POJ2632 Crashing Robots 解题报告
Description
In a modernized warehouse, robots are used to fetch the goods. Careful planning is needed to ensure that the robots reach their destinations without crashing into each other. Of course, all warehouses are rectangular, and all robots occupy a circular floor space with a diameter of 1 meter. Assume there are N robots, numbered from 1 through N. You will get to know the position and orientation of each robot, and all the instructions, which are carefully (and mindlessly) followed by the robots. Instructions are processed in the order they come. No two robots move simultaneously; a robot always completes its move before the next one starts moving.
A robot crashes with a wall if it attempts to move outside the area of the warehouse, and two robots crash with each other if they ever try to occupy the same spot.
Input
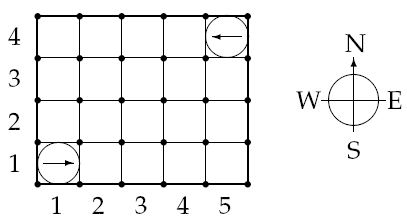
The first line of input is K, the number of test cases. Each test case starts with one line consisting of two integers, 1 <= A, B <= 100, giving the size of the warehouse in meters. A is the length in the EW-direction, and B in the NS-direction.
The second line contains two integers, 1 <= N, M <= 100, denoting the numbers of robots and instructions respectively.
Then follow N lines with two integers, 1 <= Xi <= A, 1 <= Yi <= B and one letter (N, S, E or W), giving the starting position and direction of each robot, in order from 1 through N. No two robots start at the same position.
Figure 1: The starting positions of the robots in the sample warehouseFinally there are M lines, giving the instructions in sequential order.
An instruction has the following format:
< robot #> < action> < repeat>
Where is one of
- L: turn left 90 degrees,
- R: turn right 90 degrees, or
- F: move forward one meter,
and 1 <= < repeat> <= 100 is the number of times the robot should perform this single move.
Output
Output one line for each test case:
- Robot i crashes into the wall, if robot i crashes into a wall. (A robot crashes into a wall if Xi = 0, Xi = A + 1, Yi = 0 or Yi = B + 1.)
- Robot i crashes into robot j, if robots i and j crash, and i is the moving robot.
- OK, if no crashing occurs.
Only the first crash is to be reported.
Sample Input
4
5 4
2 2
1 1 E
5 4 W
1 F 7
2 F 7
5 4
2 4
1 1 E
5 4 W
1 F 3
2 F 1
1 L 1
1 F 3
5 4
2 2
1 1 E
5 4 W
1 L 96
1 F 2
5 4
2 3
1 1 E
5 4 W
1 F 4
1 L 1
1 F 20
Sample Output
Robot 1 crashes into the wall
Robot 1 crashes into robot 2
OK
Robot 1 crashes into robot 2
分析:
纯粹的模拟,一开始没有注意到坐标系是从左下开始的,Debug了很久。。。
#include <cstring>
#include <cstdio>
#define INF 111
using namespace std;
struct node {
int px, py, di;
}f[INF];
int dx[4] = { 1, 0, -1, 0}, dy[4] = {0, 1, 0, -1};
int statu[INF], g[INF][INF];
char tem[] = "NESW";
int n, m, x, y, flag;
int main() {
int t, i, j, time, k, ans;
char ch;
scanf ("%d", &t);
while (t--) {
scanf ("%d %d %d %d", &y, &x, &n, &m);
memset (g, 0, sizeof g);
for (int k = 1; k <= n; k++) {
scanf ("%d %d %c", &j, &i, &ch);
g[i][j] = k, f[k].px = i, f[k].py = j;
f[k].di = strchr (tem, ch) - tem;
}
ans = 0, flag = 1;
while (m--) {
scanf ("%d %c %d", &k, &ch, &time);
if (!flag) continue;
int i = f[k].px, j = f[k].py, d = f[k].di;
if (ch == 'F') {
while (time--) {
g[i][j] = 0;
i += dx[d], j += dy[d];
if (g[i][j]) {
statu[k] = g[i][j], ans = k, flag = 0;
break;
}
else if (i < 1 || i > x || j < 1 || j > y) {
statu[k] = -1, ans = k, flag = 0;
break;
}
}
g[i][j] = k, f[k].px = i, f[k].py = j;
}
else {
if (ch == 'L') f[k].di = (f[k].di - time%4+4) % 4;
else
f[k].di = (f[k].di + time%4+4) % 4;
}
}
if (statu[ans] == 0) printf ("OK\n");
else if (statu[ans] == -1) printf ("Robot %d crashes into the wall\n", ans);
else
printf ("Robot %d crashes into robot %d\n", ans, statu[ans]);
}
return 0;
}
http://www.cnblogs.com/keam37/ keam所有 转载请注明出处
POJ2632 Crashing Robots 解题报告的更多相关文章
- POJ2632——Crashing Robots
Crashing Robots DescriptionIn a modernized warehouse, robots are used to fetch the goods. Careful pl ...
- poj2632 Crashing Robots
Crashing Robots Time Limit: 1000MS Memory Limit: 65536K Total Submissions: 9859 Accepted: 4209 D ...
- Codeforces Round #335 (Div. 2)B. Testing Robots解题报告
B. Testin ...
- POJ2632 Crashing Robots(模拟)
题目链接. 分析: 虽说是简单的模拟,却调试了很长时间. 调试这么长时间总结来的经验: 1.坐标系要和题目建的一样,要不就会有各种麻烦. 2.在向前移动过程中碰到其他的机器人也不行,这个题目说啦:a ...
- POJ-2632 Crashing Robots模拟
题目链接: https://vjudge.net/problem/POJ-2632 题目大意: 在一个a×b的仓库里有n个机器人,编号为1到n.现在给出每一个机器人的坐标和它所面朝的方向,以及m条指令 ...
- 北大ACM试题分类+部分解题报告链接
转载请注明出处:優YoU http://blog.csdn.net/lyy289065406/article/details/6642573 部分解题报告添加新内容,除了原有的"大致题意&q ...
- 模拟 --- Crashing Robots
Crashing Robots Time Limit: 1000MS Memory Limit: 65536K Total Submissions: 7394 Accepted: 3242 D ...
- CH Round #56 - 国庆节欢乐赛解题报告
最近CH上的比赛很多,在此会全部写出解题报告,与大家交流一下解题方法与技巧. T1 魔幻森林 描述 Cortana来到了一片魔幻森林,这片森林可以被视作一个N*M的矩阵,矩阵中的每个位置上都长着一棵树 ...
- 二模13day1解题报告
二模13day1解题报告 T1.发射站(station) N个发射站,每个发射站有高度hi,发射信号强度vi,每个发射站的信号只会被左和右第一个比他高的收到.现在求收到信号最强的发射站. 我用了时间复 ...
随机推荐
- 一段js实现复制文本内容到剪切板
<script type="text/javascript"> function copyUrl2() { var Url2=document.getElementBy ...
- vue-webpack所构建好的项目中增加Eslint
首先在package.json中配置eslint模块: 在终端运行命令:npm install 然后在build文件夹中web pack.base.conf.js配置eslint 接下来在在项目中新建 ...
- Android GetTimeAgo(时间戳转换几天前,几分钟前,刚刚等)
package com.studychen.seenews.util; import android.content.Context; /** * Created by tomchen on 2/26 ...
- wordpress在撰写新文章界面的显示选项按钮点击无反应的解决办法
原文链接:wordpress在撰写新文章界面的显示选项按钮点击无反应的解决办法 最近升级wordpress之后,发现在文章编辑界面的添加新媒体和可视化按钮点击无反应,如下: 然后就在网上找解决办法, ...
- 安卓(Android)关于 RecyclerView 不能填充满宽度
RecyclerView 不能填充满屏幕宽度 RecyclerView 的 Adapter 在使用是,一定要 @Overridepublic RecyclerView.ViewHolder onCre ...
- provider模式
最近看代码有所感想吧.当底层API,发生变化时,可以使用Provider模式.既然是模式就一定的股则. 1.该模式对原有接口的封装. 2.该模式实现对API的封装,不显示细节,从而取消依赖关系. 3. ...
- vultr服务器L2TP搭建
前期准备,购买外服,选择vultr服务商,可选择洛杉矶的,系统为Ubuntu 14.04 x64 一.安装L2TP/IPSec wget --no-check-certificate https:// ...
- Codeforces_791_B. Bear and Friendship Condition_(dfs)
B. Bear and Friendship Condition time limit per test 1 second memory limit per test 256 megabytes in ...
- ssh设置免秘钥登录
系统:CentOS7.2 需求:A服务器的fab用户需要使用www用户免秘钥登录到B服务器 换句话说,就是在A服务器的fab用户下,ssh www@B服务ip -p 端口 ,然后登录过去 ...
- 谷歌全屏脚本 start chrome.exe --kiosk http://www.baidu.com
start chrome.exe --kiosk http://www.baidu.com