树莓派小车By 树莓派爱好者ITJoker(通过python socket通信实现树莓派视频小车)(一)
本文由树莓派爱好者ITJoker 编辑,转载请注明出处。本人也有新浪博客同样是树莓派爱好者ITJoker
sudo nano start.py
然后Ctrl+x再输入Y加回车即可。
再然后我们继续执行下列命令!
sudo nano csb.py
输入命令:
sudo python start.py
即可运行!
 )
)###########################################
#Writer: ITJoker #
#Time: 2018.3.10 #
#Version:2.0 #
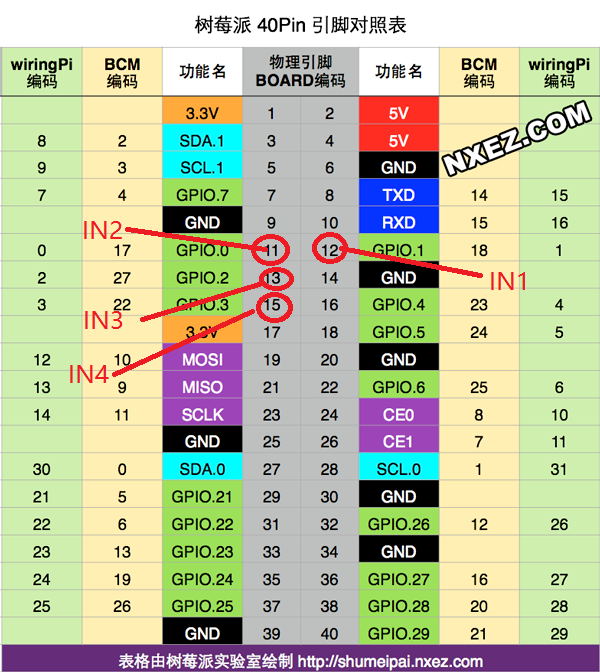
#Trig=GPIO 2 #
#Echo=GPIO 3 #
###########################################
# -*- coding: utf-8 -*-
import RPi.GPIO as GPIO
from socket import *
import csb
import time
def t_init():
GPIO.setmode(GPIO.BOARD)
GPIO.setwarnings(False)
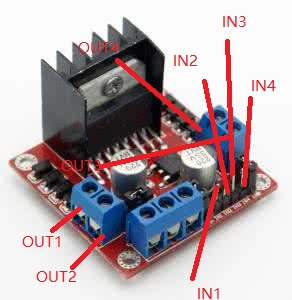
GPIO.setup(11,GPIO.OUT)
GPIO.setup(12,GPIO.OUT)
GPIO.setup(13,GPIO.OUT)
GPIO.setup(15,GPIO.OUT)
def chaoshenbo():
csb.setup()
a=csb.checkdist()
GPIO.cleanup()
conn.send(str(a))
def t_stop():
GPIO.output(11, False)
GPIO.output(12, False)
GPIO.output(13, False)
GPIO.output(15, False)
GPIO.output(3, False)
GPIO.output(2, False)
time.sleep(1)
GPIO.cleanup()
def t_up():
t_init()
GPIO.output(11, True)
GPIO.output(12, False)
GPIO.output(13, True)
GPIO.output(15, False)
time.sleep(1)
GPIO.cleanup()
chaoshenbo()
def t_down():
t_init()
GPIO.output(11, False)
GPIO.output(12, True)
GPIO.output(13, False)
GPIO.output(15, True)
time.sleep(1)
GPIO.cleanup()
chaoshenbo()
def t_right():
t_init()
GPIO.output(11, False)
GPIO.output(12, True)
GPIO.output(13, True)
GPIO.output(15, False)
time.sleep(1)
GPIO.cleanup()
chaoshenbo()
def t_left():
t_init()
GPIO.output(11, True)
GPIO.output(12, False)
GPIO.output(13, False)
GPIO.output(15, True)
time.sleep(1)
GPIO.cleanup()
chaoshenbo()
#########################################################
def commands (cmd):
print cmd
if cmd == 'd':
t_down()
elif cmd == 's':
t_stop()
elif cmd == 'u':
t_up()
elif cmd == 'l':
t_left()
elif cmd == 'r':
t_right()
HOST ='192.168.43.97' #the ip of raspberry pi
PORT =8888 #the port of raspberry pi
s= socket(AF_INET, SOCK_STREAM)
s.bind((HOST, PORT))
s.listen(5)
print ('listening on',PORT)
while 1:
conn, addr = s.accept()
print ('Connected ok! By ',addr)
while 1:
command= conn.recv(20).replace('\n','')
if command == 'g':
conn.close
break
elif not command:break
commands(bytearray(command)) #command
conn.close()
csb.py
#! /usr/bin/python
# -*- coding:utf-8 -*-
import RPi.GPIO as GPIO
import time
def checkdist():
#发出触发信号
GPIO.output(2,GPIO.HIGH)
#保持10us以上
time.sleep(0.000015)
GPIO.output(2,GPIO.LOW)
while not GPIO.input(3):
pass
#发现高电平时开时计时
t1 = time.time()
while GPIO.input(3):
pass
#高电平结束停止计时
t2 = time.time()
#返回距离,单位为米
return (t2-t1)*340/2
def setup():
GPIO.setmode(GPIO.BCM)
GPIO.setup(2,GPIO.OUT,initial=GPIO.LOW)
GPIO.setup(3,GPIO.IN)
time.sleep(2)
树莓派小车By 树莓派爱好者ITJoker(通过python socket通信实现树莓派视频小车)(一)的更多相关文章
- Python Socket通信原理
[Python之旅]第五篇(一):Python Socket通信原理 python Socket 通信理论 socket例子 摘要: 只要和网络服务涉及的,就离不开Socket以及Socket编 ...
- python - socket通信笔记
参考: 通过编写聊天程序来熟悉python中多线程和socket的用法:https://www.cnblogs.com/mingjiatang/p/4905395.html python socket ...
- 树莓派小车By 树莓派爱好者ITJoker(通过C socket通信实现树莓派视频小车)(二)
前面的方法可以参照(一)来配置GPIO口. 下面是代码...仅供参考,转载请注明出处. 1. 先输入以下指令,再复制代码,Ctrl+X 输入Y 回车 保存. sudo nano start.c ...
- Python Socket通信黏包问题分析及解决方法
参考:http://www.cnblogs.com/Eva-J/articles/8244551.html#_label5 1.黏包的表现(以客户端远程操作服务端命令为例) 注:只有在TCP协议通信的 ...
- Python Socket通信例子
一.TCP 通信 服务端 #!/usr/bin/env python # -*- coding: utf-8 -*- # server_tcp.py import socket so = socket ...
- Python Socket 通信
参考: http://www.cnblogs.com/alex3714/articles/5830365.html Socket A network socket is an endpoint of ...
- 程序媛计划——python socket通信
定义 socket 是进程间的一种通信方式,可以实现不同主机间的数据传输 #写服务期端程序server.py #实现服务器向客户端连接 #!/usr/bin/env python #coding:ut ...
- Python socket通信之FTP
Python中利用socket进行server端和client端通信是网络编程的基础,是最简单的传输范例. (懂网络的请自动跳过这一部分) 首先,要想通信,必须建立连接,建立连接的过程,需要clien ...
- Python socket 通信功能简介
常用的地址家族AF_UNIX:基于文件,实现同一主机不同进程之间的通信AF_INET:基于网络,适用于IPv4AF_INET6:基于网络,使用于IPv6 常见的连接类型SOCK_STREAM:即TCP ...
随机推荐
- 咫尺论坛|即速应用-微信小程序社区
咫尺论坛|即速应用-微信小程序社区 是一个集微信和支付宝小程序行业资讯.开发资源.技术交流于一身的大型小程序开发论坛,成立伊始便迅速聚集了一大批小程序开发爱好者,短时间内成为了国内领先的小程序开发者社 ...
- Codeforces 888E Maximum Subsequence
原题传送门 E. Maximum Subsequence time limit per test 1 second memory limit per test 256 megabytes input ...
- KinectFusion解析
三维重建是指获取真实物体的三维外观形貌,并建立可复用模型的一种技术.它是当下计算机视觉的一个研究热点,主要有三方面的用途:1)相比于二维图像,可以获取更全面的几何信息:2)在VR/AR中,建立真实 ...
- 浅析ASCII、Unicode和UTF-8三种常见字符编码
什么是字符编码? 计算机只能处理数字,如果要处理文本,就必须先把文本转换为数字才能处理.最早的计算机在设计时采用8个比特(bit)作为一个字节(byte),所以,一个字节能表示的最大的整数就是255( ...
- BZOJ 3211: 花神游历各国【线段树区间开方问题】
3211: 花神游历各国 Time Limit: 5 Sec Memory Limit: 128 MBSubmit: 3514 Solved: 1306[Submit][Status][Discu ...
- DFS中的奇偶剪枝学习笔记
奇偶剪枝学习笔记 描述 编辑 现假设起点为(sx,sy),终点为(ex,ey),给定t步恰好走到终点, s | | | + — — — e 如图所示(“|”竖走,“—”横走,“+”转弯),易证abs( ...
- 二维字符数组利用gets输入
char a[10][81];for(int i=0;i<10;i++)gets(a[i]); a是二维数组的数组名,相当于一维数组的指针,所以a[i]就相当于指向第i个数组的指针,类型就相当于 ...
- hdu_4497GCD and LCM(合数分解)
题目链接:http://acm.hdu.edu.cn/showproblem.php?pid=4497 GCD and LCM Time Limit: 2000/1000 MS (Java/Other ...
- Linux 权限、磁盘操作命令-Linux基础环境命令学习笔记
1.创建用户和用户组 1)用户和用户组 /etc/passwd 保存系统用户的基本信息 /etc/group 保存用户组信息 用户名:x:UID:GID 2)基本命令 useradd 增加用户 gro ...
- gulp + es6 + babel+ angular 搭建环境并实现简单的路由
1.ECMAscript 6的语法糖面临的唯一问题就是浏览器兼容的问题,使得很多程序员望而怯步. 2.babel的作用就是将es6的语法编译成es5被浏览器所识别.这样就可以任性的使用es6了. 3. ...