奥比中光Astra Pro在ROS系统中的使用
奥比中光Astra Pro在ROS系统中的使用
上一次介绍了Astra Pro在ubuntu中的使用,由于Astra Pro使用uvc传输彩色图像,所以当用rqt_image_view窗口
时,看不到彩色图。需要安装libuvc和libuvc_ros。
安装ROS功能包
sudo apt-get install ros-kinetic-astra-camera ros-kinetic-astra-launch
使用命令
roslaunch astra_launch astra.luanch
- libuvc的安装
cd ~
git clone https://github.com/ktossell/libuvc
cd libuvc
mkdir build
cd build
cmake ..
make && sudo make install
- libuvc_ros的安装
cd ~/catkin_ws/src
git clone https://github.com/ktossell/libuvc_ros
cd ..
catkin_make
- 编译错误及解决办法

提示找不到JpegPkg这个库。
我换回了旧版本的linuvc和libuvc_ros安装包,解决了这个问题。下载地址:
https://i.cnblogs.com/Files.aspx
先安装linuvc,按照上面的命令

安装linuvc_ros,按照上面的命令
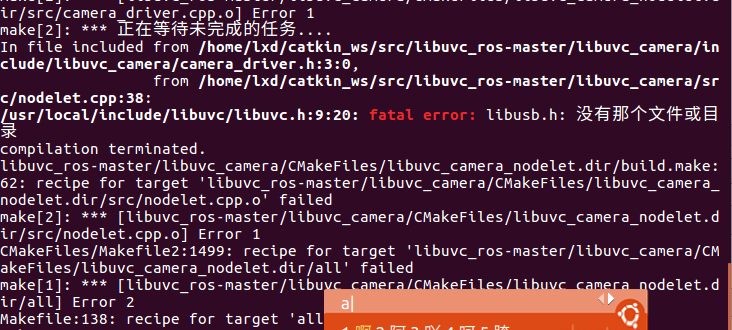
提示找不到头文件,没有libusb.h ,执行命令
sudo cp /usr/include/libusb-1.0/libusb.h /usr/local/include/libuvc/
修改权限
sudo nautilus
修改usr/local/include/libuvc/libuvc.h文件,在libusb.h前面加上libuvc,写好直接复制进去

重新编译,通过

- 测试
启动
roscore
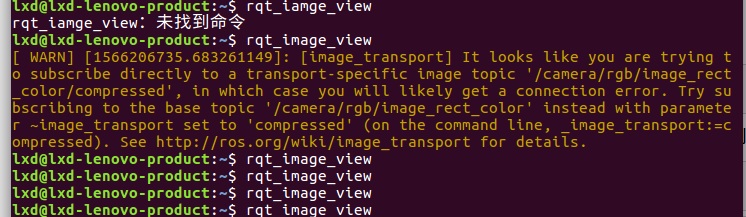
使用rosrun,注意要把ROS工作空间的环境变量添加到当前终端,不然会提示找不到libuvc_camera包
rosrun libuvc_camera camera_node
当前终端添加
cd catkin_make
source devel/setup.bash
echo $ROS_PACKAGE_PATH 所有终端
echo :source/WORKSPACE/devel/setup.bash">>~/.bashrc
WORKSPACE为工作空间的路径

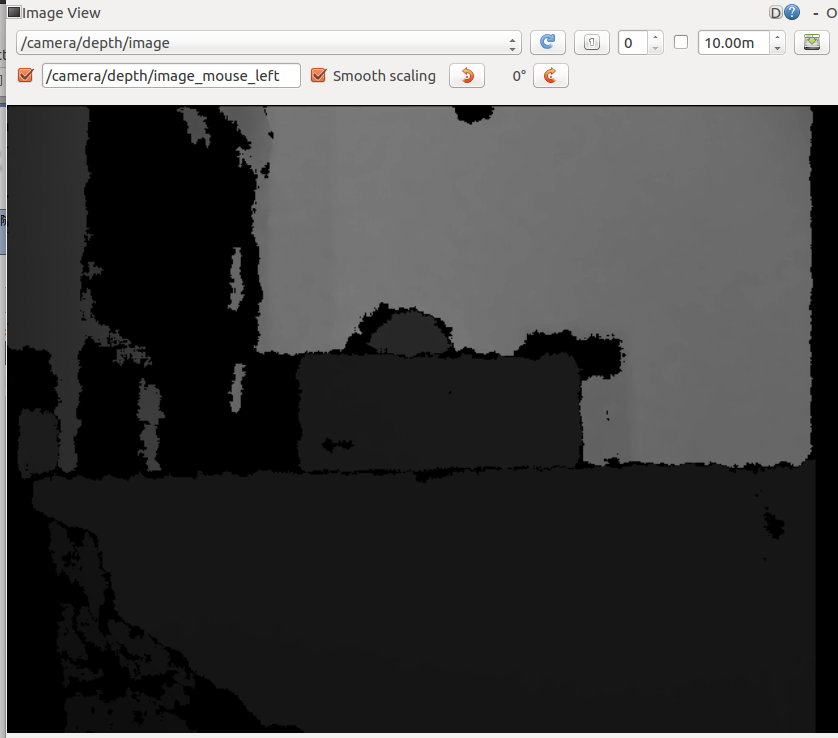
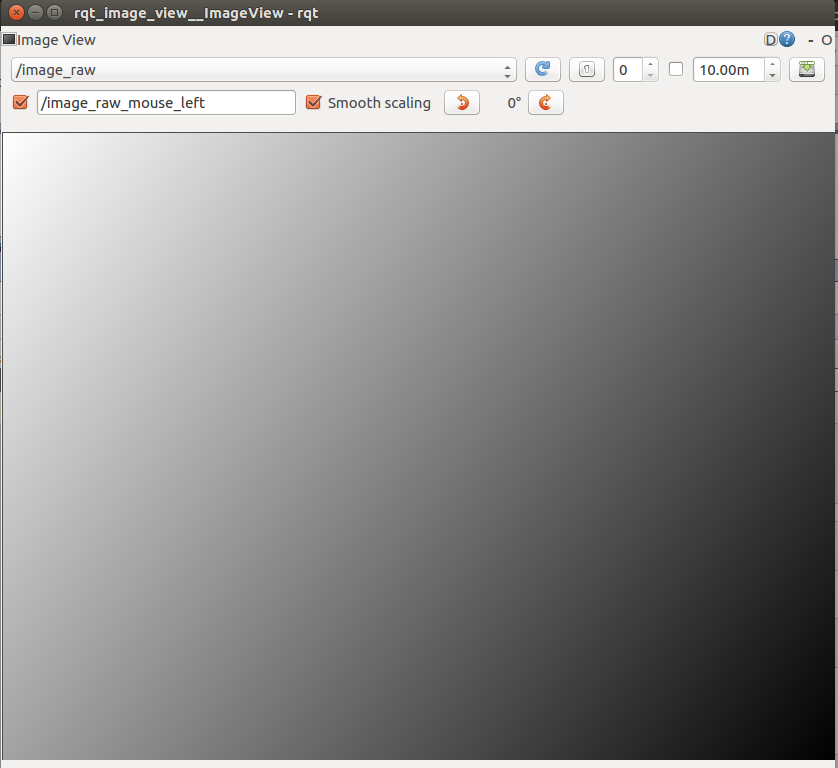
运行
rqt_image_view
成功!
参考https://blog.csdn.net/zhangrelay/article/details/53515859#commentsedit
https://www.cnblogs.com/li-yao7758258/p/11234864.html
奥比中光Astra Pro在ROS系统中的使用的更多相关文章
- 奥比中光Astra Pro的使用(1)
在ubuntu上的使用 首先下载SDK以及OpenNI安装包,下载地址: 解压两个安装包 切换目录到AstraSDK-Linux下的install目录,并输入命令:sudo sh ./install. ...
- 熟悉ROS系统中的话题
描述:这篇教程主要讲解ROS系统中的话题及rostopic和rqt_plot等命令工具: 1. Setup安装1.1 roscore 首先确保roscore已经启动运行,打开一个新的命令终端,输入如下 ...
- ROS系统python代码测试之rostest
ROS系统中提供了测试框架,可以实现python/c++代码的单元测试,python和C++通过不同的方式实现, 之后的两篇文档分别详细介绍各自的实现步骤,以及测试结果和覆盖率的获取. ROS系统中p ...
- SLAM+语音机器人DIY系列:(二)ROS入门——2.ROS系统整体架构
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- ROS学习笔记二:ROS系统架构及概念
本文主要是了解ROS的系统架构.文件夹结构以及工作所需的核心文件. ROS系统架构主要被设计和划分为三部分,每一部分代表一个层级的概念:文件系统级(The filesystem level).计算图级 ...
- 【转载】ROS系统整体架构
目录 1.从文件系统级理解 2.从计算图级理解 3.从开源社区级理解 由于ROS系统的组织架构比较复杂,简单从一个方面来说明很难说清楚.按照ROS官方的说法,我们可以从3个方面来理解ROS系统整体架构 ...
- ROS-2 : ROS系统层级结构
一.ROS文件系统层级 ROS的文件和文件夹按如下层级来组织:
- 奥比中光Orbbec Astra Pro RGBD 3D视觉传感器在ROS(indigo和kinetic)使用说明 rgb depth同时显示
Orbbec Astra Pro传感器在ROS(indigo和kinetic)使用说明 rgb depth同时显示 这款摄像头使用uvc输入彩色信息,需要libuvc和libuvc_ros这样才能在R ...
- 在ROS(indigo)中读取手机GPS用于机器人定位~GPS2BT在ubuntu和window系统下的使用方法~
在ROS(indigo)中读取手机GPS用于机器人定位~GPS2BT在ubuntu和window系统下的使用方法~ 不需要额外购买GPS设备. 将手机GPS数据通过蓝牙传输给计算机使用,当然通过类似方 ...
随机推荐
- 快速排序java代码
法一: //快速排序 通过测试 public class QuickSortTest2 { public static void quickSort(int[] data,int low,int hi ...
- Golang闭包和匿名函数
1. 匿名函数 匿名函数就是没有函数名的函数,如下所示. func test() int { max := func(a, b int) int { if a > b { return a } ...
- HTTP 请求出现 405 not allowed 的一种解决办法
问题:http post请求网页会出现405 原因: Apache.IIS.Nginx等绝大多数web服务器,都不允许静态文件响应POST请求 解决:将post请求改为get请求
- QT Creator有中文出现“常量中有换行符 ”的解决办法
QT Creator有中文出现“常量中有换行符 ”的解决办法 QT Creator在QT5.9下报错“常量中有换行符 ”,我的代码中有中文,而且在Windows 10下用微软VS编译器编译.造成这个报 ...
- python 文件定位
tell()方法告诉你文件内的当前位置, 换句话说,下一次的读写会发生在文件开头这么多字节之后. seek(offset [,from])方法改变当前文件的位置.Offset变量表示要移动的字节数.F ...
- 51 Nod 不重叠的线段
#include<bits/stdc++.h> #define in(X) scanf("%d",&X) #define out(X) printf(" ...
- Springboot 使用Jedis
Springboot 使用Jedis 依赖 <dependency> <groupId>org.springframework.boot</groupId> < ...
- jenkins集成python的单元测试
最近在研究jenkins的集成,然后想把自己写的python工具也用jenkins集成一下 废话少说,来看结构 sparking.py ''' @author: lianying ''' class ...
- 将JDBC查询出的数据转化为json格式返回
使用JDBC,json工具使用的org.json /** * ResultSet转JSON * * @param rs * @return * @throws SQLException * @thro ...
- vi 学习
1,光标移动 1)h:左:l:右:j:下:k:上:和方向键不同的是,不会造成折行 2)0:行首:$行尾:G:最后一行第一个字符;gg:第一行第一个字符:^:本行第一个非空白字符:H:移至屏幕第一个字符 ...