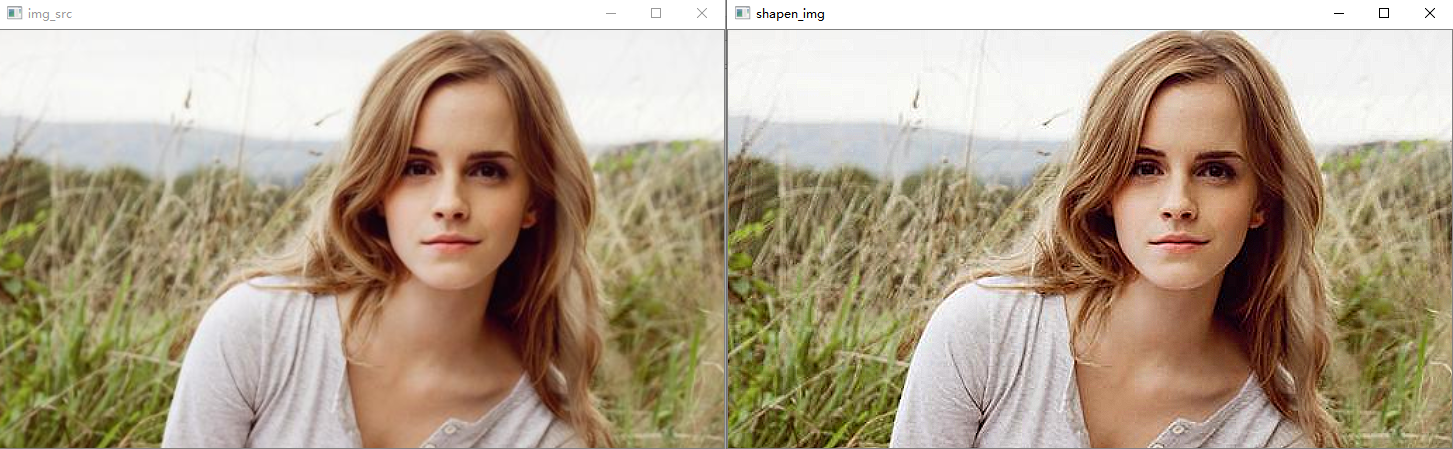
我们可以利用拉普卡斯算子做图像锐化:
def sharpen_image(image):
# 另一种拉普拉斯算子
filter = np.array([[0, -1, 0], [-1, 4, -1], [0, -1, 0]])
img = cv.filter2D(image, -1, kernel=filter)
cv.imshow('img', img) # filter的中心为5,相当于上面的拉普拉斯算子加上了原图像
filter2 = np.array([[0, -1, 0], [-1, 5, -1], [0, -1, 0]])
shapen_img = cv.filter2D(image, -1, kernel=filter2)
cv.imshow('shapen_img', shapen_img)
OpenCV笔记(1)(图片读取与现实、色彩空间、基础运算、均值方差、逻辑运算、泛洪填充、均值中值及自定义平滑)的更多相关文章
- OpenCV计算机视觉学习(4)——图像平滑处理(均值滤波,高斯滤波,中值滤波,双边滤波)
如果需要处理的原图及代码,请移步小编的GitHub地址 传送门:请点击我 如果点击有误:https://github.com/LeBron-Jian/ComputerVisionPractice &q ...
- Opencv笔记(八)——图像上的算数运算
学习目标: 学习图像上的算术运算,加法,减法,位运算等. 学习函数cv2.add(),cv2.addWeighted() 等. 一.图像的加法 你可以使用函数 cv2.add() 将两幅图像进行加法运 ...
- CV_图像滤波[转]---python+opencv均值滤波,高斯滤波,中值滤波,双边滤波
1.图像滤波算法(cv2) https://blog.csdn.net/qq_27261889/article/details/80822270 2.
- 【学习笔记】tensorflow图片读取
目录 图像基本概念 图像基本操作 图像基本操作API 图像读取API 狗图片读取 CIFAR-10二进制数据读取 TFRecords TFRecords存储 TFRecords读取方法 图像基本概念 ...
- opencv笔记3:trackbar简单使用
time:2015年 10月 03日 星期六 13:54:17 CST # opencv笔记3:trackbar简单使用 当需要测试某变量的一系列取值取值会产生什么结果时,适合用trackbar.看起 ...
- opencv笔记2:图像ROI
time:2015年 10月 03日 星期六 12:03:45 CST # opencv笔记2:图像ROI ROI ROI意思是Region Of Interests,感兴趣区域,是一个图中的一个子区 ...
- opencv笔记1:opencv的基本模块,以及环境搭建
opencv笔记1:opencv的基本模块,以及环境搭建 安装系统 使用fedora22-workstation-x86_64 安装opencv sudo dnf install opencv-dev ...
- opencv笔记4:模板运算和常见滤波操作
time:2015年10月04日 星期日 00时00分27秒 # opencv笔记4:模板运算和常见滤波操作 这一篇主要是学习模板运算,了解各种模板运算的运算过程和分类,理论方面主要参考<图像工 ...
- 怎么样用opencv将彩色图片转化成像素值只有0和255的灰度图?
分类: OpenCV [Q1]怎么样用opencv将彩色图片转化成像素值只有0和255的灰度图? 进行灰度化,IplImage* pImg = cvLoadImage( "C:\\1.b ...
随机推荐
- 简洁易懂说VLAN
简洁易懂说VLAN 1. VLAN概述 虚拟局域网(Virtual Local Area Network,VLAN),VLAN最主要的作用是分割局域网中广播域.传统交换机组成的LAN中,往往包含了成千 ...
- C#连接oracle数据库报错:OCIEnvCreate 失败,返回代码为 -1,但错误消息文本不可用
原因大概是OracleOraDb11g_home1TNSListener服务没启动的原因 步骤一.停止并重新启动OracleOraDb11g_home1TNSListener服务,试一下是否可行. 如 ...
- Laravel策略(Policy)示例
场景:当前用户创建的订单,只能当前用户自己看,可以通过授权策略类(Policy)来实现 1.php artisan make:policy OrderPolicy 成功后,默认只有一个构造方法.因为涉 ...
- linux分区知识
1.硬盘使用前,一般要分区,格式化(创建文件系统)--存放数据(极端情况下,可以不分区) 2.分区: 主分区. 扩展分区.逻辑分区 主分区+拓展分区的数量<=4,其中一个主分区可以用一个拓展分区 ...
- 【Spring 源码】ApplicationContext源码
ApplicationConetxt体系
- CF387B 【George and Round】
暴力还真的出奇迹了这题窝将读入的两个数组都先排个序,然后再枚举一遍就过了: 目前题解最短的代码QwQ.这里是代码 #include<bits/stdc++.h>using namespac ...
- spark教程(15)-Streaming
Spark Streaming 是一个分布式数据流处理框架,它可以近乎实时的处理流数据,它易编程,可以处理大量数据,并且能把实时数据与历史数据结合起来处理. Streaming 使得 spark 具有 ...
- vue路由守卫触发顺序
不同组件之间的路由跳转流程图 导航被触发(A–>B) 调用A组件内路由守卫beforeRouteLeave(to,from,next) 调用全局路由前置守卫router.beforeEach(t ...
- 关于ES5中的prototype与ES6中class继承的比较
ES5:继承: 1.ES5:继承 通过原型链实现继承.子类的prototype为父类对象的一个实例,因此子类的原型对象包含指向父类的原型对象的指针,父类的实例属性成为子类原型属性 2.ES6 的继承 ...
- centos7安装jdk和tomcat
1,先卸载掉openjdk rpm -qa | grep java 卸载 sudo rpm -e --nodeps 加 需要卸载的 或者直接 rpm -e `rpm -qa | grep java` ...