ROS 安装kinect驱动+测试
有时 ,需要用到kinect 的所有需要驱动才能使用kinect ,turtlebot2上的传感器就是kinect ,所以kinect 的用处还是很多的 , 今天就来讲一下kinect 驱动在unbuntu 中的安装。
1.第一步要有个ubuntu 系统, 我的系统是 14.04.5的 还要有一个kinect 加上kinect 的适配器。还有就是要把驱动的包下载下来。这四个条件的都具备了 ,我们开始安装驱动。
OpenNI: https://pan.baidu.com/s/1o7YzAgq (百度云的链接) SensorKinect: https://pan.baidu.com/s/1o8Nk5z8 (百度云的分享)
2.接下来安装步骤,进行安装,尽量不要拷贝,多用tab 提示
//libfreenect for kinect
sudo apt-get install libfreenect-dev
sudo apt-get install ros-indigo-freenect-launch //openni
//Installing dependencies:
sudo apt-get install g++ python libusb-1.0-0-dev freeglut3-dev
sudo apt-get install doxygen graphviz mono-complete
sudo apt-get install openjdk-7-jdk //Intalling OpenNI:
git clone https://github.com/OpenNI/OpenNI.git
cd OpenNI
git checkout Unstable-1.5.4.0
cd Platform/Linux/CreateRedist
sudo chmod +x RedistMaker
./RedistMaker
cd ../Redist/OpenNI-Bin-Dev-Linux-[xxx]
sudo ./install.sh //Installing Kinect driver
git clone git://github.com/ph4m/SensorKinect.git
cd SensorKinect/Platform/Linux/CreateRedist
sudo chmod +x RedistMaker
./RedistMaker
cd ../Redist/Sensor-Bin-Linux-x64-v*
sudo ./install.sh
按照上边的步骤安装,如果没有错误。就说明驱动安装没有什么问题。
3.下载测试的程序,进行测试kinect 的是否安装成功。
cd ~/catkin_ws/src
git clone https://github.com/ros-drivers/openni_launch
git clone https://github.com/ros-drivers/openni_camera
cd ..
catkin_make
source devel/setup.bash
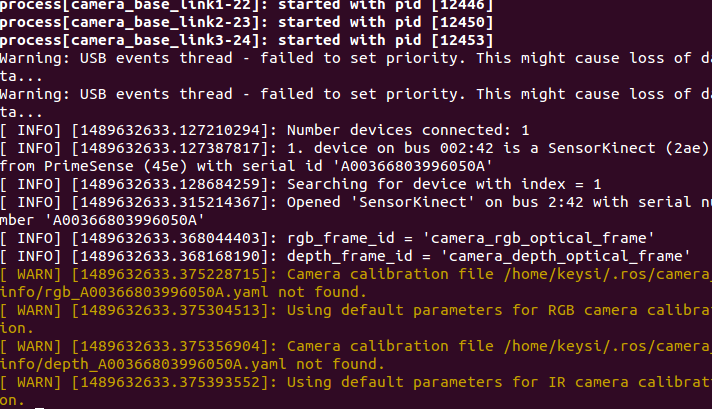
4.运行launch 文件启动kinect
roslaunch openni_launch openni.launch
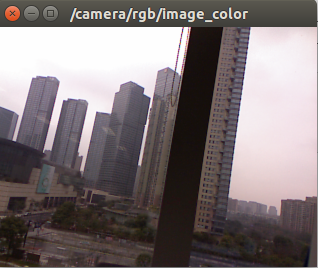
5.显示kinect 中的话题
rosrun image_view image_view image:=/camera/rgb/image_color
ROS 安装kinect驱动+测试的更多相关文章
- ARM TK1 安装kinect驱动
首先安装usb库 $ git clone https://github.com/libusb/libusb.git 编译libusb需要的工具 $ sudo apt-get install autoc ...
- Jetson TX1 安装Kinect驱动
1.添加Universe源 $ sudo apt-add-repository universe $ sudo apt-get update 2.安装编译工具和依赖项 $ sudo apt-get i ...
- kinect在ros上的初步测试---17
摘要: 原创博客:转载请表明出处:http://www.cnblogs.com/zxouxuewei/ 1.在使用本贴前必须先按照我的上一个博文正确在ubuntu上安装kinect驱动:http:// ...
- Kinect for Xbox one(v2) + Ubuntu 14.04 +ROS 安装
相比于kinect for xbox 360(v1)通过结构光来获取深度,Kinect for Xbox one(v2) 采用time flight技术,极大改善了深度图像的性能. kinect fo ...
- Kinect1驱动 PCL OpenCV ROS 安装
1. OpenCV安装 1)在终端安装依赖项sudo apt-get install build-essential libgtk2.0-dev libjpeg-dev libtiff4-dev li ...
- Debian/Ubuntu手动编译安装MongoDB C++11驱动及驱动测试
本文章仅限cnblogs网站内转载!请某网站自觉,遵纪守法,尊重原创! 系统环境情况: 最小化.无桌面环境 新安装的Debian 8 Server 版本操作系统虚拟机一台 手动编译安装MongoDB ...
- ROS学习笔记一:ROS安装与测试
1 Ubuntu和ROS版本的对应关系 Ubuntu 和 ROS 都存在不同的版本,其对应关系如下: 注:如果Ubuntu版本和ROS版本不对应的话,安装就不会成功了- 笔者安装的是Ubuntu14. ...
- ubuntu16.04+ROS安装kinectV1
1.安装驱动 安装ROS软件包以下2种方式,任选一种即可,当然全部安装也没有问题 1)使用openni_launch sudo apt-get install ros-kinetic-openni-c ...
- ROS与深度相机入门教程-在ROS使用kinect v1摄像头
ROS与深度相机入门教程-在ROS使用kinect v1摄像头 说明: 介绍在ros安装和使用kinect v1摄像头 介绍freenect包 安装驱动 deb安装 $ sudo apt-get in ...
随机推荐
- JS 数组对象根据下标拆分成新的数组
真为难啊! var arr = [ {guigeArr:['蓝色','XL','3','S']}, {guigeArr:['蓝色','L','6','S']}, {guigeArr:['蓝色','L' ...
- 基于 Web 的 Go 语言 IDE - Wide 1.5.2 发布!
这个版本由热心的开源贡献者加入了韩语支持,欢迎各位 gophers 加入到 Wide 的开源开发中.另外,这个版本还改进了 Playground,使其更稳定和易用.目前黑客派社区已经支持嵌入 Wide ...
- ConcurrentDictionary的用法
private static ConcurrentDictionary<Guid, string> dictDbNames = new ConcurrentDictionary<Gu ...
- AndroidGradle最实用的指南
AndroidStudio目前已经成为Android开发人员的主流工具,而Gradle的原理,配置,使用仍然是很多android开发人员感到困惑的地方.网上虽然有很多相关文档,但是要么是只会用但是不知 ...
- Paxos协议笔记
对Paxos协议的介绍,可以通过Leslie Lamport的<Paxos Made Simple>展开学习和了解.Paxos算法在允许失败的分布式系统环境下,实现系统一致性.失败的情况有 ...
- git中设置代理,本地不使用代理,针对域名设置代理
想要的效果是: [1]本地IP不使用代理 [2]外网的仓库(如GitHub)使用代理 [3]适用于全局 方案 打开路径: C --> 用户 --> [我的账号] --> .gitco ...
- [Windows] [Firewall] 增加进入规则
netsh advfirewall firewall add rule name="Open Port 80" dir=in action=allow protocol=TCP l ...
- 指定的 DSN 中,驱动程序和应用程序之间的体系结构不匹配
在做通过 PL/SQL 导入Excel 数据的时候,在进行数据库连接的时候,选择DSN为Excel ,输入用户名和密码,进行Connect 出现错误“指定的 DSN 中,驱动程序和应用程序之间的体系结 ...
- sudo控制权限简单用法介绍
为了安全及管理的方便,可将需要用root权限的用户加入到sudo管理,用root的权限来管理系统.利用sudo控制用户对系统命令的使用权限. 普通用户可以查看,但不能删除: 但是在/tmp公共环境下可 ...
- Linux内核参数基础优化
web 服务负载均衡器常规网站服务器优化的基本配置: net.ipv4.tcp_fin_timeout =2 net.ipv4.tcp_tw_reuse =1 net.ipv4.tcp_tw_recy ...