MobileNet系列之MobileNet_v2
Inception系列之Batch Normalization
导言:
MobileNet_v2提出了一些MobileNet_v1存在的一些问题,并在此基础上提出了改进方案。其主要贡献为提出了线性瓶颈(Linear Bottlenecks)和倒残差(Inverted Residuals)。
关注公众号CV技术指南,及时获取更多计算机视觉技术总结文章。
01Linear Bottlenecks


如上图所示,MobileNet_v2提出ReLU会破坏在低维空间的数据,而高维空间影响比较少。因此,在低维空间使用Linear activation代替ReLU。如下图所示,经过实验表明,在低维空间使用linear layer是相当有用的,因为它能避免非线性破坏太多信息。

此外,如果输出是流形的非零空间,则使用ReLU相当于是做了线性变换,将无法实现空间映射,因此MobileNet_v2使用ReLU6实现非零空间的非线性激活。
上方提出使用ReLU会破坏信息,这里提出ReLU6实现非零空间的非线性激活。看起来有些难以理解。这里提出我自己的理解。
根据流形学习的观点,认为我们所观察到的数据实际上是由一个低维流形映射到高维空间的。由于数据内部特征的限制,一些高维中的数据会产生维度上的冗余,实际上这些数据只要比较低的维度的维度就能唯一的表示。

图像分布是在高维空间,神经网络中使用非线性激活函数实现将高维空间映射回低维流形空间。而这里提出使用ReLU6即增加了神经网络对非零空间的映射,否则,在非零空间使用ReLU相当于线性变换,无法映射回流形低维空间。而前文提出的使用线性激活函数来代替ReLU是在已经映射后的流形低维空间。
区别就是ReLU6是在将高维空间映射到流形低维空间时使用,Linear layer是在映射后的流形低维空间中使用。
其使用的如下表所示


02 Inverted Residuals
MobileNet_v1中的结构如下左图,MobileNet_v2如下右图。、
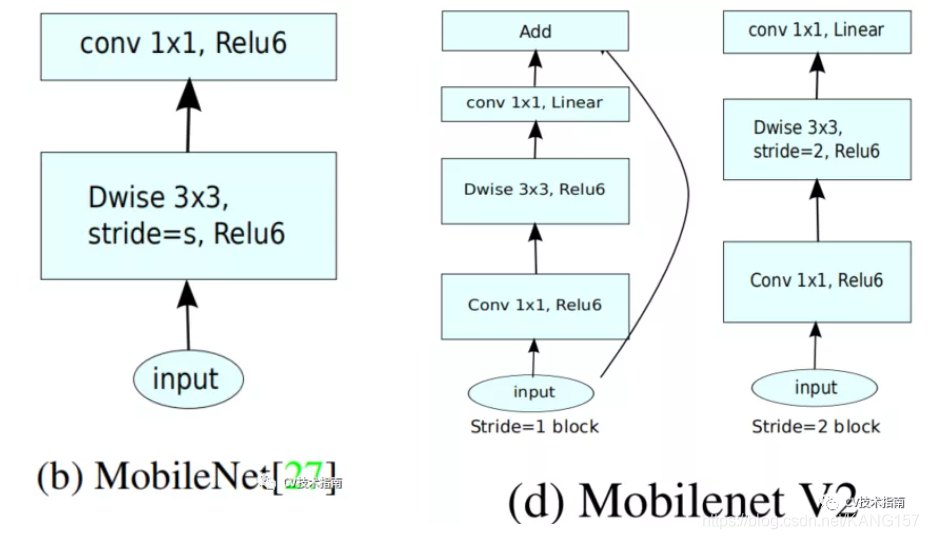
MobileNet_v2是在2018年发表的,此时ResNet已经出来了,经过几年的广泛使用表明,shortcut connection和Bottlenck residual block是相当有用的。MobileNet_v2中加入了这两个结构。

但不同的是,ResNet中的bottleneck residual是沙漏形的,即在经过1x1卷积层时降维,而MobileNet_v2中是纺锤形的,在1x1卷积层是升维。这是因为MobileNet使用了Depth wise,参数量已经极少,如果使用降维,泛化能力将不足。
此外,在MobileNet_v2中没有使用池化来降维,而是使用了步长为2的卷积来实现降维,此外如上图所示,步长为2的block没有使用shortcut connection。

这里的t是膨胀因子,取6。
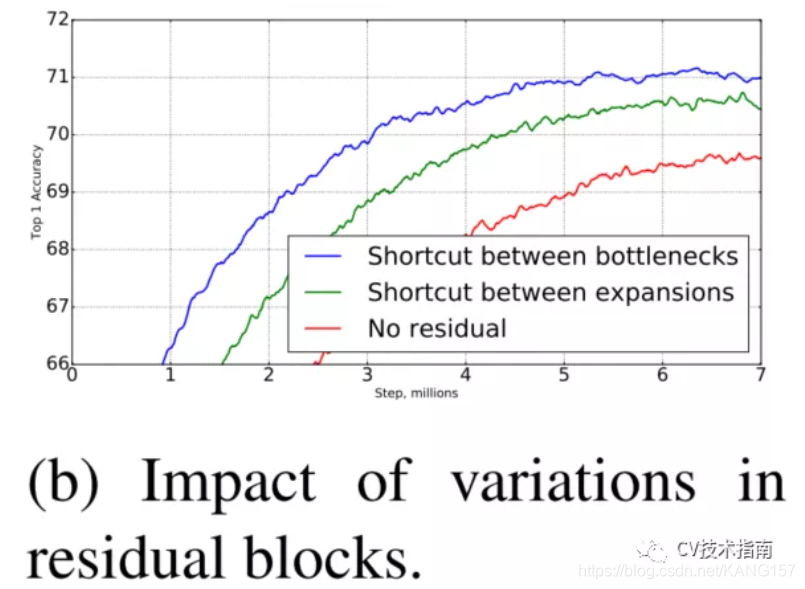
Inverted residuals block 与ResNet中的residuals block对比如下图所示:

图来源于网络
ResNet中residual block是两端大,中间小。而MobileNet_v2是中间大,两端小,刚好相反,作者把它取名为Inverted residual block。
整体结构如下图所示:

论文里提到Bottleneck有19层,但其给出的结构图中却只有17层。
MobileNet_v2相比与MobileNet_v1,参数量有所增加,主要增加在于Depth wise前使用1x1升维。此外,在CPU上的推理速度也比后者慢,但精度更高。

本文来源于公众号 CV技术指南 的模型解读系列。
欢迎关注公众号 CV技术指南 ,专注于计算机视觉的技术总结、最新技术跟踪、经典论文解读。
在公众号中回复关键字 “技术总结” 可获取以下文章的汇总pdf。

其它文章
MobileNet系列之MobileNet_v2的更多相关文章
- MobileNet系列
最近一段时间,重新研读了谷歌的mobilenet系列,对该系列有新的认识. 1.MobileNet V1 这篇论文是谷歌在2017年提出了,专注于移动端或者嵌入式设备中的轻量级CNN网络.该论文最大的 ...
- 卷积神经网络学习笔记——轻量化网络MobileNet系列(V1,V2,V3)
完整代码及其数据,请移步小编的GitHub地址 传送门:请点击我 如果点击有误:https://github.com/LeBron-Jian/DeepLearningNote 这里结合网络的资料和Mo ...
- 轻量化模型之MobileNet系列
自 2012 年 AlexNet 以来,卷积神经网络在图像分类.目标检测.语义分割等领域获得广泛应用.随着性能要求越来越高,AlexNet 已经无法满足大家的需求,于是乎各路大牛纷纷提出性能更优越的 ...
- 计算机视觉--CV技术指南文章汇总
前言 本文汇总了过去本公众号原创的.国外博客翻译的.从其它公众号转载的.从知乎转载的等一些比较重要的文章,并按照论文分享.技术总结三个方面进行了一个简单分类.点击每篇文章标题可阅读详细内容 欢迎关注 ...
- MovibleNet
MobileNet MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications MobileN ...
- MobileNetV1/V2/V3简述 | 轻量级网络
MobileNet系列很重要的轻量级网络家族,出自谷歌,MobileNetV1使用深度可分离卷积来构建轻量级网络,MobileNetV2提出创新的inverted residual with line ...
- 深度学习论文翻译解析(十九):Searching for MobileNetV3
论文标题:Searching for MobileNetV3 论文作者:Andrew Howard, Mark Sandler, Grace Chu, Liang-Chieh Chen, Bo Che ...
- CNN结构演变总结(一)经典模型
导言: 自2012年AlexNet在ImageNet比赛上获得冠军,卷积神经网络逐渐取代传统算法成为了处理计算机视觉任务的核心. 在这几年,研究人员从提升特征提取能力,改进回传梯度更新效果 ...
- 旷视MegEngine核心技术升级
旷视MegEngine核心技术升级 7 月 11 日,旷视研究院在 2020 WAIC · 开发者日「深度学习框架与技术生态论坛」上围绕 6 月底发布的天元深度学习框架(MegEngine)Beta ...
随机推荐
- Java集合详解(五):Hashtable原理解析
概述 本文是基于jdk8_271版本进行分析的. Hashtable与HashMap一样,是一个存储key-value的双列集合.底层是基于数组+链表实现的,没有红黑树结构.Hashtable默认初始 ...
- [Java] Structs
背景 基于MVC的WEB框架 在表示层过滤访问请求并处理 步骤 在eclipse中创建Web动态项目 导入相关jar包到WEB-INF/lib 在WEB-INF目录下新建web.xml,配置Filte ...
- SPEC CPU2006的安装和使用
https://www.spec.org/download.html http://blog.lazzzy.xyz/2017/09/15/SPEC_CPU2006/ BenchMark SPEC CP ...
- zabbix监控之邮件报警通知
zabbix官网的操作指南:https://www.zabbix.com/documentation/4.0/zh/manual 首先我们需要创建一个需要被监控的主机,并设置相应的监控项.当监控项收集 ...
- mysql基础之mariadb库管理和表管理语句
一.数据库管理语句 1.Syntax: CREATE {DATABASE | SCHEMA} [IF NOT EXISTS] db_name [create_specification] ... cr ...
- 关于lua闭包导致引用无法释放内存泄露
最近项目存在严重的内存泄漏问题,每次切level 会增加20M无法释放的内存,翻遍了项目用了多个工具,查询资料等 发现项目中两种存在内存泄露的情况 1.lua闭包的不当使用,对比包的引用要及时 释放. ...
- Cisco Catalyst 9800-CL Wireless Controller for Cloud
面向云的思科 Catalyst 9800-CL 无线控制器,专为基于意图的网络全新打造. 版本: C9800-CL-universalk9.17.04.01 (29-Nov-2020) C9800-C ...
- 郑政 | 2021软件代码开发技术作业四 | 需求改进&系统设计
需求改进&系统设计 -------------------------------------------------------------------------------------- ...
- [LeetCode] 231. 2 的幂
位运算 231. 2 的幂 ``` class Solution { public boolean isPowerOfTwo(int n) { int cnt = 0; while (n>0) ...
- python解析ua
一个非常神奇的包可以帮助我们优雅的解析浏览器的UA,他的名字叫做user_agents pip install pyyaml ua-parser user-agents >>>ua_ ...