SLAM+语音机器人DIY系列:(四)差分底盘设计——1.stm32主控硬件设计
摘要
运动底盘是移动机器人的重要组成部分,不像激光雷达、IMU、麦克风、音响、摄像头这些通用部件可以直接买到,很难买到通用的底盘。一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的;另一方面是因为底盘包含软硬件整套解决方案,是很多机器人公司的核心技术,一般不会随便公开。出于强烈的求知欲与学习热情,我想自己DIY一整套两轮差分底盘,并且将完整的设计过程公开出去供大家学习。说干就干,本章节主要内容:
1.stm32主控硬件设计
完整的stm32主控硬件包括:带霍尔编码器的直流减速电机、电机驱动、stm32单片机开发板等配件。
1.1.带霍尔编码器的直流减速电机
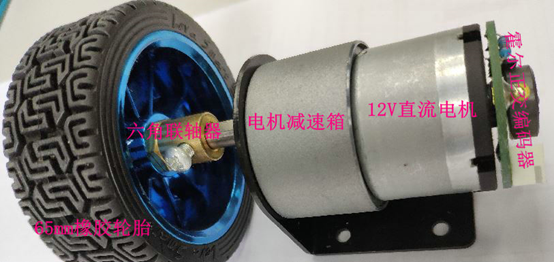
(图1)带霍尔编码器的直流减速电机
要制作一台机器人底盘,需要一套完整的电机部件,就如图1中看到的一样,需要有轮胎、联轴器、减速箱、电机和编码器,具体选型可以参考这几个方面的因素:
轮胎:直径越大,小车的越障能力越好,但会降低小车爬坡的马力;
联轴器:选择跟轮胎与电机输出轴尺寸相匹配的型号;
减速箱:减速比决定电机输出轴的扭矩,减速比越大,输出轴扭矩越大,但输出轴转速越慢;
电机:一般是12V的电机,直流有刷简单易控制;
编码器:一般为增量式正交编码器,编码线数根据实际需要精度进行选择。

(图2)电机接线端口
如图2,可以清楚的看到电机的接线端口,其实电路板上也是有丝印标注的。接线分为两类,一类是电机控制(电机线+、电机线-),另一类是编码器(编码器5V、编码器A相、编码器B相、编码器GND)。
1.2.电机驱动电路

(图3)TB6612FNG电机驱动
了解了电机的构造知识后,就来介绍一下如何将电机驱动起来。如图3所示,TB6612FNG是很流行的一款电机驱动芯片,相比于传统的L298N效率上提升很多,而且体积大幅减小。TB6612FNG是双驱动,也就是可以驱动两个电机;TB6612FNG每通道输出最高1.2 A的连续驱动电流,启动峰值电流达2A/3.2 A(连续脉冲/单脉冲);4种电机控制模式:正转/反转/制动/停止;PWM支持频率高达100 kHz。
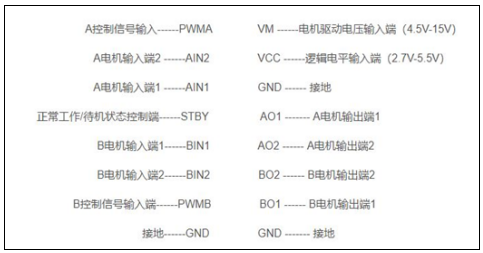
(图4)TB6612FNG引脚定义
TB6612FNG的引脚定义,如图4所示,引脚分为电源脚、控制输入脚、控制输出脚。
VM:为电机驱动电压,根据实际电机额定电压选择,推荐使用12V供电;
VCC:逻辑电源供电,推荐使用5V供电;
STBY:待机/工作状态切换,低电平待机,高电平工作;
PWMA:A端口电机PWM调速信号输入;
AIN1和AIN2:A电机转向控制信号输入;
PWMB:B端口电机PWM调速信号输入;
BIN1和BIN2:B电机转向控制信号输入;
AO1和AO2:A端口电机驱动信号输出;
BO1和BO2:B端口电机驱动信号输出。

(图5)TB6612FNG控制信号真值表
最后,我们来看一下控制信号的逻辑真值表,如图5,输入由单片机IO口给定,再结合PWM信号,便可以实现对电机的正/反转和调速控制了。由于两路电机控制是一模一样的,所以另一路控制信号的逻辑真值表就不重复赘述了。
1.3.霍尔正交编码器原理
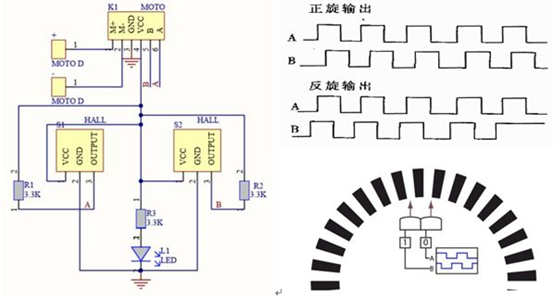
(图6)霍尔正交编码器原理
如果两个信号相位相差90度,则这两个信号称为正交。由于两个信号相位相差90度,因此可以根据两个信号哪个先哪个后来判断方向。利用单片机的IO口对编码器的A、B相进行捕获,很容易得到电机的转速和转向。霍尔正交编码器原理,如图6。
1.4.stm32单片机最小系统
stm32单片机常用的型号是stm32f103,根据具体需求的Flash容量、RAM容量、IO口数量进行选择,下面是常用的一些型号参数对比,如图7。

(图7)stm32f103系列单片机参数对比
考虑到stm32主控只是用于两个电机的控制,资源开销不算大,需要用到的IO口也不是很多,定时器资源也不多,出于性价比考虑推荐stm32f103c8t6这个型号。

(图8)stm32f103f103c8t6最小系统板
如图8所示,stm32f103c8t6最小系统板比较简洁,控制两个电动机,只需要用两个IO口输出2路PWM分别给两个电机调速,用4个IO口分别控制两个电机的方向,另外4个IO口分别接两个电机的正交编码器输入,UART1与UART2跟上位机连接分别用于程序debug与上层指令控制。
1.5.stm32主控硬件整体框图
第一个版本的硬件电路是用飞线连接的各个模块,电路稳定性很差,而且外观极其丑陋。痛定思痛,决心老老实实设计电路板,把各模块集成到一个板子上,经过两次改板打样,终于成功了。如图9,板子简洁美观,而且接插端子布局合理,符合我一向严苛的标准。
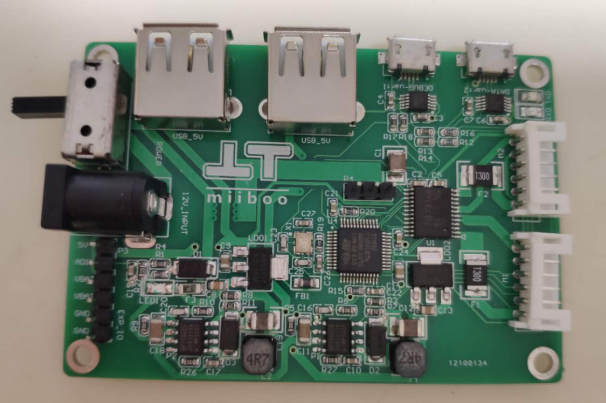
(图9)stm32主控电路板
好了,有了这个电路板就好办多了。针对这个电路板,讲讲我的设计思路吧。首先需要设计一个电源系统,用于单片机供电、电机供电、外部设备供电,同时还要考虑电源反接、过压、短路等保护;然后需要设计一个stm32单片机最小系统电路;最后围绕stm32最小系统,需要设计电机驱动、UART转USB、编码器信号捕获这些外围电路,同时还要考虑电机堵转保护、电机对系统电源干扰等问题。逐一采坑之后,差不多就完成设计了。stm32主控硬件整体框图,如图10。
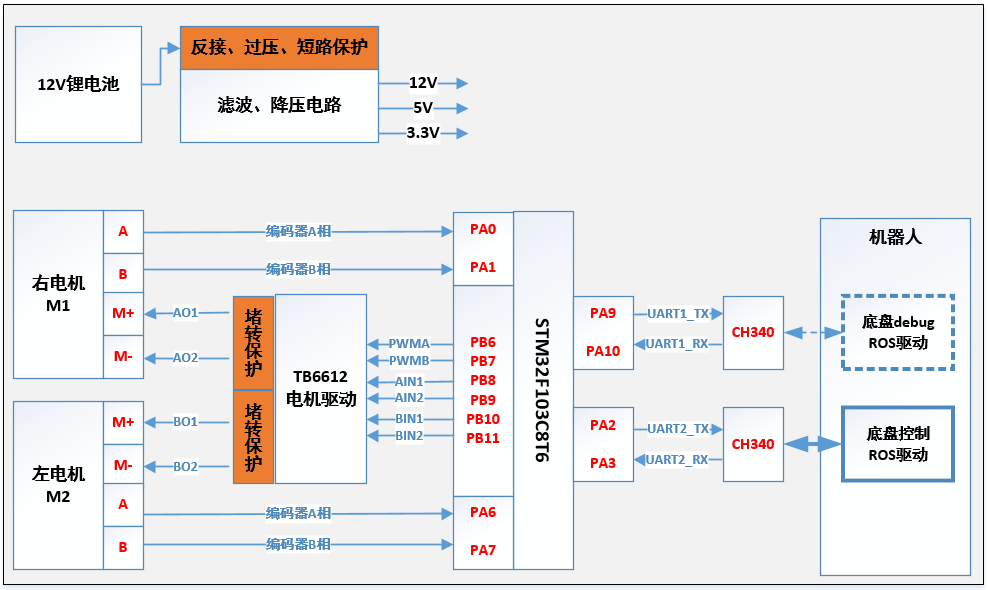
(图10)stm32主控硬件整体框图
后记
------SLAM+语音机器人DIY系列【目录】快速导览------
第1章:Linux基础
第2章:ROS入门
第3章:感知与大脑
第4章:差分底盘设计
第5章:树莓派3开发环境搭建
第6章:SLAM建图与自主避障导航
2.google-cartographer机器人SLAM建图
第7章:语音交互与自然语言处理
第8章:高阶拓展
2.centos7下部署Django(nginx+uwsgi+django+python3)
----------------文章将持续更新,敬请关注-----------------
如果大家对博文的相关类容感兴趣,或有什么技术疑问,欢迎加入下面的《SLAM+语音机器人DIY》QQ技术交流群,一起讨论学习^_^

SLAM+语音机器人DIY系列:(四)差分底盘设计——1.stm32主控硬件设计的更多相关文章
- SLAM+语音机器人DIY系列:(四)差分底盘设计——6.底盘里程计标
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达.IMU.麦克风.音响.摄像头这些通用部件可以直接买到,很难买到通用的底盘.一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的:另一方面是因为 ...
- SLAM+语音机器人DIY系列:(四)差分底盘设计——2.stm32主控软件设计
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达.IMU.麦克风.音响.摄像头这些通用部件可以直接买到,很难买到通用的底盘.一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的:另一方面是因为 ...
- SLAM+语音机器人DIY系列:(四)差分底盘设计——3.底盘通信协议
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达.IMU.麦克风.音响.摄像头这些通用部件可以直接买到,很难买到通用的底盘.一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的:另一方面是因为 ...
- SLAM+语音机器人DIY系列:(四)差分底盘设计——4.底盘ROS驱动开发
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达.IMU.麦克风.音响.摄像头这些通用部件可以直接买到,很难买到通用的底盘.一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的:另一方面是因为 ...
- SLAM+语音机器人DIY系列:(四)差分底盘设计——5.底盘PID控制参数整定
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达.IMU.麦克风.音响.摄像头这些通用部件可以直接买到,很难买到通用的底盘.一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的:另一方面是因为 ...
- SLAM+语音机器人DIY系列:(二)ROS入门——1.ROS是什么
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(三)感知与大脑——4.音响麦克风与摄像头
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话.朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人.实现的关键是让机器人能通过传感器感知周围环境,并通过 ...
- SLAM+语音机器人DIY系列:(三)感知与大脑——5.机器人大脑嵌入式主板性能对比
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话.朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人.实现的关键是让机器人能通过传感器感知周围环境,并通过 ...
- SLAM+语音机器人DIY系列:(三)感知与大脑——6.做一个能走路和对话的机器人
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话.朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人.实现的关键是让机器人能通过传感器感知周围环境,并通过 ...
随机推荐
- jdk源码剖析一:OpenJDK-Hotspot源码包目录结构
开启正文之前,先说一下源码剖析这一系列,就以“死磕到底”的精神贯彻始终,JDK-->JRE-->JVM(以openJDK代替) 最近想看看JDK8源码,但JDK中JVM(安装在本地C:\P ...
- 虚拟机console基础环境配置——sshd安全登陆
1. 概述2. 配置console的登陆2.1 配置sshd服务2.2 重启sshd服务2.3 无法登陆的问题解决3. 配置密钥登陆3.1 上传公钥的方式3.2 下载密码的方式3.3 虚拟机和宿主机共 ...
- nodejs-5.2 axios请求
1.npm官方文档:https://www.npmjs.com/package/axios 2.axios:用于 浏览器 和 node.js的基于Promise的HTTP客户端 请求 特征 从浏览器制 ...
- mysql输入中文出现ERROR 1366
MySQL输入中文出现如下错误: ERROR 1366: 1366: Incorrect string value: '\xE6\xB0\xB4\xE7\x94\xB5...' for column ...
- 【重学计算机】操作系统D3章:存储管理
1. 存储管理的基本概念 逻辑地址:用户地址,从零开始编号 一维逻辑地址:(地址) 二维逻辑地址:(段号: 段内地址) 主存储器的复用方式 按分区:主存划分为多个固定/可变分区,一个程序占一个分区 按 ...
- redis一致性hash算法理解
一般算法: 对对象先hash然后对redis数量取模,如果结果是0就存在0的节点上. 1.2同上,假设有0-3四个redis节点.20个数据: 进行取模后分布如下: 现在因为压力过大需要扩容,增加一台 ...
- Vuex的初探与实战
1.背景 最近在做一个单页面的管理后台项目,为了提高开发效率,使用了Vue框架来开发.为了使各个部分的功能,独立结构更加清晰,于是就拆分了很多组件,但是组件与组件之间数据共享成了一个问题,父子组件实现 ...
- Spring Boot入门(五):使用JDBC访问MySql数据库
本系列博客记录自己学习Spring Boot的历程,如帮助到你,不胜荣幸,如有错误,欢迎指正! 在程序开发的过程中,操作数据库是必不可少的部分,前面几篇博客中,也一直未涉及到数据库的操作,本篇博客 就 ...
- android事件分发源码分析—笔记
昨天晚上从源码角度复习了一下android的事件分发机制,今天将笔记整理下放在网上.其实说复习,也是按着<android开发艺术探索>这本书作者的思路做的笔记. 目录 事件是如何从Acti ...
- Shell编程(week4_day5)--技术流ken
本节内容 1. 三剑客简介 2. sed命令详解 3. awk命令详解 文本处理三剑客 在 Shell 下使用这些正则表达式处理文本最多的命令有下面几个工具: 命令 描述 ...