基于ROBO-MAS多智能体自主协同 高频投影定位系统

![]()
系统简介
基于ROBO-MAS多智能体自主协同高频投影定位系统通过采用ROBO-MAS桌面型群体智能机器人,在小型实验场地内通过高频光电投影定位技术实现机器人位置感知和数据通讯,实现“开放式群体智能研究和多智能体自主协同”的研究目标。
系统为群体智能研究和多机器人任务协同研究搭建基础科研平台,系统完全开放软硬件接口,提供人机交互软件控制系统中智能机器人路径规划、自主避障、智能跟随、自动循迹、群体协作等群体智能算法所需要的的位置、方向、速度、加速度等数据接口,高度支持二次开发和科研任务移植。系统为群体智能研究提供模拟仿真平台,可实现群体智能算法的实物验证,以为群体智能算法的推广应用提供实际案例和数据支撑。
系统支持多研究方向
在动态不可预测多智能体环境中,重点可以研究以下课题:
智能机器人自主感知、组网算法、多机器人目标协同定位算法、多机器人自主动态决策与路径规划算法、多机器人区域覆盖算法、智能蚁群算法、粒子群算法、蚁群优化算法、蚁群聚类算法、单片机微机原理和编程语言、信号调理电路和控制电路、各种通信协议和通信方式、电机和传感器等硬件资源的应用
拓展应用:
科学研究、群体智能算法、多机器人智能协同、智能群体模拟演练、消防演练(地震、火灾、逃生、救灾)、人员自然流动(疫情传播模拟) 、体育运动模拟(接力赛、足球赛:基于跟随)、智能交通、物流分配模拟、模拟建模、自然群体(蚁群,鱼群,鸟群,细菌)、分子扩散(有害气体模型)、消息传播模型、游戏娱乐、迷宫地图、棋子类游戏(跳棋等)
系统架构与功能:

![]()

![]()
系统包括人机交互软件控制系统、ROBO-MAS智能机器人、光学投影定位模块、射频无线网络通信模块、无线充电平台
系统功能:
实时定位、自主避障、路径规划、智能跟随/用户控制、自动循迹/路径匹配、一键充电/自主返航充电等功能。
ROBO-MAS智能机器人
ROBO-MAS智能机器人搭载光电定位传感器、红外避障传感器、六轴惯性传感器模块、主控芯片处理器、无线充电模块、射频无线通信模块、电池管理模块、电机驱动、直流电机、编码器。可实时检测机器人的位置、方位角、速度和加速度等信息,经处理器采集处理后通过无线射频通信模块实时反馈至上位机软件控制系统作为路径规划、避障、跟随和循迹等控制算法的原始数据来源。

![]()
技术参数:
- 处理器:STM32F0C8T6;
- 传感器:2个光电接收传感器;6个红外线传感器;
- 3个LED三色灯;
- 通讯:2.4GHZ射频模块;
- 运动速度:约10~25cm/秒;
- 尺寸:直径50mm,高度46mm;
- 重量:72g;
- 电池:4.2V,锂电池700mAh;
- 续航约:30分钟;

![]()
高频投影定位系统
高频投影仪系统包含两个子系统,光引擎系统和驱动系统,以及散热器和风扇等设备。高频投影仪系统可用于三维重建、三维测量、平面定位等。三维重建和测量主要是通过高频投影仪将结构光投影至被测物体上,并通过摄像机进行拍摄,并根据三维坐标和二维坐标的转换得到其深度。平面定位是一套定位毫米级的定位系统。
技术参数:
- 光引擎包括:红色、绿色和蓝色光谱;以及912×1140钻石像素0.45英寸结构光超分辨显微镜。
- 驱动系统含LED驱动电路,数字控制器,电源管理电路,DVI TO RGB转换等设备。
- 含高频播放的格雷码编制的黑白条纹图片序列。
- 含播放格雷码编制图片序列的配置文件。
- 标准投影面积为长 1500mm 宽960mm,横坐标像素点定位精度为1.67mm 纵坐标像素点定位精度为1.69mm。
- 提供高频投影实现平面定位的操作说明手册。
无线通讯控制系统
群体智能无线通讯控制系统含单体智能无线接收模块和USB中继接收模块,具有多点通信、调频通信、功耗低等诸多优点。
单体智能无线接收模块是自主定位和通信组网模块,通过串口通讯加装在ROBO-MAS微型移动机器人上,来实现微型机器人的定位和通信组网。它内含光电接收传感器、STM32F0C8T6处理器、NRF24L01+通信芯片、板载2.4GHZ天线、电源管理芯片等。
USB中继接收模块是一款通信中间件模块,它与PC端采用USB接口连接方式,PC端软件通过该模块能够查询或设置ROBO-MAS机器人,中继接收模块能够实时管理查询多个微型移动机器人。
群体智能决策软件系统
群体智能决策软件系统是多智能体自主协作仿真以及实物验证的软件平台系统,用于多机器人群体行为决策的仿真、机器人路径规划、机器人状态显示等,实现对多个微型移动机器人间通讯管理和信息交互。
群体智能决策软件系统分为应用层、仿真层、服务层、通信层四部分。应用层提供二种协作案例(图形模式、手绘模式)和底层二次开发模式,仿真层含机器人节点的新增、删除,机器人的路径规划,机器人目标点设置等。服务层包含软件系统获取机器人本体的位置和状态。通讯层包含软件系统与中继接收模块之间的通信。
实验场景
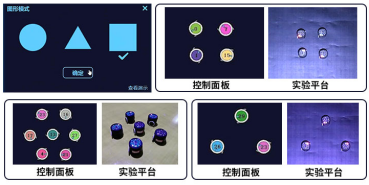
为方便用户快速熟悉群体智能协作平台,直观展示群体智能的运用与开发内容,我们提供两种协作模式,以及复杂算法的二次开发底层代码:
1、图形模式:在上位机软件上选择如圆形、五角星形、正方形、数字等图形,机器人自动根据配置数量排列出对应形状
2、手绘模式:在上位机显示的窗口内画图或写字,系统会自动分析、识别图形,根据机器人的数量自动排列出对应图案
3、二次开发:提供底层通讯协议和API接口,以及相关demo。
(1)提供机器人端与群体智能协作系统的通信协议。
(2)提供机器人模块目标速度控制接口
(3)提供机器人模块目标角度控制接口
(4)提供机器人单体避障算法与demo
(5)提供机器人群体队列保持算法demo
(6)提供机器人跟随算法demo
(7)提供高频定位系统平面坐标输出接口demo
(8)图形模式算法demo(自主路径规划)
(9)画图模式算法demo(自主路径规划)
(10)实时手势控制算法demo。
(11)环境感知:协同感知算法demo
![]()

![]()
实验室效果图:

![]()
![]()

![]()

![]()
基于ROBO-MAS多智能体自主协同 高频投影定位系统的更多相关文章
- 基于E-PUCK 2.0多智能体自主协同 高频投影定位系统
群体智能机器人是一种国际前沿的人工智能研究项目,由多个小型机器人组成的集群式解决系统,灵感源于蚂蚁.蜜蜂.鱼等群体生物,在没有统一领导的情况下,也能合作执行大量复杂的任务,比如组建一个图形,再在此基础 ...
- 多智能体系统(MAS)简介
1.背景 自然界中大量个体聚集时往往能够形成协调.有序,甚至令人感到震撼的运动场景,比如天空中集体翱翔的庞大的鸟群.海洋中成群游动的鱼群,陆地上合作捕猎的狼群.这些群体现象所表现出的分布.协调.自 ...
- 基于能量收集的智能家居-2013国家级大学生创业实践项目申报_商业计划书_V0.2
SmartHome项目商业计划 基于能量收集的 免电池无线智能家居系统 IA-SmartHome团队 2012.12 l 基于无线的智能家居解决方案,节省施工成本: l 基于能 ...
- TensorFlow利用A3C算法训练智能体玩CartPole游戏
本教程讲解如何使用深度强化学习训练一个可以在 CartPole 游戏中获胜的模型.研究人员使用 tf.keras.OpenAI 训练了一个使用「异步优势动作评价」(Asynchronous Advan ...
- 伯克利推出「看视频学动作」的AI智能体
伯克利曾经提出 DeepMimic框架,让智能体模仿参考动作片段来学习高难度技能.但这些参考片段都是经过动作捕捉合成的高度结构化数据,数据本身的获取需要很高的成本.而近日,他们又更进一步,提出了可以直 ...
- DRL 教程 | 如何保持运动小车上的旗杆屹立不倒?TensorFlow利用A3C算法训练智能体玩CartPole游戏
本教程讲解如何使用深度强化学习训练一个可以在 CartPole 游戏中获胜的模型.研究人员使用 tf.keras.OpenAI 训练了一个使用「异步优势动作评价」(Asynchronous Advan ...
- STM32W108无线传感器网络节点自组织与移动智能体导航技术
使用STM32W108无线开发板及节点完毕大规模网络的自组建,网络模型选择树型,网络组建完毕之后,使用基于接收信号强度指示RSSI(ReceivedSignal Strength Indication ...
- 基于Laravel+Swoole开发智能家居后端
基于Laravel+Swoole开发智能家居后端 在上一篇<Laravel如何优雅的使用Swoole>中我已经大概谈到了Laravel结合Swoole的用法. 今天,我参与的智能家居项目基 ...
- 【单片机】基于有方GPRS的智能电梯控制系统
前一篇文章<时钟及温度的显示>中所介绍的作品,是作为一个单片机新手在暑假学了一个月的单片机之后,做的第一个综合性作品,涵盖了二极管.蜂鸣器.数码管.液晶屏.按键.时钟芯片.温度传感器的控制 ...
随机推荐
- 学JAVA的艰难之路
周五回家了,这两天也没有更新代码系列,很抱歉,之后会补上.今天刚到宿舍,写了会代码,想用一个数组的从键盘输入,再也弄不好了,最终在我不断的翻之前写的代码,终于是找到了一个例子,真的不容易,编程这东西, ...
- [Windows] Prism 8.0 入门(上):Prism.Core
1. Prism 简介 Prism 是一个用于构建松耦合.可维护和可测试的 XAML 应用的框架,它支持所有还活着的基于 XAML 的平台,包括 WPF.Xamarin Forms.WinUI 和 U ...
- DVWA SQL Injection High
High 虽然是high等级,但是通过源码审计发现与low等级一样,没有对传入的值做任何过滤,唯一不同的就是点击连接后打开了另外一个对话框,用户在新打开的页面输入 其余的步骤与low级别的一样:htt ...
- 第五篇 Scrum 冲刺博客
一.站立式会议 1. 会议照片 2. 工作汇报 团队成员名称 昨日(26日)完成的工作 今天(27日)计划完成的工作 工作中遇到的困难 陈锐基 - 完成发布页面的布局- 完成发布动态的功能 - 优化当 ...
- js 几种跨域解决方法
同源策略: JS只能与同一个域中的页面进行通讯,必须是协议.域名.端口都相同,相同域下才能相互通信,这可以被认为是一种通信原则,叫同源策略. 跨域: js跨域是指通过js在不同的域之间进行数据传输或通 ...
- 【补题记录】NOIp-提高/CSP-S 刷题记录
Intro 众所周知原题没写过是很吃亏的,突然发现自己许多联赛题未补,故开此坑. 在基本补完前会持续更新,希望在 NOIp2020 前填完. 虽然是"联赛题",但不少题目还是富有思 ...
- P6007 [USACO20JAN]Springboards G
本题解仅用与作者加深算法理解,也欢迎大家的阅读 做题背景 原本关于二维的点的 \(dp\) 问题一直都没有什么想法,昨天晚上再做一道 \(cdq\) 的题目的时候被同学询问了这道题,发现可以用二维偏序 ...
- 题解-[SDOI2016]征途
[SDOI2016]征途 [SDOI2016]征途 给定长度为 \(n\) 的序列 \(a\{n\}\),将其分为连续 \(m\) 段,和分别为 \(v\{m\}\).\(v\{m\}\) 的方差为 ...
- tornado 网页提交内容 展示内容作业
s2.py import tornado.ioloop import tornado.web text_list=[] class MainHandler(tornado.web.RequestHan ...
- .Net Core Excel导入导出神器Npoi.Mapper
前言 我们在日常开发中对Excel的操作可能会比较频繁,好多功能都会涉及到Excel的操作.在.Net Core中大家可能使用Npoi比较多,这款软件功能也十分强大,而且接近原始编程.但是直接使用Np ...