ConcurrentHashMap怎么保证安全的
HashMap是一个线程不安全的容器,当容量大于总量*负载因子发生扩容时可能会出现环形链表从而导致死循环
扩容就是rehash,这个会重新将原数组的内容重新hash到新的扩容数组中,在多线程的环境下,存在同时其他的元素也在进行put操作,如果hash值相同,可能出现同时在同一数组下用链表表示
因此引进了线程安全的容器ConcurrentHashMap
ConcurrentHashMap在JDK1.7 和 JDK1.8中的实现有所不同
JDK1.7中的实现
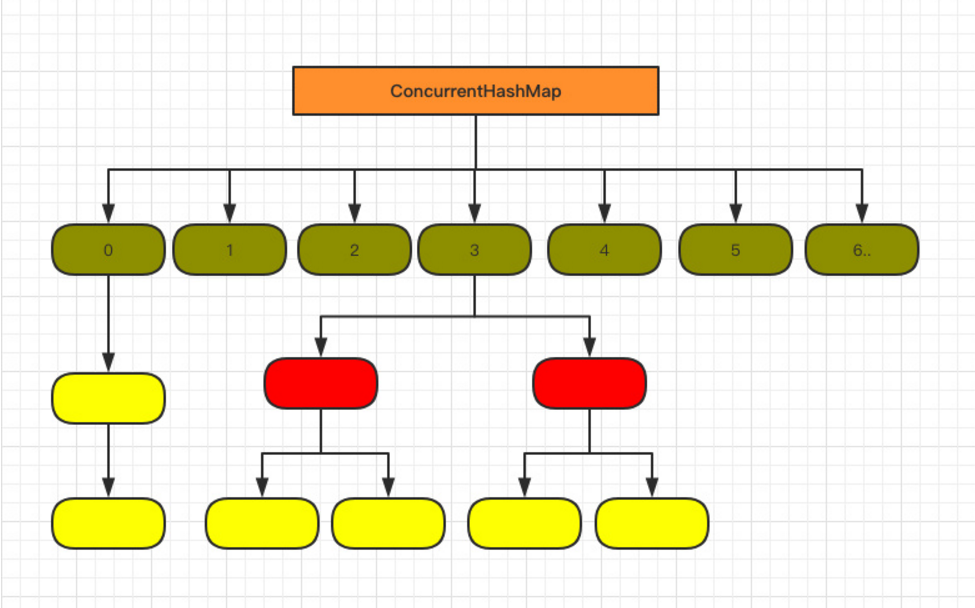
先来看看1.7中数据结构实现的图示

由图中可以看出ConcurrentHashMap是由Segment数组,HashEntry数组组成的。这里和HashMap一样,都是数组+链表的形式
ConcurrentHashMap采用了分段锁的技术,其中一个Segement就是一个Lock,其继承自ReentrantLock,这样当一个线程占用了锁访问一个Segment时,不会影响到其它的Segment
Segment数组的意义就是将一个大的table分成多个小的table来进行加锁,而一个Segment存储的是HashEntry数组+链表,这和HashMap的数据结构一致
Segment的大小最多65536个,没有指定concurrencyLevel元素初始化,Segment的大小ssize默认为16
每一个Segment元素下的HashEntry的初始化也是按照位于运算来计算
int cap = 1;
while (cap < c)
cap <<= 1;
所以,HashEntry数组的最小为2
get 方法
ConcurrentHashMap的get方法在整个过程中都不需要加锁
执行get方法的时候,需要先将key通过hash之后定位到具体的Segment,然后再通过一次hash定位到具体的元素上。
注意:为了保证可见性,HashEntry中的 value属性使用了volatile修饰
put 方法
内部 HashEntry 类
static final class HashEntry<K,V> {
final int hash;
final K key;
volatile V value;
volatile HashEntry<K,V> next;
HashEntry(int hash, K key, V value, HashEntry<K,V> next) {
this.hash = hash;
this.key = key;
this.value = value;
this.next = next;
}
}
虽然 HashEntry 中的 value 是用 volatile 关键词修饰的,但是并不能保证并发的原子性,所以 put 操作时仍然需要加锁处理
首先也是通过 Key 的 Hash 定位到具体的 Segment,在 put 之前会进行一次扩容校验。
Segment实现了ReentrantLock,也就带有锁的功能,当执行put操作时,会进行第一次key的hash来定位Segment的位置,如果该Segment还没有初始化,即通过CAS操作进行赋值,然后进行第二次hash操作,找到相应的HashEntry的位置,这里会利用继承过来的锁的特性,在将数据插入指定的HashEntry位置时(链表的尾端),会通过继承ReentrantLock的tryLock()方法尝试去获取锁,如果获取成功就直接插入相应的位置,如果已经有线程获取该Segment的锁,那当前线程会以自旋的方式去继续的调用tryLock()方法去获取锁,超过指定次数就挂起,等待唤醒。
size 方法
每一个Segment都有一个volatile修饰的全局变量count,要获取整个Map集合的size的时候,就需要获取每个Segment的count,然后累加起来。虽然count变量被volatile修饰符修饰,但这个不能保证操作的原子性,可能出现当获取size的时候还有其它线程在做插入操作。这样就引发了并发的问题
但是如果在获取size的时候将其它操作也加锁,这样就造成效率问题
所以解决的办法是:先尝试两次将count累加,当两次结果不一致时,才加锁来统计count
Councurrent 中每一个Segment都包含一个modCount变量,每当进行一次添加/删除操作,modCount的值就会发生变化,只要modCount发生变化那么就认为容器大小也在发生变化
JDK 1.8实现
先来看看1.8中数据结构实现的图示
JDK 1.8中的ConcurrentHashMap和1.7中的实现有着明显的差异
其中抛弃了原有的 Segment 分段锁,而采用了 CAS + synchronized 来保证并发安全性.
采用了Node数组+链表+红黑树的数据结构来实现
基本常量设计和数据结构
在深入了解JDK1.8中的ConcurrentHashMap前,先来了解一下基本常量和数据结构
// node数组最大容量:2^30=1073741824
private static final int MAXIMUM_CAPACITY = 1 << 30;
// 默认初始值,必须是2的幕数
private static final int DEFAULT_CAPACITY = 16;
//数组可能最大值,需要与toArray()相关方法关联
static final int MAX_ARRAY_SIZE = Integer.MAX_VALUE - 8;
//并发级别,遗留下来的,为兼容以前的版本
private static final int DEFAULT_CONCURRENCY_LEVEL = 16;
// 负载因子
private static final float LOAD_FACTOR = 0.75f;
// 链表转红黑树阀值,> 8 链表转换为红黑树
static final int TREEIFY_THRESHOLD = 8;
//树转链表阀值,小于等于6(tranfer时,lc、hc=0两个计数器分别++记录原bin、新binTreeNode数量,<=UNTREEIFY_THRESHOLD 则untreeify(lo))
static final int UNTREEIFY_THRESHOLD = 6;
static final int MIN_TREEIFY_CAPACITY = 64;
private static final int MIN_TRANSFER_STRIDE = 16;
private static int RESIZE_STAMP_BITS = 16;
// 2^15-1,help resize的最大线程数
private static final int MAX_RESIZERS = (1 << (32 - RESIZE_STAMP_BITS)) - 1;
// 32-16=16,sizeCtl中记录size大小的偏移量
private static final int RESIZE_STAMP_SHIFT = 32 - RESIZE_STAMP_BITS;
// forwarding nodes的hash值
static final int MOVED = -1;
// 树根节点的hash值
static final int TREEBIN = -2;
// ReservationNode的hash值
static final int RESERVED = -3;
// 可用处理器数量
static final int NCPU = Runtime.getRuntime().availableProcessors();
//存放node的数组
transient volatile Node<K,V>[] table;
/*控制标识符,用来控制table的初始化和扩容的操作,不同的值有不同的含义
*当为负数时:-1代表正在初始化,-N代表有N-1个线程正在 进行扩容
*当为0时:代表当时的table还没有被初始化
*当为正数时:表示初始化或者下一次进行扩容的大小
private transient volatile int sizeCtl;
Node的数据结构
static class Node<K,V> implements Map.Entry<K,V> {
final int hash;
final K key;
volatile V val;
volatile Node<K,V> next;
Node(int hash, K key, V val, Node<K,V> next) {
this.hash = hash;
this.key = key;
this.val = val;
this.next = next;
}
public final K getKey() { return key; }
public final V getValue() { return val; }
public final int hashCode() { return key.hashCode() ^ val.hashCode(); }
public final String toString(){ return key + "=" + val; }
public final V setValue(V value) {
throw new UnsupportedOperationException();
}
public final boolean equals(Object o) {
Object k, v, u; Map.Entry<?,?> e;
return ((o instanceof Map.Entry) &&
(k = (e = (Map.Entry<?,?>)o).getKey()) != null &&
(v = e.getValue()) != null &&
(k == key || k.equals(key)) &&
(v == (u = val) || v.equals(u)));
}
//用于map中的get()方法,子类重写
Node<K,V> find(int h, Object k) {
Node<K,V> e = this;
if (k != null) {
do {
K ek;
if (e.hash == h &&
((ek = e.key) == k || (ek != null && k.equals(ek))))
return e;
} while ((e = e.next) != null);
}
return null;
}
}
TreeNode的数据结构
TreeNode继承与Node,但是数据结构换成了二叉树结构,它是红黑树的数据的存储结构,用于红黑树中存储数据,当链表的节点数大于8时会转换成红黑树的结构,他就是通过TreeNode作为存储结构代替Node来转换成黑红树
红黑树数据结构源代码
static final class TreeNode<K,V> extends Node<K,V> {
//树形结构的属性定义
TreeNode<K,V> parent; // red-black tree links
TreeNode<K,V> left;
TreeNode<K,V> right;
TreeNode<K,V> prev; // needed to unlink next upon deletion
boolean red; //标志红黑树的红节点
TreeNode(int hash, K key, V val, Node<K,V> next,
TreeNode<K,V> parent) {
super(hash, key, val, next);
this.parent = parent;
}
Node<K,V> find(int h, Object k) {
return findTreeNode(h, k, null);
}
//根据key查找 从根节点开始找出相应的TreeNode,
final TreeNode<K,V> findTreeNode(int h, Object k, Class<?> kc) {
if (k != null) {
TreeNode<K,V> p = this;
do {
int ph, dir; K pk; TreeNode<K,V> q;
TreeNode<K,V> pl = p.left, pr = p.right;
if ((ph = p.hash) > h)
p = pl;
else if (ph < h)
p = pr;
else if ((pk = p.key) == k || (pk != null && k.equals(pk)))
return p;
else if (pl == null)
p = pr;
else if (pr == null)
p = pl;
else if ((kc != null ||
(kc = comparableClassFor(k)) != null) &&
(dir = compareComparables(kc, k, pk)) != 0)
p = (dir < 0) ? pl : pr;
else if ((q = pr.findTreeNode(h, k, kc)) != null)
return q;
else
p = pl;
} while (p != null);
}
return null;
}
}
ConcurrentHashMap的初始化
我们通过ConcurrentHashMap的构造方法可以看出,在构造方法中并没有做初始化的事。初始化放到了put操作中,这是和其它集合由区别的地方
put 操作过程
查看put 方法
/** Implementation for put and putIfAbsent */
final V putVal(K key, V value, boolean onlyIfAbsent) {
if (key == null || value == null) throw new NullPointerException();
int hash = spread(key.hashCode()); //两次hash,减少hash冲突,可以均匀分布
int binCount = 0;
for (Node<K,V>[] tab = table;;) { //对这个table进行迭代
Node<K,V> f; int n, i, fh;
//这里就是上面构造方法没有进行初始化,在这里进行判断,为null就调用initTable进行初始化,属于懒汉模式初始化
if (tab == null || (n = tab.length) == 0)
tab = initTable();
else if ((f = tabAt(tab, i = (n - 1) & hash)) == null) {//如果i位置没有数据,就直接无锁插入
if (casTabAt(tab, i, null,
new Node<K,V>(hash, key, value, null)))
break; // no lock when adding to empty bin
}
else if ((fh = f.hash) == MOVED)//如果在进行扩容,则先进行扩容操作
tab = helpTransfer(tab, f);
else {
V oldVal = null;
//如果以上条件都不满足,那就要进行加锁操作,也就是存在hash冲突,锁住链表或者红黑树的头结点
synchronized (f) {
if (tabAt(tab, i) == f) {
if (fh >= 0) { //表示该节点是链表结构
binCount = 1;
for (Node<K,V> e = f;; ++binCount) {
K ek;
//这里涉及到相同的key进行put就会覆盖原先的value
if (e.hash == hash &&
((ek = e.key) == key ||
(ek != null && key.equals(ek)))) {
oldVal = e.val;
if (!onlyIfAbsent)
e.val = value;
break;
}
Node<K,V> pred = e;
if ((e = e.next) == null) { //插入链表尾部
pred.next = new Node<K,V>(hash, key,
value, null);
break;
}
}
}
else if (f instanceof TreeBin) {//红黑树结构
Node<K,V> p;
binCount = 2;
//红黑树结构旋转插入
if ((p = ((TreeBin<K,V>)f).putTreeVal(hash, key,
value)) != null) {
oldVal = p.val;
if (!onlyIfAbsent)
p.val = value;
}
}
}
}
if (binCount != 0) { //如果链表的长度大于8时就会进行红黑树的转换
if (binCount >= TREEIFY_THRESHOLD)
treeifyBin(tab, i);
if (oldVal != null)
return oldVal;
break;
}
}
}
addCount(1L, binCount);//统计size,并且检查是否需要扩容
return null;
}
put 操作可以描述为以下过程
- 没有初始化就先调用initTable()方法初始化table数组
- 如果没有hash冲突就直接CAS插入
- 如果还在扩容就先进行扩容
- 如果存在hash冲突,就加锁来保证线程安全,这里有两种情况,一种是链表形式就直接遍历到尾端插入,一种是红黑树就按照红黑树结构插入
- 最后一个如果该链表的数量大于阈值8,就要先转换成黑红树的结构,
- 如果添加成功就调用addCount()方法统计size,并且检查是否需要扩容
initTable 方法
private final Node<K,V>[] initTable() {
Node<K,V>[] tab; int sc;
while ((tab = table) == null || tab.length == 0) {//空的table才能进入初始化操作
if ((sc = sizeCtl) < 0) //sizeCtl<0表示其他线程已经在初始化了或者扩容了,挂起当前线程
Thread.yield(); // lost initialization race; just spin
else if (U.compareAndSwapInt(this, SIZECTL, sc, -1)) {//CAS操作SIZECTL为-1,表示初始化状态
try {
if ((tab = table) == null || tab.length == 0) {
int n = (sc > 0) ? sc : DEFAULT_CAPACITY;
@SuppressWarnings("unchecked")
Node<K,V>[] nt = (Node<K,V>[])new Node<?,?>[n];//初始化
table = tab = nt;
sc = n - (n >>> 2);//记录下次扩容的大小
}
} finally {
sizeCtl = sc;
}
break;
}
}
return tab;
}
get 操作过程
ConcurrentHashMap的get操作的流程很简单,也很清晰,可以分为三个步骤来描述
- 计算hash值,定位到该table索引位置,如果是首节点符合就返回
- 如果遇到扩容的时候,会调用标志正在扩容节点ForwardingNode的find方法,查找该节点,匹配就返回
- 以上都不符合的话,就往下遍历节点,匹配就返回,否则最后就返回null
size 操作
public int size() {
long n = sumCount();
return ((n < 0L) ? 0 :
(n > (long)Integer.MAX_VALUE) ? Integer.MAX_VALUE :
(int)n);
}
final long sumCount() {
CounterCell[] as = counterCells; CounterCell a; //变化的数量
long sum = baseCount;
if (as != null) {
for (int i = 0; i < as.length; ++i) {
if ((a = as[i]) != null)
sum += a.value;
}
}
return sum;
}
总结
其实可以看出JDK1.8版本的ConcurrentHashMap的数据结构已经接近HashMap,相对而言,ConcurrentHashMap只是增加了同步的操作来控制并发,从JDK1.7版本的ReentrantLock+Segment+HashEntry,到JDK1.8版本中synchronized+CAS+HashEntry+红黑树
总结如下:
- JDK1.8的实现降低锁的粒度,JDK1.7版本锁的粒度是基于Segment的,包含多个HashEntry,而JDK1.8锁的粒度就是HashEntry(首节点)
- JDK1.8版本的数据结构变得更加简单,使得操作也更加清晰流畅,因为已经使用synchronized来进行同步,所以不需要分段锁的概念,也就不需要Segment这种数据结构了,由于粒度的降低,实现的复杂度也增加了
- JDK1.8使用红黑树来优化链表,基于长度很长的链表的遍历是一个很漫长的过程,而红黑树的遍历效率是很快的,代替一定阈值的链表,这样形成一个最佳拍档
ConcurrentHashMap怎么保证安全的的更多相关文章
- ConcurrentHashMap如何保证线程安全
以前看过HashMap的内部实现,知道HashMap是使用Node数组+链表+红黑树的数据结构来实现,如下图所示.但是HashMap是非线程安全,在多线程环境不能够使用. 不过JDK在其并发包中为我们 ...
- 并发读写缓存实现机制(一):为什么ConcurrentHashMap可以这么快?
大家都知道ConcurrentHashMap的并发读写速度很快,但为什么它会这么快?这主要归功于其内部数据结构和独特的hash运算以及分离锁的机制.做游戏性能很重要,为了提高数据的读写速度,方法之一就 ...
- Java并发系列[9]----ConcurrentHashMap源码分析
我们知道哈希表是一种非常高效的数据结构,设计优良的哈希函数可以使其上的增删改查操作达到O(1)级别.Java为我们提供了一个现成的哈希结构,那就是HashMap类,在前面的文章中我曾经介绍过HashM ...
- HashMap与ConcurrentHashMap、HashTable
(1)HashMap的线程不安全原因一:死循环 原因在于HashMap在多线程情况下,执行resize()进行扩容时容易造成死循环. 扩容思路为它要创建一个大小为原来两倍的数组,保证新的容量仍为2的N ...
- Java同步数据结构之ConcurrentHashMap
前言 这是Java并发包最后一个集合框架的数据结构,其复杂程度也较以往任何数据结构复杂的多,顾名思义ConcurrentHashMap是线程安全版本的HashMap,总所周知HashMap是非线程安全 ...
- Hashtable、HashMap、TreeMap、ConcurrentHashMap、ConcurrentSkipListMap区别
原创转载请注明出处:https://www.cnblogs.com/agilestyle/p/11444013.html 并发场景下的Map容器使用场景 如果对数据有强一致要求,则需使用Hashtab ...
- HashTable、HashMap与ConCurrentHashMap源码解读
HashMap 的数据结构 hashMap 初始的数据结构如下图所示,内部维护一个数组,然后数组上维护一个单链表,有个形象的比喻就是想挂钩一样,数组脚标一样的,一个一个的节点往下挂. 我们可以 ...
- Java 并发实践 — ConcurrentHashMap 与 CAS
转载 http://www.importnew.com/26035.html 最近在做接口限流时涉及到了一个有意思问题,牵扯出了关于concurrentHashMap的一些用法,以及CAS的一些概念. ...
- 助力面试之ConcurrentHashMap面试灵魂拷问,你能扛多久
目录 前言 ConcurrentHashMap 原理 JDK1.8 版本 ConcurrentHashMap 做了什么改进 为什么 key 和 value 不允许为 null ConcurrentHa ...
随机推荐
- 详解nohup /dev/null 2>&1 含义的使用
https://www.jb51.net/article/169837.htm 这篇文章主要介绍了详解nohup /dev/null 2>&1 含义的使用,文中通过示例代码介绍的非常详细 ...
- Linux命令--ss命令的参数及使用详解
ss是Socket Statistics的缩写.顾名思义,ss命令可以用来获取socket统计信息,它可以显示和netstat类似的内容.但ss的优势在于它能够显示更多更详细的有关TCP和连接状态的信 ...
- Java的JDBC
第一个JDBC程序 创建测试数据库 CREATE DATABASE jdbcStudy CHARACTER SET utf8 COLLATE utf8_general_ci; USE jdbcStud ...
- vscode设置vue结构的初始代码片段
{ "Print to console": { "prefix": "vue", "body": [ "< ...
- 【Java】单例设计模式
文章目录 单例设计模式 什么是设计模式 单例设计模式 实现 饿汉式 懒汉式 饿汉式与懒汉式的区别 饿汉式 懒汉式 单例模式的应用场景 单例设计模式 什么是设计模式 设计模式是在大量的实践中总结和理论化 ...
- python实现--九九乘法表
1 for i in range(1,10): 2 for j in range(1,i+1): 3 print("%d*%d=%d"%(j,i,j*i),end="\t ...
- 通过UI库深入了解Vue的插槽的使用技巧
Vue官网对于插槽的介绍比较简略,插槽本身也比较"烧脑",很容易看晕,我就一直没看懂,直到 使用了element-plus的组件的插槽. 其实我们可以换一个角度来理解插槽,就会豁然 ...
- 【reverse】逆向5 标志寄存器
[reverse]逆向5 标志寄存器 1.引言 通过一个creak.exe文件的爆破,引出现阶段需要学习的知识 2.标志寄存器 标志寄存器有上图这么多个 记住这几个寄存器的位置和名称 下面是6个状态标 ...
- openssl基本原理 + 生成证书(转)
https://blog.csdn.net/cpcpcp123/article/details/108885922 https://liruzhen.blog.csdn.net/article/det ...
- CSS基本语法(二)
目录 CSS基本语法(二) 八.CSS复合选择器 1.后代选择器** 2.子选择器 3.并集选择器** 4.伪类选择器 链接伪类选择器 :focus伪类选择器 总结 九.CSS的元素显示样式 1.概念 ...