PCLVisualizer可视化类(4)
博客转载自:http://www.pclcn.org/study/shownews.php?lang=cn&id=168
多视口显示
用户经常需要通过多视口比较点云,如果用户在同一个视口绘制点云,会导致信息混乱。PCLVisualizer可视化类允许用户通过不同视口(Viewport)绘制多个点云,这样方便对点云进行比较分析,viewportsVis函数的代码演示如何用多视口来显示点云计算法线的方法结果对比,如图1所示,并进行比较分析,利用不同的搜索半径,基于同一点云计算出对应不同半径的两组法线,第一组,搜索半径为0.05,基于该半径计算的法线用黑色背景显示,第二组,搜索半径为0.1,基于该半径计算的法线用灰色背景显示。这样比较两组法线,用户很容易观察到不同算法参数处理效果的差异,通过这种方法,用户可以很容易对算法参数做出选择,并实时的得到所设置参数的处理效果。
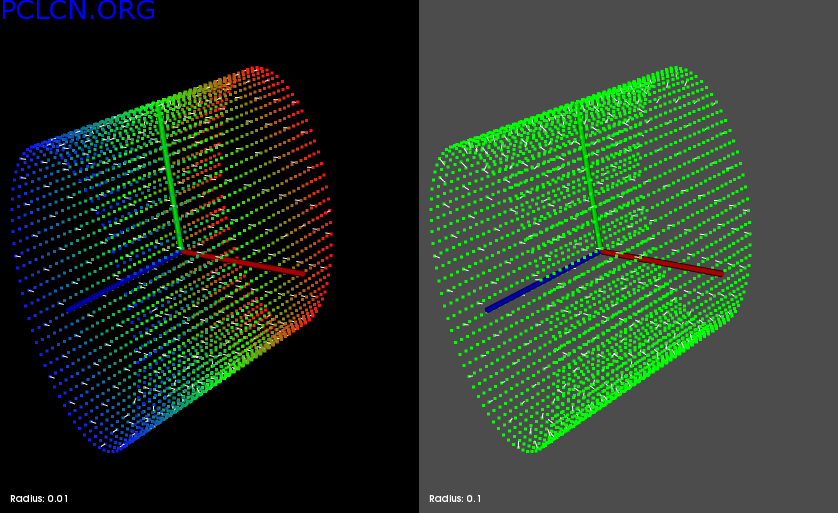
图1 多视口显示示例
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer (new pcl::visualization::PCLVisualizer ("3D Viewer"));
viewer->initCameraParameters ();
上面是创建视窗对象的标准代码。
int v1();
viewer->createViewPort (0.0, 0.0, 0.5, 1.0, v1);
viewer->setBackgroundColor (, , , v1);
viewer->addText ("Radius: 0.01", , , "v1 text", v1);
pcl::visualization::PointCloudColorHandlerRGBField<pcl::PointXYZRGB> rgb (cloud);
viewer->addPointCloud<pcl::PointXYZRGB> (cloud, rgb, "sample cloud1", v1);
上面几行代码,创建新的视口,所需的四个参数是视口在X轴的最小值、最大值、Y轴的最小值、最大值,取值在0-1之间。我们创建的视口分布于窗口的左半部分,最后一个字符串参数,用来唯一标识该视口,在其他改变该视口内容的调用中,需要以该唯一标识为参数,我们还设置该视口的背景颜色,添加一个标签以区别于其他视口,利用RGB颜色着色器并添加点云到当前视口中。
int v2(0);
viewer->createViewPort (0.5, 0.0, 1.0, 1.0, v2);
viewer->setBackgroundColor (0.3, 0.3, 0.3, v2);
viewer->addText ("Radius: 0.1", 10, 10, "v2 text", v2);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZRGB> single_color (cloud, 0, 255, 0);
viewer->addPointCloud<pcl::PointXYZRGB> (cloud, single_color, "sample cloud2", v2);
然后,我们对第二视口做同样的操作,使所创建的视点分布于右半窗口。我们将该视口背景赋予灰色,以便可以明显区别,虽然添加了同样的点云,但这次给点云用自定义颜色着色。
viewer->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, , "sample cloud1");
viewer->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, , "sample cloud2");
viewer->addCoordinateSystem (1.0);
上面三行代码为所有视口设置属性,大多数PCLVisualizer类的方法成员都有一个可以选择的视口ID参数,当设置该参数时,该方法只作用于所设置视口,不设置该参数的话,该方法作用于所有视口,就像这三行代码一样。
viewer->addPointCloudNormals<pcl::PointXYZRGB, pcl::Normal> (cloud, normals1, , 0.05, "normals1", v1);
viewer->addPointCloudNormals<pcl::PointXYZRGB, pcl::Normal> (cloud, normals2, , 0.05, "normals2", v2);
最后,我们添加法线,每个视口都有一组对应的法线。
PCLVisualizer可视化类(4)的更多相关文章
- PCLVisualizer可视化类
PCLVisualizer可视化类 转载自 http://www.cnblogs.com/li-yao7758258/p/6445127.html 如有疑问,请转至该网址留言询问 PCLVisuali ...
- PCLVisualizer可视化类(3)
viewer->addLine<pcl::PointXYZRGB> (cloud->points[0], cloud->points[cloud->size() - ...
- PCLVisualizer可视化类(1)
PCLVisualizer可视化类是PCL中功能最全的可视化类,与CloudViewer可视化类相比,PCLVisualizer使用起来更为复杂,但该类具有更全面的功能,如显示法线.绘制多种形状和多个 ...
- PCLVisualizer可视化类(2)
博客转载自:http://www.pclcn.org/study/shownews.php?lang=cn&id=163 可视化点云颜色特征 所示,点赋予不同的颜色表征其对应的z轴值不同.PC ...
- PCLVisualizer可视化类(5)
博客转载自:http://www.pclcn.org/study/shownews.php?lang=cn&id=171 自定义交互 多数情况下,默认的鼠标和键盘交互设置不能满足用户的需求,用 ...
- 基于PCL绘制模型并渲染
博客转载自:https://blog.csdn.net/wokaowokaowokao12345/article/details/51321988 前言 抛开算法层面不谈,要利用PCL库中PCLVis ...
- PCL可视化显示 直接加载显示pcb文件
简单可视化类,是指直接在程序中使用,而且不支持多线程. #include<iostream> #include<pcl\point_cloud.h> #include<p ...
- [翻译] FastReport Class Hierarchy (FastReport 组件类层次结构)
"TfrxComponent" is the base class for all FastReport components. Objects of this type have ...
- 数据可视化:绘图库-Matplotlib
为什么要绘图? 一个图表数据的直观分析,下面先看一组北京和上海上午十一点到十二点的气温变化数据: 数据: 这里我用一段代码生成北京和上海的一个小时内每分钟的温度如下: import random co ...
随机推荐
- F5与Ctrl+F5及地址栏输入地址回车
按F5等同于点击页面地址栏的刷新图标. 地址栏输入地址然后回车: 根据缓存内容是否过期决定是否发送请求给服务端 F5: 浏览器无论如何都得发送请求给服务端,包含If-Modified-Since/If ...
- 也谈设计模式Facade
门面模式提供一个高层次的接口,使得子系统更容易使用. 子系统与外部系统的通信必须经过一个统一的facade进行处理. 内部系统的交互在facade中进行整合,这样,对于外部系统的使用者就不用关注内部系 ...
- 本地建立SVN服务器
想在自己电脑上搭建SVN服务器,于是有以下步骤. 首先明确SVN服务包括服务器和客户端,平时听到的TortoiseSVN就是一个客户端. 首先下载两个软件,服务器端我使用的是VisualSVN,版本是 ...
- 启动Hadoop时DFSZKFailoverController没有启动
在启动Hadoop成功后,并没有报错信息,jps查看进程,发现DFSZKFailoverController没有启动成功,后来发现是因为防火墙的原因,关掉重试就OK了 systemctl stop f ...
- Java集合类--->入门下篇
HashSet集合 在上篇大概了解了什么是集合类,知道它可以存储任意类型的对象,并且比数组灵活,集合类的长度可以变化.这里将接着介绍一下,Set接口的实现类之一,HashSet集合,Set集合:元素不 ...
- 数据交换格式XML和JSON对比
1.简介: XML:extensible markup language,一种类似于HTML的语言,他没有预先定义的标签,使用DTD(document type definition)文档类型定义来组 ...
- HDU3579Hello Kiki(中国剩余定理)(不互质的情况)
One day I was shopping in the supermarket. There was a cashier counting coins seriously when a littl ...
- POJ1061 青蛙的约会 和 LOJ2721 「NOI2018」屠龙勇士
青蛙的约会 Language:Default 青蛙的约会 Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 133470 Accep ...
- 使用 Anthem.NET 框架的一个调试经历
简介:Anthem 是一个很好用的 Ajax 框架,支持 ASP.NET 1.1, 2.0.由于该框架的所有控件都继承自 ASP.NET 自身的服务器控件,保留了几乎所有这些控件的属性和行为(除了把它 ...
- 关于Snoop的用法
snoop是开发wpf应用程序的利器.用它可以观察WPF的可视树,监听事件,更改元素属性等. 下面我介绍下snoop一些用法. 1.获取指定应用程序的UI 打开snoop,选择"Drag ...