机器人学 —— 机器人感知(Mapping)
对于移动机器人来说,最吸引人的莫过于SLAM,堪称Moving Robot 皇冠上的明珠。Perception 服务于 SLAM,Motion Plan基于SLAM。SLAM在移动机器人整个问题框架中,起着最为核心的作用。为了专注于Mapping,此章我们假设 Location 是已知的。
1、Metric Map
轨迹规划任务是再Metric Map的基础上完成的。当然,层次最高的是语意图,语意图是未来研究的热点方向。获取Metric Map 的难度最大之处在于:1、传感器噪声(May be solved by PGM; 2、机器人在移动(Location 问题);
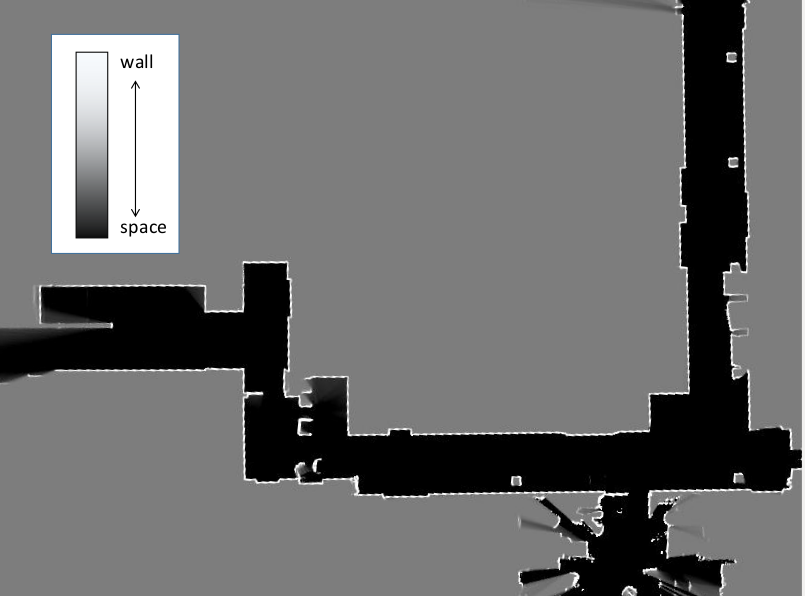
常见的MAP是基于UGV而言的, 使用的地图是Occupancy Map,与之前在轨迹规划栏目中的图一样,以 0 表示无法到达的区域,以 1 表示可以达到的区域。
2、传感器噪声问题的Naive Solution
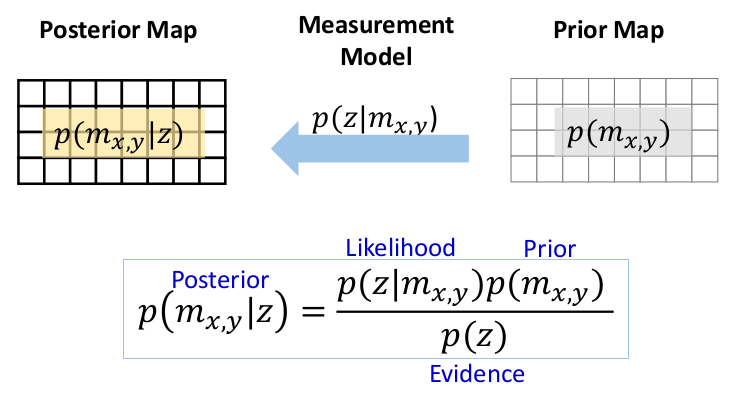
解决传感器噪声问题的方法是对传感器进行建模,其模型为概率模型:
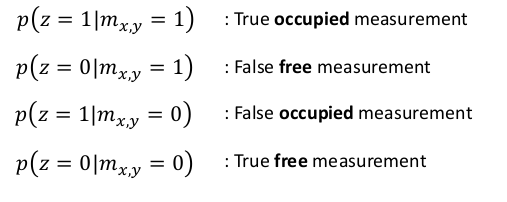
对于给定的观测,其factor 如上,当连续N次观测到同一个xy的值时,利用 factor product,即可获得n次观测的Joint CPD ,在Joint CPD 上运行MAP算法,即可获得最终的地图了。在通解的基础上,确实是这样设计算法的,但是我们目前面对的Mapping 问题还太Naive,不需要如此复杂的手段。
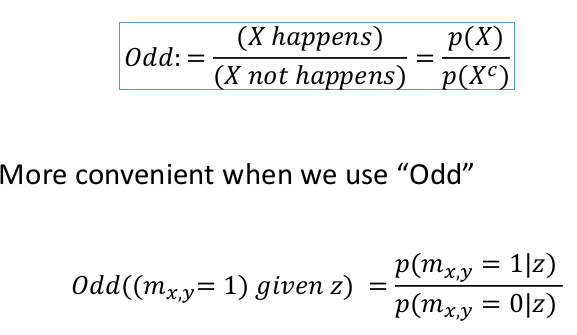
此处定义了一个odd,表示发生与否可能性的比值。换言之,就是传感器出错的概率比,这是一个可以估计的量。比如传感器测出有物体的odd是2,没物体的odd是3.
依据Beyes 公式把Odd展开:

其中,p(m = 1|z)/p(m = 0/z) 表示的是测量完成后 odd 的值,它等于 此次测量值 + 之前的odd。
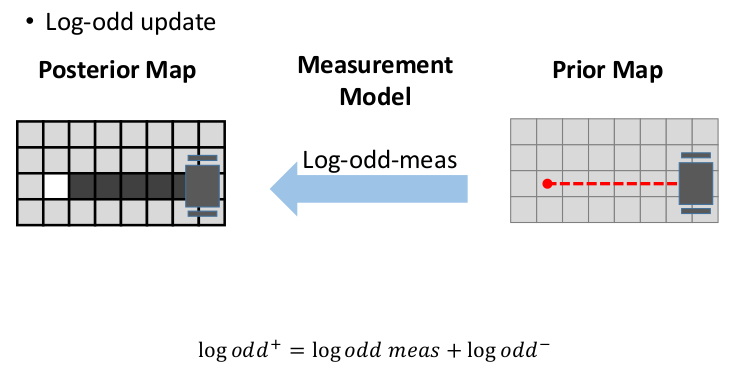
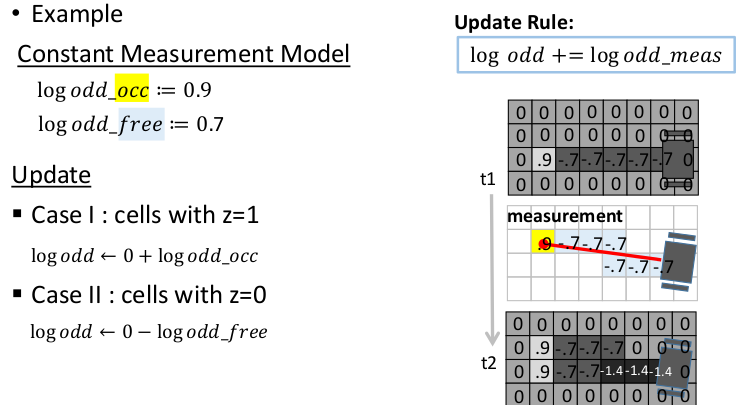
换言之,我们只要定义好先验图与log-odd-meas,就可以了。
3、Mapping Algorithm
所有的东西总是说起来容易做起来难。即使是如此Naive的Map,真正Coding还是很难的。尤其是如何高效的实现Map的更新,此外,机器人每次发出的激光线达上千条,每个位姿都要更新上前个点。对此问题,我设计了并行算法,即使在并行的条件下,生成一次Map也要近20s.
算法流程如下:
1、将激光击中的点变换到全局坐标系下
2、利用Breshenman 算法,获取激光通过的路径
3、获取Occupied Map 与 Free Map
4、更新Map.
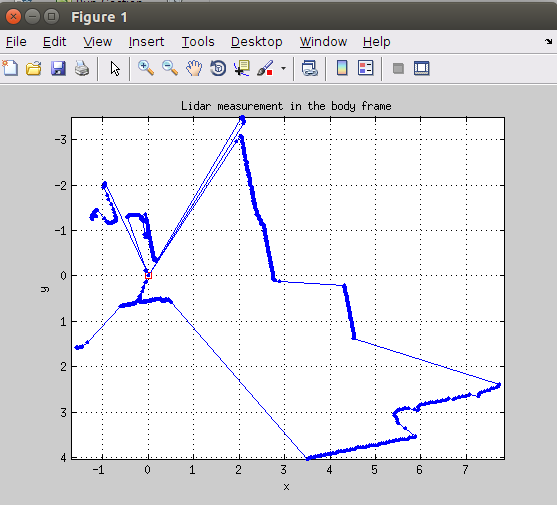

左图是单次测量的图,也就是机器人一个位姿的测量结果。显然,在靠近机器人的地方,噪声严重。右图是机器人在空间中移动后最终的Map。
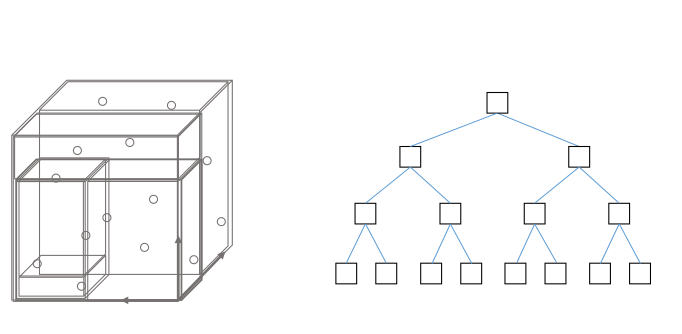
4、3D Mapping
对于2维地图,我们采用 free+occupy 的形式储存空间中的障碍物。然而有障碍物的地方毕竟还是少数,或者说,地图是稀疏的。
对于3维数据而言,我们用3维的空间来描述显然不划算,由其是当空间巨大时。此时我们选择的地图,或者说是数据结构是kd-tree 与 OcTree. 此部分内容在点云相关博客中有过介绍,不赘述。

机器人学 —— 机器人感知(Mapping)的更多相关文章
- 机器人学 —— 机器人感知(Kalman Filter)
对于机器人感知任务而言,经常需要预判物体的运动,保证机器人在物体与自身接触之前进行规避.比如无人机与障碍物的碰撞,足球机器人判断足球的位置.预判的前提是对当前状态进行准确的估计,比如足球的速度,障碍物 ...
- 机器人学 —— 机器人感知(Gaussian Model)
机器人感知是UPNN机器人专项中的最后一门课程,其利用视觉方法来对环境进行感知.与之前提到的机器人视觉不同,机器人感知更侧重于对环境物体的识别与检测.与计算机视觉不同,机器人视觉所识别的物体往往不需要 ...
- 机器人学 —— 机器人感知(Location)
终于完成了Robotic SLAM 所有的内容了.说实话,课程的内容比较一般,但是作业还是挺有挑战性的.最后一章的内容是 Location. Location 是 Mapping 的逆过程.在给定ma ...
- 机器人学 —— 机器人视觉(Bundle Adjustment)
今天完成了机器人视觉的所有课程以及作业,确实是受益匪浅啊! 最后一个话题是Bundle Adjustment. 机器人视觉学中,最顶尖的方法. 1.基于非线性优化的相机位姿估计 之前已经在拟合一篇中, ...
- Robot Perception for Indoor Navigation《室内导航中的机器人感知》
Felix Endres 论文下载 Technische Fakult¨ atAlbert-Ludwigs-Universit¨ at Freiburg Betreuer: Prof. Dr. Wol ...
- ROSCon 2016视频和幻灯片发布 ROS机器人操作系统重要参考资料
ROSCon 2016视频和幻灯片发布 By Tully Foote on 十月19,2016 7:28 AM 全部PPT下载地址:http://pan.baidu.com/s/1gf2sn2F RO ...
- (转) SLAM系统的研究点介绍 与 Kinect视觉SLAM技术介绍
首页 视界智尚 算法技术 每日技术 来打我呀 注册 SLAM系统的研究点介绍 本文主要谈谈SLAM中的各个研究点,为研究生们(应该是博客的多数读者吧)作一个提纲挈领的摘要.然后,我 ...
- 漫谈 SLAM 技术(上)
欢迎大家前往腾讯云社区,获取更多腾讯海量技术实践干货哦~ 作者:解洪文 导语 随着最近几年机器人.无人机.无人驾驶.VR/AR的火爆,SLAM技术也为大家熟知,被认为是这些领域的关键技术之一.本文对S ...
- 视觉SLAM漫谈 (三): 研究点介绍
1. 前言 读者朋友们大家好!(很久很久)之前,我们为大家介绍了SLAM的基本概念和方法.相信大家对SLAM,应该有了基本的认识.在忙完一堆写论文.博士开题的事情之后,我准备回来继续填坑:为大家介绍S ...
随机推荐
- Aizu0121 Seven Puzzle(bfs+康托展开)
https://vjudge.net/problem/Aizu-0121 比八数码要水的多,bfs. 但是做的时候我把康托展开记错了,wa了好几次. 附上康托展开博客详解:https://blog.c ...
- springboot邮件发送与接收读取
发送邮件 <dependency> <groupId>org.springframework.boot</groupId> <artifactId>sp ...
- ABAP语言实现 左移 <<、无符号右移 >>> 位移操作
这几天要在ABAP中实现 3DES 标准对称加密算法,与其他外部系统进行加密/解密操作.由于ABAP语言中没有 左移 <<.无符号右移 >>> 操作,只能自己实现 思路 ...
- 【JavaScript从入门到精通】第三课 初探JavaScript魅力-03
第三课 初探JavaScript魅力-03 函数传参 上节课的时候我们已经讲了什么是函数,实际上,函数在功能上就类似于css的class一样,将一段代码包裹起来使用.为了让函数的功能更加的丰富和实用, ...
- nrm管理npm源
npm源:npm install命令下载需要依赖包的服务器地址,默认是 npm ---- https://registry.npmjs.org/ 而国外的源速度太慢,所以我们一般都用国内的淘宝源tao ...
- SQL Server里如何处理死锁
在今天的文章里,我想谈下SQL Server里如何处理死锁.当2个查询彼此等待时会发生死锁,没有一个查询可以继续它们的操作.首先我想给你大致讲下SQL Server如何处理死锁.最后我会展示下SQL ...
- NOIP2010普及组 导弹拦截
导弹拦截 OJ地址: https://www.luogu.org/problemnew/show/P1158 http://codevs.cn/problem/1128/ 题目描述 Descrip ...
- 单表40G,不要吃惊,还能往里面插入数据,哈哈
单表40G,不要吃惊,还能往里面插入数据,哈哈 上图:
- WCF-Oracel适配器针对UDT的使用配置与注意事项
配置方法 1.针对Oracle UDT 的数据类型需要在开发过程中手动配置生成的DLL位置和Key位置,Visual Studio->添加生成项目->Add Adapter Metadat ...
- Android PopupWindow 仿微信弹出效果
项目中,我须要PopupWindow的时候特别多,这个东西也特别的好使,所以我今天给大家写一款PopupWindow 仿微信弹出效果.这样大家直接拿到项目里就能够用了! 首先让我们先看效果: 那么我首 ...