ORCA避障源码笔记
参考资料
https://gamma.cs.unc.edu/ORCA/publications/ORCA.pdf
https://gamma.cs.unc.edu/RVO2/
数学知识
1.向量的点乘 dotProduct,计算方法:1. 2.
2. ,
,
作用:点积如果为负,则a,b形成的角为钝角;如果为零,那么a,b垂直;如果为正,那么a,b形成的角为锐角
2.向量a,向量b,det(a,b)表示行列式的值,计算方法x1y2 - x2y1,同时也是叉乘的值
作用:1.以两个向量为邻边的平行四边形的有向面积,2.小于0表示b在a的顺时针方向,大于0表示b在a逆时针方向,等于0表示a,b平行
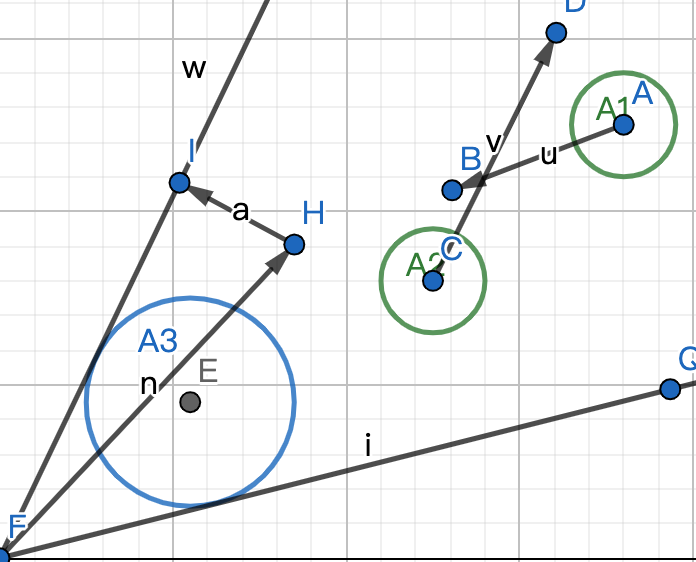
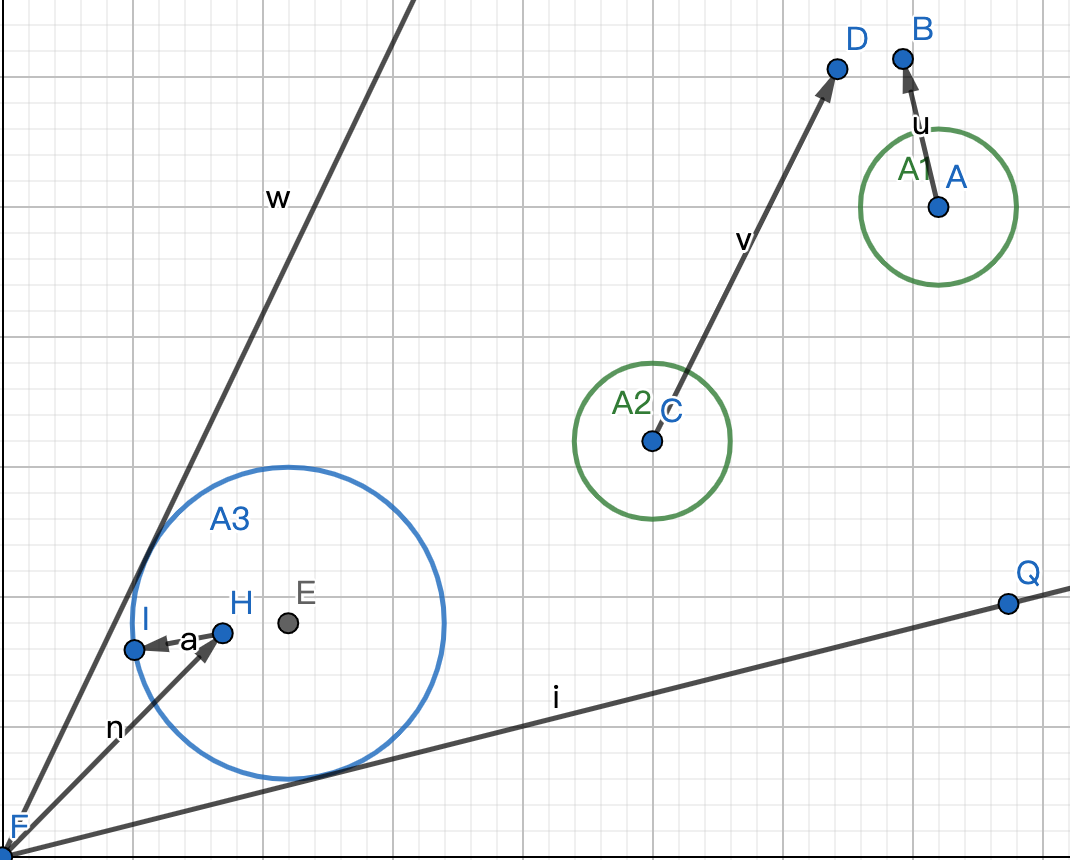
下图是碰撞需要修正,并且保证最短修正的两种情况,
1) 将速度修正到切线上
2) 将速度修正到圆
1,
final double dotProduct1 = w.dotProduct(relativePosition);
dotProduct1 < 0.0 && dotProduct1 * dotProduct1 > combinedRadiusSq * wLengthSq
这个代码是为了判断当前是哪种情况,
向量w = 相对速度 - 相对位置
dotProduct1小于0,表示向量w与相对位置的夹角为钝角,即AE与AO的角为锐角(需要先判断这个,只有锐角范围内cos单调递减)
dotProduct1 * dotProduct1 > combinedRadiusSq * wLengthSq,角OAE小于角OAD
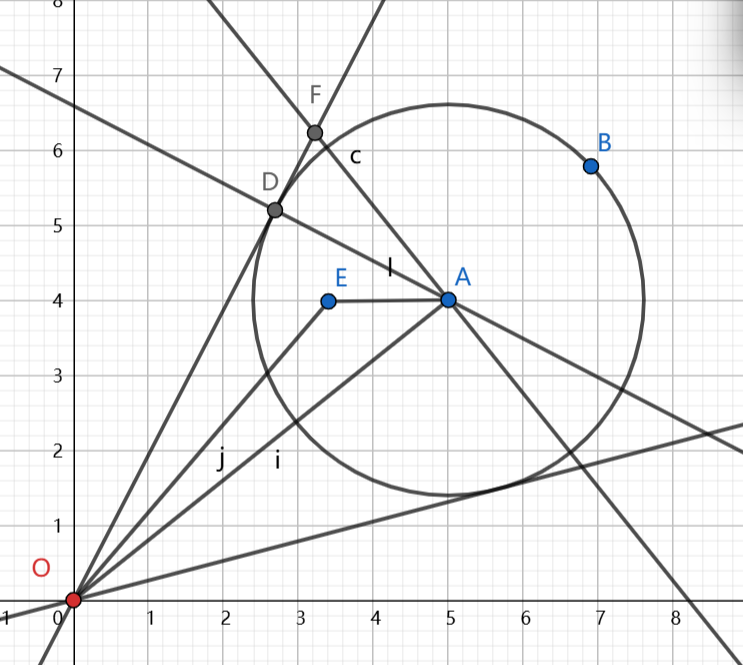
推导:
cos在0-90单调递减
角OAE < 角OAD
=> cosOAE > cosOAD
=> OA*cosOAE > OA*cosOAD (同时乘以OA)
=> OA*cosOAE > AD (OA*cosOAD = AD)
=> OA * AE * cosOAE > AE * AD (同时乘以AE)
=> dotProduct1 * dotProduct1 > combinedRadiusSq * wLengthSq
2
direction = new Vector2D(relativePosition.getX() * leg - relativePosition.getY() * combinedRadius, relativePosition.getX() * combinedRadius + relativePosition.getY() * leg)
这段代码为了计算第一情况,修正速度的落点,
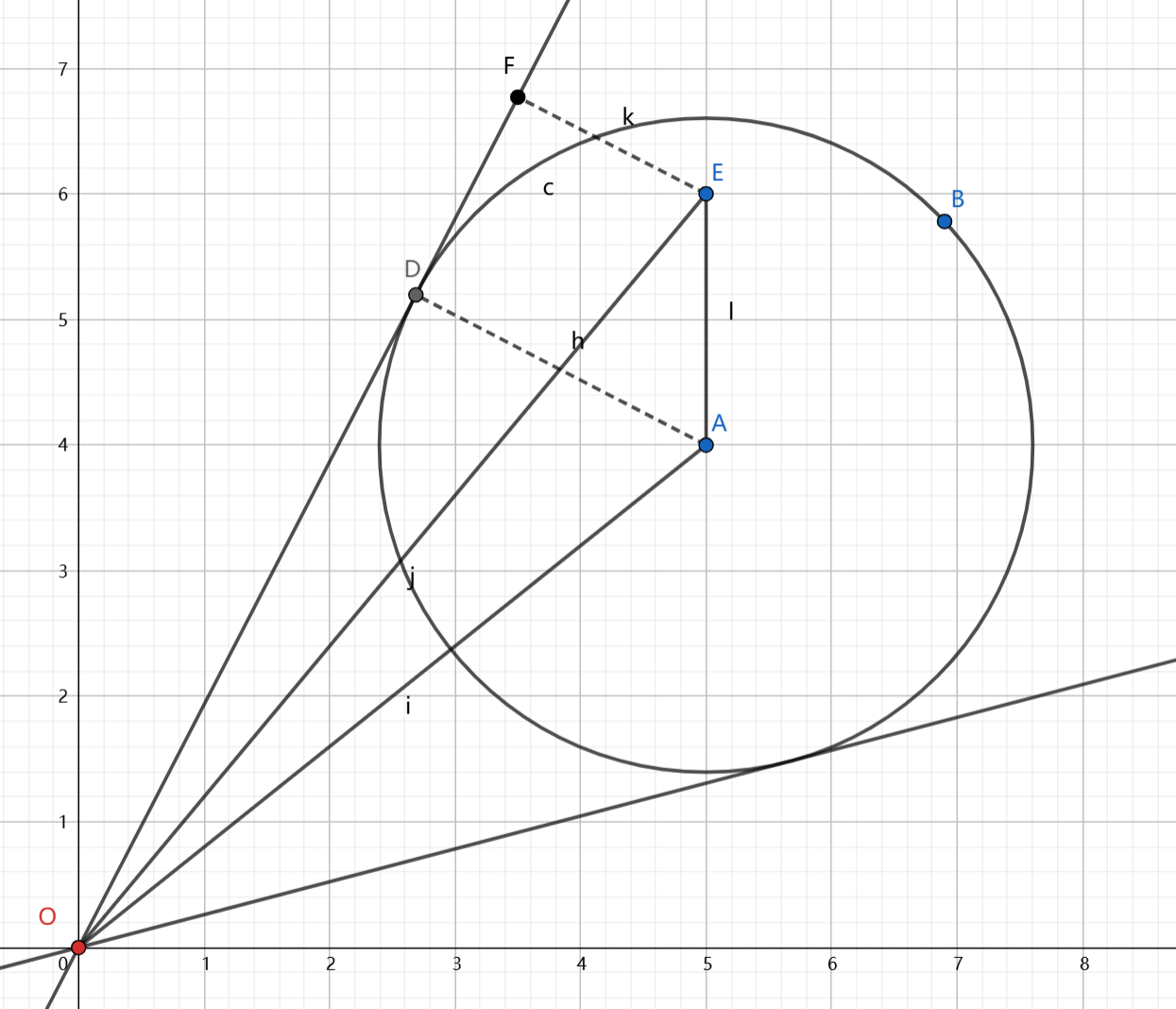
leg为OD的长度,假设direction为line的方向,即向量OD的单位向量DIR(a, b)顺时针的单位向量DIE (b, -a),A的坐标(x, y)
向量OA 点乘 向量DIR = 向量OA的长度 * 1 * cosAOD
=> x*a + y*b = leg
向量OA 点乘 向量DIE = 向量OA的长度 * 1 * cosOAD
=>x*b - y*a = combinedRadius
结合这两个式子就可以解a,b,
RVOMath.det(relativePosition, w) > 0.0
这个在判断修正方向是在相对位置的左边还是右边
3
速度的可选区域为line方向的左侧, linearProgram2 找到可行域的交集,即line的交集
3.1
RVOMath.det(lines.get(lineNo).direction, lines.get(lineNo).point.subtract(newVelocity)) > 0.0
大于0说明newVelocity在line的右侧,不在line的可行域内,需要重新计算速度
3.2
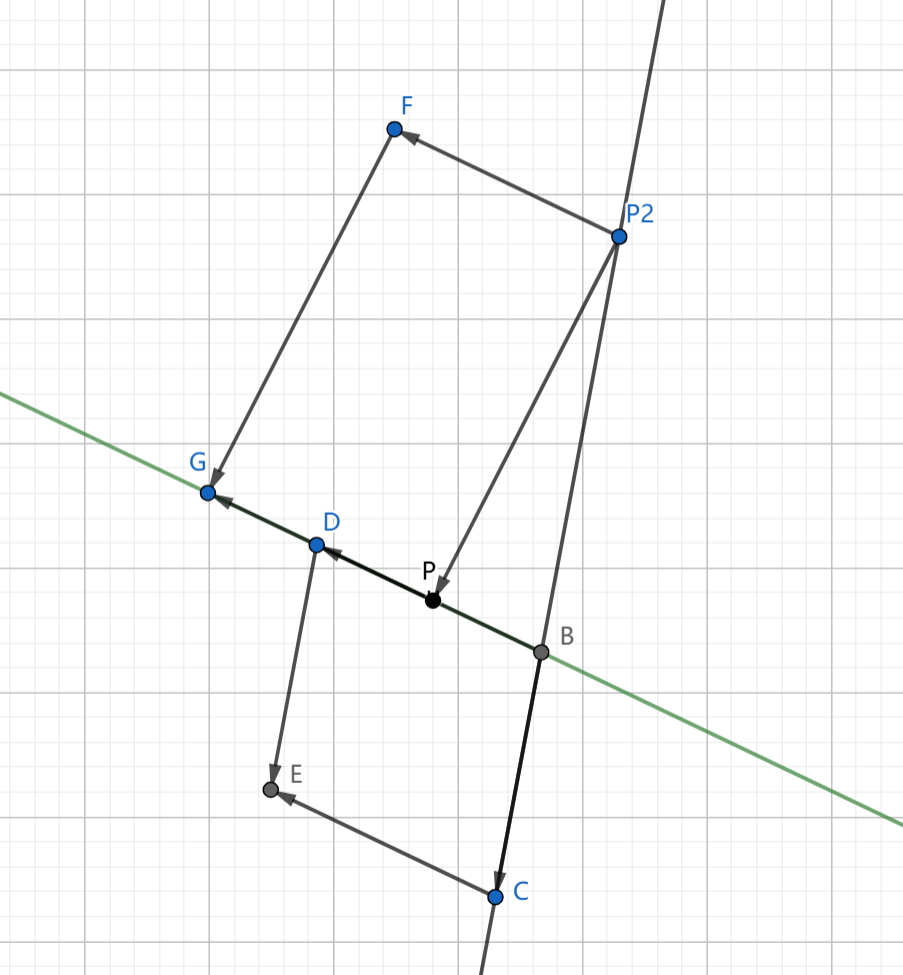
如图,绿色为line i, 黑色为line no
final double denominator = RVOMath.det(lines.get(lineNo).direction, lines.get(i).direction);
final double numerator = RVOMath.det(lines.get(i).direction, lines.get(lineNo).point.subtract(lines.get(i).point));
final double t = numerator / denominator;
denominator为BCED的面积 = 2个DBC的面积 = 2 * 1/2 * BP2 * 高
numerator为PGFP2的面积 = 2个GPP2 的面积 = 2个DBP2的面积 = 2 * 1/2 * BC * 高
t = numerator / denominator = BP2 / BC = BP2
t 为line i 和 line no 的交点 到 line point 的距离
4
linearProgram3
如果找不到line的交集,则执行linearProgram3,从上次失败的line开始往后遍历
将line i 之前的line做一个修正,修正的方法是:(1)将point修正到交点,(2)将方向修正到角平分线,靠近i的方向
RVOMath.det(lines.get(i).direction, lines.get(i).point.subtract(newVelocity)) > distance
这段代码用来判断是否需要修正速度,如果修正后的速度与当前line的距离大于前一个line的距离大,那么需要修正。
因为修正后速度将在角平分线上,一定距离当前line更近
ORCA避障源码笔记的更多相关文章
- Zepto源码笔记(一)
最近在研究Zepto的源码,这是第一篇分析,欢迎大家继续关注,第一次写源码笔记,希望大家多指点指点,第一篇文章由于首次分析原因不会有太多干货,希望后面的文章能成为各位大大心目中的干货. Zepto是一 ...
- redis源码笔记(一) —— 从redis的启动到command的分发
本作品采用知识共享署名 4.0 国际许可协议进行许可.转载联系作者并保留声明头部与原文链接https://luzeshu.com/blog/redis1 本博客同步在http://www.cnblog ...
- AsyncTask源码笔记
AsyncTask源码笔记 AsyncTask在注释中建议只用来做短时间的异步操作,也就是只有几秒的操作:如果是长时间的操作,建议还是使用java.util.concurrent包中的工具类,例如Ex ...
- Java Arrays 源码 笔记
Arrays.java是Java中用来操作数组的类.使用这个工具类可以减少平常很多的工作量.了解其实现,可以避免一些错误的用法. 它提供的操作包括: 排序 sort 查找 binarySearch() ...
- Tomcat8源码笔记(八)明白Tomcat怎么部署webapps下项目
以前没想过这么个问题:Tomcat怎么处理webapps下项目,并且我访问浏览器ip: port/项目名/请求路径,以SSM为例,Tomcat怎么就能将请求找到项目呢,项目还是个文件夹类型的? Tom ...
- Tomcat8源码笔记(七)组件启动Server Service Engine Host启动
一.Tomcat启动的入口 Tomcat初始化简单流程前面博客介绍了一遍,组件除了StandardHost都有博客,欢迎大家指文中错误.Tomcat启动类是Bootstrap,而启动容器启动入口位于 ...
- Tomcat8源码笔记(六)连接器Connector分析
根据 Tomcat8源码笔记(五)组件Container分析 前文分析,StandardService的初始化重心由 StandardEngine转移到了Connector的初始化,本篇记录下Conn ...
- Tomcat8源码笔记(五)组件Container分析
Tomcat8源码笔记(四)Server和Service初始化 介绍过Tomcat中Service的初始化 最先初始化就是Container,而Container初始化过程是咋样的? 说到Contai ...
- Tomcat8源码笔记(四)Server和Service初始化
上一章 简单说明下Tomcat各个组件: Server:服务器,Tomcat服务器,一个Tomcat只有一个Server组件; Service:业务层,是Server下最大的子容器,一个Server可 ...
- Tomcat8源码笔记(三)Catalina加载过程
之前介绍过 Catalina加载过程是Bootstrap的load调用的 Tomcat8源码笔记(二)Bootstrap启动 按照Catalina的load过程,大致如下: 接下来一步步分析加载过程 ...
随机推荐
- Java以封装对象的方式读取CSV文件存储数据库
依赖 <!-- https://mvnrepository.com/artifact/net.sourceforge.javacsv/javacsv --> <dependency& ...
- NOIP2023 游记 初见曙光
NOIP2023 游记 Day 0 明天就考 NOIP 了,今天还是得扎实的复习一下. 安排一下我的复习计划: 上午&&下午 复习线段树 复习权值线段树 学习带权并查集 复习 lca ...
- 【赵渝强老师】Oracle的PGA与数据库连接建立的过程
首先,我们来了解一下Oracle的内存结构,如下: 关于Oracle的内存结构,详情请查看:[赵强老师]Oracle数据库的内存结构 (一)PGA的组成结构 PGA主要由以下三部分组成: 私有SQL区 ...
- [摘录] WebView2 与 JS 交互
https://docs.microsoft.com/zh-cn/microsoft-edge/webview2/gettingstarted/win32 步骤 5-脚本 托管应用还可以将 JavaS ...
- aarch64 和 ARMV8 的区别
aarch64 和 ARMv8 是紧密相关但涵义不同的术语,在解释他们的区别之前,让我们先简单理解它们各自的含义: ARMv8: ARMv8 是指 ARM 架构的第八个版本,这是由 ARM Holdi ...
- 墨天轮访谈 | 阿里云捷熙:AnalyticDB,人人可用的数据分析服务
分享嘉宾:李婧玮(捷熙) 阿里云数据库资深产品经理 整理:墨天轮社区 导读 大家好,我是来自阿里云的捷熙.AnalyticDB是融合数据库.大数据技术于一体的云原生企业级数据仓库平台,今天我为大家带来 ...
- 15. Vue 数据双向绑定原理
在初始化 Vue 实例的时候,会遍历data中的数据,通过 Object.defineProperty 给数据添加 getter 和 setter 函数 ,获取数据触发 getter 函数 ,修改数据 ...
- 妙用编辑器:把EverEdit变成计算器
妙用编辑器:把EverEdit变成计算器 应用场景 日常工作过程中,会存在需要计算一些数据的场景,调用系统的计算器当然可以完成这项工作,但是需要来回切换,且系统自带的计算器没有表达式计算功能,真是不方 ...
- RocketMQ 全链路灰度探索与实践
本文作者:肖京,Spring Cloud Alibaba PMC,阿里云智能技术专家. 01 全链路灰度背景介绍 发布新版本时,为了有效.谨慎地验证新版本代码逻辑的正确性,通常会采用灰度发布,从而达到 ...
- .NET云原生应用实践(三):连接到PostgreSQL数据库
本章目标 实现基于PostgreSQL的SDAC(简单数据访问层) 将Stickers微服务切换到使用PostgreSQL SDAC 为什么选择PostgreSQL数据库? 其实并不一定要选择Post ...