uboot1: 启动流程和移植框架
0 环境
ARMV8,uboot 2020.10,rpi3平台
1 移植框架
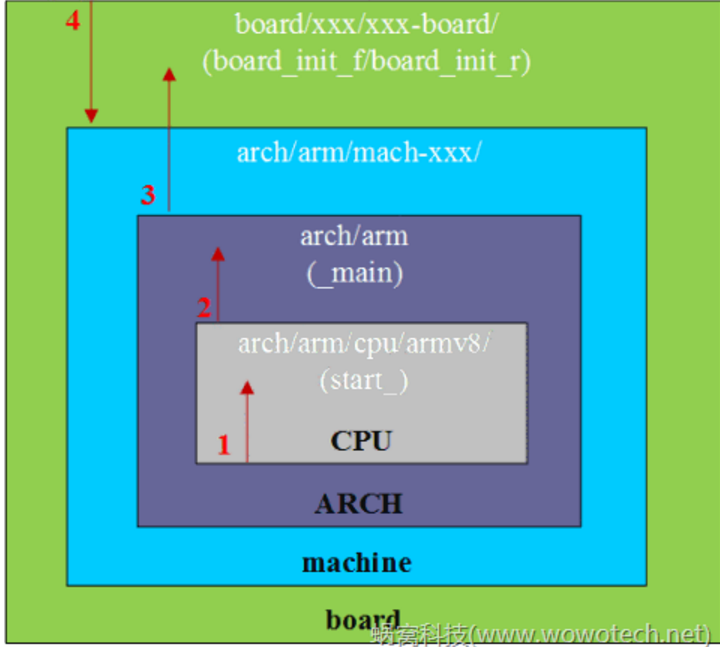
- board,不用说了,板级,uboot使用dts后,这块代码应尽量简化
- machine, SOC级,主要是一些外设
- ARCH, 如arm(包含armv7和armv8)
- CPU, 如armv8
各框架启动时的关系:

配置相关文件:
configs/xxx_defconfig: 平台的默认配置,make ***_defconfig时会用到
include/conigs/***.h: 各平台的一些额外CONFIG_配置项,写在头文件里
3 执行流程

3.0 链接地址
Makefile中:
LDFLAGS_u-boot += -Ttext $(CONFIG_SYS_TEXT_BASE)
链接文件
ENTRY(_start)
SECTIONS
{
. = 0x00000000; /*text段在lds文件的偏移0*/
. = ALIGN(8);
.text :
{
*(.__image_copy_start)
arch/arm/cpu/armv8/start.o (.text*)
}
...
- CONFIG_SYS_TEXT_BASE: lds文件中偏移为0,再结合-Ttext选项, 所以CONFIG_SYS_TEXT_BASE是重定位之前,最初的uboot起始地址
3.1 start.S, 入口

此阶段的CONFIG_
已定义:
CONFIG_SYS_TEXT_BASE: uboot realocate之前的起始地址,代码里 _TEXT_BASE = CONFIG_SYS_TEXT_BASE
未定义:
CONFIG_SYS_RESET_SCTRL, 设置 little endian, 关cache, 关MMU
CONFIG_ARMV8_SET_SMPEN, 若为EL3,使能SMPEN, EL2/1无动作
CONFIG_ARMV8_SPIN_TABLE和CONFIG_ARMV8_MULTIENTRY,像是两种处理slave core的方式,不过rpi3应该只有core0执行uboot,所以都没有定义
代码加注释:arch/arm/cpu/armv8/start.S
/*************************************************************************
*
* Startup Code (reset vector)
*
*************************************************************************/
.globl _start
_start:
#if defined(CONFIG_LINUX_KERNEL_IMAGE_HEADER)
#include <asm/boot0-linux-kernel-header.h>
#elif defined(CONFIG_ENABLE_ARM_SOC_BOOT0_HOOK)
/*
* Various SoCs need something special and SoC-specific up front in
* order to boot, allow them to set that in their boot0.h file and then
* use it here.
*/
#include <asm/arch/boot0.h>
#else
b reset // 执行此分支
#endif
.align 3 # 2^3 = 8 Bytes对齐
/*
* 计算几个变量的值,并写入bin文件里,这些变量后面会用到
*/
.globl _TEXT_BASE
_TEXT_BASE:
.quad CONFIG_SYS_TEXT_BASE
/*
* These are defined in the linker script.
*/
.globl _end_ofs
_end_ofs:
.quad _end - _start
.globl _bss_start_ofs
_bss_start_ofs:
.quad __bss_start - _start
.globl _bss_end_ofs
_bss_end_ofs:
.quad __bss_end - _start
reset:
/* Allow the board to save important registers */
b save_boot_params // 一般为空,直接跳到save_boot_params_ret
.globl save_boot_params_ret
save_boot_params_ret:
#if CONFIG_POSITION_INDEPENDENT // 未定义
/*
* Fix .rela.dyn relocations. This allows U-Boot to be loaded to and
* executed at a different address than it was linked at.
*/
pie_fixup:
adr x0, _start /* x0 <- Runtime value of _start */
ldr x1, _TEXT_BASE /* x1 <- Linked value of _start */
sub x9, x0, x1 /* x9 <- Run-vs-link offset */
adr x2, __rel_dyn_start /* x2 <- Runtime &__rel_dyn_start */
adr x3, __rel_dyn_end /* x3 <- Runtime &__rel_dyn_end */
pie_fix_loop:
ldp x0, x1, [x2], #16 /* (x0, x1) <- (Link location, fixup) */
ldr x4, [x2], #8 /* x4 <- addend */
cmp w1, #1027 /* relative fixup? */
bne pie_skip_reloc
/* relative fix: store addend plus offset at dest location */
add x0, x0, x9
add x4, x4, x9
str x4, [x0]
pie_skip_reloc:
cmp x2, x3
b.lo pie_fix_loop
pie_fixup_done:
#endif
// 未定义此宏,设置 little endian, 关cache、 关MMU
#ifdef CONFIG_SYS_RESET_SCTRL
bl reset_sctrl
#endif
#if defined(CONFIG_ARMV8_SPL_EXCEPTION_VECTORS) || !defined(CONFIG_SPL_BUILD)
.macro set_vbar, regname, reg
msr \regname, \reg
.endm
adr x0, vectors # vectors是中断向量表,在arch/arm/cpu/armv8/exception.S中定义
#else
.macro set_vbar, regname, reg
.endm
#endif
/*
* Could be EL3/EL2/EL1, Initial State:
* Little Endian, MMU Disabled, i/dCache Disabled
*/
switch_el x1, 3f, 2f, 1f
3: set_vbar vbar_el3, x0
mrs x0, scr_el3
orr x0, x0, #0xf /* SCR_EL3.NS|IRQ|FIQ|EA */
msr scr_el3, x0
msr cptr_el3, xzr /* Enable FP/SIMD */
#ifdef COUNTER_FREQUENCY
ldr x0, =COUNTER_FREQUENCY
msr cntfrq_el0, x0 /* Initialize CNTFRQ */
#endif
b 0f
2: set_vbar vbar_el2, x0
mov x0, #0x33ff
msr cptr_el2, x0 /* Enable FP/SIMD */
b 0f
1: set_vbar vbar_el1, x0 /* 设置中断向量表,x0 = vectors */
mov x0, #3 << 20
msr cpacr_el1, x0 /* Enable FP/SIMD */
0:
isb
/*
* Enable SMPEN bit for coherency.
* This register is not architectural but at the moment
* this bit should be set for A53/A57/A72.
*/
#ifdef CONFIG_ARMV8_SET_SMPEN // 未定义
switch_el x1, 3f, 1f, 1f
3:
mrs x0, S3_1_c15_c2_1 /* cpuectlr_el1 */
orr x0, x0, #0x40
msr S3_1_c15_c2_1, x0
isb
1:
#endif
/* Apply ARM core specific erratas,处理一些已知的芯片bug */
bl apply_core_errata
/*
* Cache/BPB/TLB Invalidate
* i-cache is invalidated before enabled in icache_enable()
* tlb is invalidated before mmu is enabled in dcache_enable()
* d-cache is invalidated before enabled in dcache_enable()
*/
/* Processor specific initialization */
// 初始化临时sp, 实现一个weak函数s_init,给各个平台一个早期初始化的机会
// 不过重新实现s_init的厂商不多
bl lowlevel_init
#if defined(CONFIG_ARMV8_SPIN_TABLE) && !defined(CONFIG_SPL_BUILD)
branch_if_master x0, x1, master_cpu
b spin_table_secondary_jump
/* never return */
#elif defined(CONFIG_ARMV8_MULTIENTRY)
branch_if_master x0, x1, master_cpu
/*
* Slave CPUs
*/
slave_cpu:
wfe
ldr x1, =CPU_RELEASE_ADDR
ldr x0, [x1]
cbz x0, slave_cpu
br x0 /* branch to the given address */
#endif /* CONFIG_ARMV8_MULTIENTRY */
master_cpu:
bl _main /* 跳转后不返回*/
3.2 __main
此阶段的CONFIG_
已定义:
CONFIG_SYS_INIT_SP_ADDR: 调用board_init_f和relocate_code之前用的SP
CONFIG_SYS_MALLOC_F_LEN: 早期用于malloc的空间大小
未定义:
CONFIG_TPL_BUILD:TPL跟SPL差不多,是第三级程序加载器,也是一个精简版的u-boot,很少用到,参见 doc/README.TPL
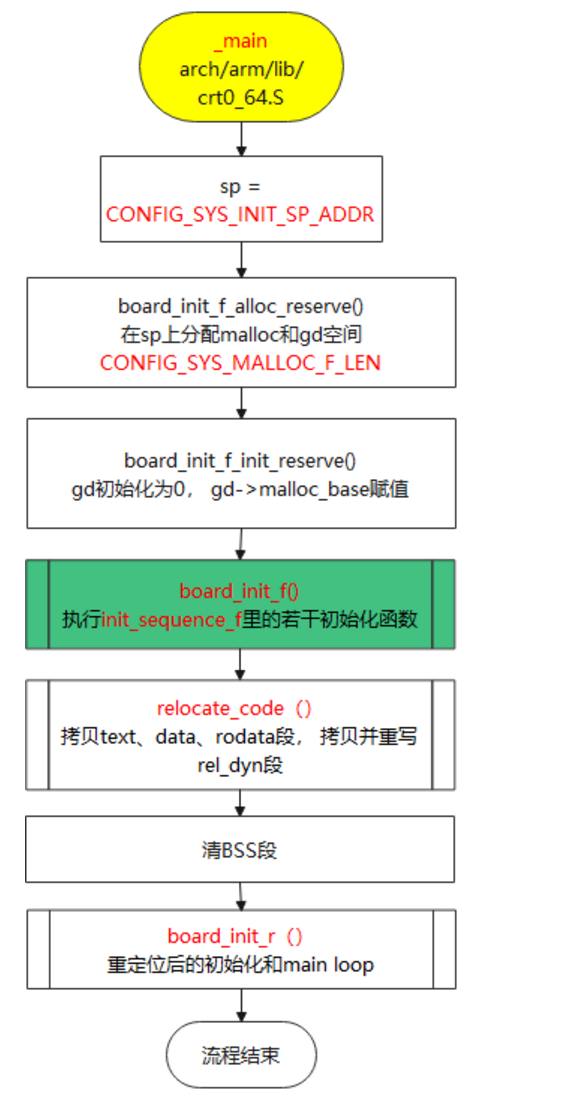
代码加注释:arch/arm/lib/crt0_64.S
ENTRY(_main)
/*
* Set up initial C runtime environment and call board_init_f(0).
* 先分配SP地址(CONFIG_SYS_INIT_SP_ADDR), 在sp上分配大名鼎鼎的gd_t空间,gd_t是重要的全局数据,地址保存在X18里,整个uboot都在使用
*/
#if defined(CONFIG_TPL_BUILD) && defined(CONFIG_TPL_NEEDS_SEPARATE_STACK)
ldr x0, =(CONFIG_TPL_STACK)
#elif defined(CONFIG_SPL_BUILD) && defined(CONFIG_SPL_STACK)
ldr x0, =(CONFIG_SPL_STACK)
#elif defined(CONFIG_INIT_SP_RELATIVE)
adr x0, __bss_start
add x0, x0, #CONFIG_SYS_INIT_SP_BSS_OFFSET
#else
ldr x0, =(CONFIG_SYS_INIT_SP_ADDR) // 进此分支, CONFIG_SYS_INIT_SP_ADDR一般在include/configs/****.h中定义
#endif
bic sp, x0, #0xf /* 16-byte alignment for ABI compliance */
mov x0, sp
bl board_init_f_alloc_reserve // 从sp顶端分配早期malloc空间(受CONFIG_SYS_MALLOC_F_LEN控制),分配global_data(gd)空间
mov sp, x0
/* set up gd here, outside any C code, 把global_data的地址赋给X18,X18始终保存着gd的地址 */
mov x18, x0
bl board_init_f_init_reserve // gd初始化为0, gd->malloc_base赋值(受CONFIG_SYS_MALLOC_F_LEN控制)
mov x0, #0
bl board_init_f // front, 前置初始化.执行函数指针数组init_sequence_f里的若干初始化函数,会把重定位时需要的若干信息写给gd
#if !defined(CONFIG_SPL_BUILD)
/*
* Set up intermediate environment (new sp and gd) and call
* relocate_code(addr_moni). Trick here is that we'll return
* 'here' but relocated.
*/
ldr x0, [x18, #GD_START_ADDR_SP] /* x0 <- gd->start_addr_sp, 获取重定位后的sp地址*/
bic sp, x0, #0xf /* 16-byte alignment for ABI compliance ,将重定位后的地址赋给sp */
ldr x18, [x18, #GD_NEW_GD] /* x18 <- gd->new_gd, 将重定位后的gd地址赋给X18 */
/* 先把relocation_return给lr,此时lr的地址是为重定位前的relocation_return
* 后面会给lr增加重定位的offset,保证重定位执行完毕返回lr时,能找到重定位后的relocation_return
*/
adr lr, relocation_return
#if CONFIG_POSITION_INDEPENDENT // 未定义
/* Add in link-vs-runtime offset */
adr x0, _start /* x0 <- Runtime value of _start */
ldr x9, _TEXT_BASE /* x9 <- Linked value of _start */
sub x9, x9, x0 /* x9 <- Run-vs-link offset */
add lr, lr, x9
#endif
/* Add in link-vs-relocation offset */
ldr x9, [x18, #GD_RELOC_OFF] /* x9 <- gd->reloc_off */
add lr, lr, x9 /* new return address after relocation, 给lr加上重定位offset,此时lr已经指向重定位后的relocation_return */
ldr x0, [x18, #GD_RELOCADDR] /* x0 <- gd->relocaddr, 重定位后的起始地址 */
b relocate_code /* 重定位,拷贝text、data、rodata段, 拷贝并重写rel_dyn段,具体原理单独描述 */
relocation_return:
/*
* Set up final (full) environment
*/
bl c_runtime_cpu_setup /* still call old routine, 设置中断向量表vbar_elX */
#endif /* !CONFIG_SPL_BUILD */
#if !defined(CONFIG_SPL_BUILD) || CONFIG_IS_ENABLED(FRAMEWORK)
#if defined(CONFIG_SPL_BUILD)
bl spl_relocate_stack_gd /* may return NULL */
/* set up gd here, outside any C code, if new stack is returned */
cmp x0, #0
csel x18, x0, x18, ne
/*
* Perform 'sp = (x0 != NULL) ? x0 : sp' while working
* around the constraint that conditional moves can not
* have 'sp' as an operand
*/
mov x1, sp
cmp x0, #0
csel x0, x0, x1, ne
mov sp, x0
#endif
/*
* Clear BSS section
*/
ldr x0, =__bss_start /* this is auto-relocated! */
ldr x1, =__bss_end /* this is auto-relocated! */
clear_loop:
str xzr, [x0], #8
cmp x0, x1
b.lo clear_loop
/* call board_init_r(gd_t *id, ulong dest_addr) */
mov x0, x18 /* gd_t */
ldr x1, [x18, #GD_RELOCADDR] /* dest_addr */
b board_init_r /* PC relative jump,重定位后的初始化和main loop, rear后置初始化 */
/* NOTREACHED - board_init_r() does not return */
#endif
ENDPROC(_main)
3.3 board_init_f()和init_sequence_f[]
此阶段的CONFIG_选项:
已定义:
CONFIG_OF_CONTROL:使用device tree
CONFIG_OF_EMBED: dts与uboot集成到一起,一般都用此方式。makefile连接时会把dtb放到__dtb_dt_begin的位置
CONFIG_DM: 使能driver model,驱动模型,一套抽象且统一的驱动框架,复杂了,也为标准化
CONFIG_BAUDRATE, 默认串口波特率
CONFIG_SERIAL_PRESENT,存在串口
CONFIG_DM_VIDEO,
未定义:
CONFIG_OF_SEPARATE:dts与uboot分开,一般不用
CONFIG_TIMER_EARLY:尽早使用timer
CONFIG_BOARD_EARLY_INIT_F: 早期board初始化,给board提供一个hook
CONFIG_SYSRESET
CONFIG_DISPLAY_CPUINFO
CONFIG_DISPLAY_BOARDINFO
CONFIG_SYS_I2C
CONFIG_SYS_DRAM_TEST
CONFIG_SYS_MEM_TOP_HIDE: 让uboot对上面的内存不可见,将ram_size -= CONFIG_SYS_MEM_TOP_HIDE
CONFIG_SYS_SDRAM_BASE: DDR的起始地址,没啥意义,0
CONFIG_PRAM: protected RAM, 可以预留一段不被uboot使用
CONFIG_SYS_NONCACHED_MEMORY:分配non-cache区域
board_init_f()直接执行init_sequence_f[]里的若干函数,黄底层为board移植时一般需要实现的。
- setup_mon_len(), gd->mon_len = 整个程序大小(text/data/bss等)
- fdtdec_setup(),gd->fdt_blob = __dtb_dt_begin,dts用
- initf_malloc(), 初始化gd的malloc相关成员,gd->malloc_limit和gd->malloc_ptr
- log_init(),log相关初始化,暂不关注
- initf_bootstage(),初始化bootstage功能,用于标记启动到哪个阶段了
- arch_cpu_init(),cpu级别的初始化操作,可以在需要的时候由CPU有关的code实现,weak实现啥也没干
- mach_cpu_init(), SoC/machine级别初始化,在mach_***里可以覆盖weak实现
- initf_dm(), driver model有关的初始化操作
- arch_cpu_init_dm(), cpu相关的dm初始化
- board_early_init_f(), 早期board级初始化,一般没用
- timer_init(), timer初始化
- env_init,environment系统初始化
- init_baud_rate,gd->baudrate = env_get_ulong("baudrate", 10, CONFIG_BAUDRATE),优先从环境变量“baudrate”中获取
- serial_init, 初始化串口,之后串口可用
- console_init_f
- display_options,显示版本信息等
- display_text_info,进一步显示信息
- checkcpu
- announce_dram_init,打印一句话
- dram_init, ddr初始化,如果其他boot已经初始化了,初始化gd->ram_size = ***
- testdram, dram测试
- 后面是重定位后的地址分配相关内容,分配空间的函数以reserve_***开头,见下图
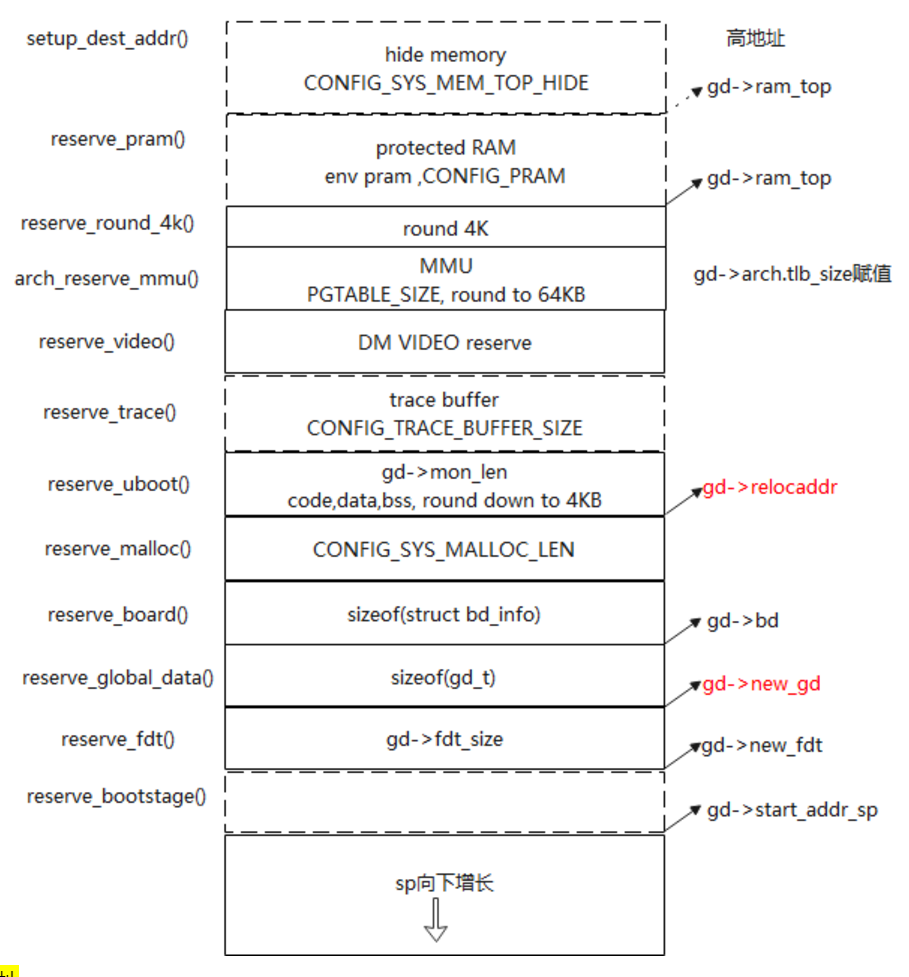
uboot把自己重定位到高地址,linux启动后在低地址 - dram_init_banksize(),设置:
gd->bd->bi_dram[bank].start
gd->bd->bi_dram[bank].size
gd->ram_size
gd->ram_base
- show_dram_config(), 显示dram信息
- setup_bdinfo(), bd->bi_memstart和bd->bi_memsize
- display_new_sp(), 显示sp
- reloc_fdt(),reloc_bootstage(), reloc_bloblist(),如果定义了相关宏,则把对应内容放到上面图中对位的位置
- setup_reloc(), 计算gd->reloc_off,将gd拷贝到新地址
3.4 relocate
- relocate的历史:可能是早期SOC,uboot可能在ROM中执行,效率低,所以要拷贝到RAM里,虽然当前SOC, 一般UBOOT在一开始就在RAM里了,但relocate这个环节被保留了。
- arch/arm/lib/relocate_64.S, 对text、data、rel_dyn做重定位处理,返回时,已经在新地址运行了。
- relocate是uboot比较难理解的部分,需要一些基础知识。

1.每个func后面有label,PC+offset找labal;2.label中存全局变量地址;3.func后面的label作为text段的一部分; 4.rel_dyn段再保存所有label的地址;5.重定位时从rel_dyn段找lable地址,再修改lable里的内容,即修改了全局变量的地址 - rel_dyn里保存的数据格式(arm64)
-objdump -D u-boot > uboot_objdump.txt可得:
Disassembly of section .rela.dyn:
00000000000f6940 <__image_copy_end>:
...
f6970: 00082ad0 .inst 0x00082ad0 ; undefined
f6974: 00000000 udf #0 // 8B, lable 地址
f6978: 00000403 udf #1027
f697c: 00000000 udf #0 // 8B, 标记
f6980: 00102070 .inst 0x00102070 ; undefined
f6984: 00000000 udf #0 // 8B, lable中保存的数据,即地址0x00082ad0里保存的值(全局变量地址)
...
f69a0: 000d71b8 .inst 0x000d71b8 ; undefined
f69a4: 00000000 udf #0
f69a8: 00000403 udf #1027
f69ac: 00000000 udf #0
f69b0: 000e85e6 .inst 0x000e85e6 ; undefined
f69b4: 00000000 udf #0
rel_dyn的格式为:
long lable_addr; label地址
long flag = 1027;
long val_in_lable; labal里存的内容,即全局变量地址
所以rel_dyn重定位就很简单了, [lable_addr + rel_off] = val_in_lable + rel_off,, 段.rela.dyn本身没有拷贝,重定位后就不用了。
源码分析:
/*
* void relocate_code(addr_moni)
*
* This function relocates the monitor code.
* x0 holds the destination address.
*/
ENTRY(relocate_code)
stp x29, x30, [sp, #-32]! /* create a stack frame */
mov x29, sp
str x0, [sp, #16]
/*
* Copy u-boot from flash to RAM
* __image_copy_start = _TEXT_BASE = CONFIG_SYS_TEXT_BASE = 0x80000, 初始加载地址
*/
adrp x1, __image_copy_start /* x1 <- address bits [31:12] */
add x1, x1, :lo12:__image_copy_start/* x1 <- address bits [11:00] */
subs x9, x0, x1 /* x9 <- Run to copy offset, X9 = 重定位前后地址的offset */
b.eq relocate_done /* skip relocation */
/*
* Don't ldr x1, __image_copy_start here, since if the code is already
* running at an address other than it was linked to, that instruction
* will load the relocated value of __image_copy_start. To
* correctly apply relocations, we need to know the linked value.
*
* Linked &__image_copy_start, which we know was at
* CONFIG_SYS_TEXT_BASE, which is stored in _TEXT_BASE, as a non-
* relocated value, since it isn't a symbol reference.
*/
ldr x1, _TEXT_BASE /* x1 <- Linked &__image_copy_start */
subs x9, x0, x1 /* x9 <- Link to copy offset, X9 = 重定位前后地址的offset */
adrp x1, __image_copy_start /* x1 <- address bits [31:12] */
add x1, x1, :lo12:__image_copy_start/* x1 <- address bits [11:00] */
adrp x2, __image_copy_end /* x2 <- address bits [31:12] */
add x2, x2, :lo12:__image_copy_end /* x2 <- address bits [11:00] */
copy_loop:
ldp x10, x11, [x1], #16 /* copy from source address [x1] */
stp x10, x11, [x0], #16 /* copy to target address [x0] */
cmp x1, x2 /* until source end address [x2] */
b.lo copy_loop
str x0, [sp, #24]
/* 上面代码完成__image_copy_start、__image_copy_end之间的代码拷贝,包括text和data段 */
/*
* Fix .rela.dyn relocations
* rela.dyn里1个LABEL结构是:
* 8 Bytes 地址
* 8 Bytes 标记
* 8 Bytes addend
*/
adrp x2, __rel_dyn_start /* x2 <- address bits [31:12] */
add x2, x2, :lo12:__rel_dyn_start /* x2 <- address bits [11:00] */
adrp x3, __rel_dyn_end /* x3 <- address bits [31:12] */
add x3, x3, :lo12:__rel_dyn_end /* x3 <- address bits [11:00] */
fixloop:
ldp x0, x1, [x2], #16 /* (x0,x1) <- (SRC location, fixup), X0是label地址,X1存标记 */
ldr x4, [x2], #8 /* x4 <- label地址里的值 */
and x1, x1, #0xffffffff
cmp x1, #R_AARCH64_RELATIVE
bne fixnext
/* relative fix: store addend plus offset at dest location */
add x0, x0, x9
add x4, x4, x9
str x4, [x0] /* label值 + offset = lable里的值(全局变量地址) +offset */
fixnext:
cmp x2, x3
b.lo fixloop
relocate_done:
switch_el x1, 3f, 2f, 1f
bl hang
3: mrs x0, sctlr_el3
b 0f
2: mrs x0, sctlr_el2
b 0f
1: mrs x0, sctlr_el1
0: tbz w0, #2, 5f /* skip flushing cache if disabled */
tbz w0, #12, 4f /* skip invalidating i-cache if disabled */
ic iallu /* i-cache invalidate all */
isb sy
4: ldp x0, x1, [sp, #16]
bl __asm_flush_dcache_range
bl __asm_flush_l3_dcache
5: ldp x29, x30, [sp],#32
ret
ENDPROC(relocate_code)
3.5 board_init_r()
3.5.1 init_sequence_r
relocate之后的初始化及主函数,执行init_sequence_r[]里的函数指针。
- initr_trace,初始化并使能u-boot的tracing system,涉及的配置项有CONFIG_TRACE。
- initr_reloc,设置relocation完成的标志。
- initr_caches,使能dcache、icache等,涉及的配置项有CONFIG_ARM。
- initr_reloc_global_data(), 重定位gd相关内容,gd->env_addr,gd->fdt_blob,efi相关初始化
- initr_malloc,malloc有关的初始化
- log_init, log相关初始化
- initr_dm, relocate之后,重新初始化DM,涉及的配置项有CONFIG_DM
- board_init,具体的板级初始化,需要由board代码根据需要实现,涉及的配置项有CONFIG_ARM。
- set_cpu_clk_info,Initialize clock framework,涉及的配置项有CONFIG_CLOCKS。
- efi_memory_init, efi相关初始化
- initr_binman() ?
- initr_dm_devices, CONFIG_TIMER_EARLY决定是否初始化timer
- stdio_init_tables
- serial_initialize
- initr_announce, 打印
- board_early_init_r, CONFIG_BOARD_EARLY_INIT_R控制是否调用,板级实现
- arch_early_init_r,由arch代码实现,涉及的配置项有CONFIG_ARCH_EARLY_INIT_R。
- power_init_board,板级的power init代码,由板级代码实现,例如hold住power。
- initr_flash,initr_nand,initr_onenand,initr_mmc,根据各宏调用各存储设备初始化
- initr_env, 环境变量相关初始化
- initr_secondary_cpu,其他core初始化
- stdio_add_devices,各种输入输出设备的初始化,如LCD driver等
- initr_jumptable ?
- console_init_r
- arch_misc_init, 受CONFIG_ARCH_MISC_INIT控制的arch杂项
- misc_init_r, 受CONFIG_MISC_INIT_R控制
- interrupt_init, 使能中断
- initr_status_led,状态指示LED的初始化,涉及的配置项有CONFIG_STATUS_LED、STATUS_LED_BOOT。
- initr_ethaddr,Ethernet的初始化,涉及的配置项有CONFIG_CMD_NET。
- board_late_init, 由板级代码实现,涉及的配置项有CONFIG_BOARD_LATE_INIT
- initr_net。网络初始化,CONFIG_CMD_NET
- run_main_loop/main_loop,主循环
3.5.2 main_loop

参考
http://www.wowotech.net/u-boot/boot_flow_1.html
https://blog.csdn.net/skyflying2012/article/details/37660265
https://blog.csdn.net/ooonebook/article/details/53047992
uboot1: 启动流程和移植框架的更多相关文章
- u-boot 编译,启动流程分析,移植
分析u-boot-1.1.6 的启动流程 移植u-boot 2012.04版本到JZ2440开发板 源码百度云链接:https://pan.baidu.com/s/10VnxfDWBqJVGY3SCY ...
- 从0移植uboot (二) _uboot启动流程分析
经过了上一篇的配置,我们已经执行make就可以编译出一个uboot.bin,但这还不够,首先,此时的uboot并不符合三星芯片对bootloader的格式要求,同时,此时的uboot.bin也没有结合 ...
- [Abp vNext 源码分析] - 1. 框架启动流程分析
一.简要说明 本篇文章主要剖析与讲解 Abp vNext 在 Web API 项目下的启动流程,让大家了解整个 Abp vNext 框架是如何运作的.总的来说 ,Abp vNext 比起 ABP 框架 ...
- [Abp 源码分析]一、Abp 框架启动流程分析
Abp 不一定仅用于 Asp.Net Core 项目,他也可以在 Console 与 WinFrom 项目当中进行使用,所以关于启动流程可以分为两种,一种是 Asp.Net Core 项目的启动流程, ...
- ThinkPHP5.0源码学习之框架启动流程
ThinkPHP5框架的启动流程图如下: ThinkPHP5的启动流程按照文件分为三步: 1.请求入口(public/index.php) 2.框架启动(thinkphp/start.php) 3.应 ...
- linux 内核启动流程分析,移植
分析 linux-2.6.22.6 内核启动流程 移植 linux-3.4.2 到 JZ2440 开发板 Linux内核源码百度云链接: https://pan.baidu.com/s/1m1ymGl ...
- u-boot移植随笔(7):u-boot启动流程简图【转】
转自:http://www.latelee.org/porting-uboot/u-boot-porting-bootstrap.html u-boot移植随笔:u-boot启动流程简图 画上面这张图 ...
- 菜鸟nginx源代码剖析 框架篇(一) 从main函数看nginx启动流程
菜鸟nginx源代码剖析 框架篇(一) 从main函数看nginx启动流程 Author:Echo Chen(陈斌) Email:chenb19870707@gmail.com Blog:Blog.c ...
- (转)从0移植uboot (二) _uboot启动流程分析
ref:https://www.cnblogs.com/xiaojiang1025/p/6496704.html 经过了上一篇的配置,我们已经执行make就可以编译出一个uboot.bin,但这还不够 ...
随机推荐
- HiveHA机制源码分析
hive让大数据飞了起来,不再需要专人写MR.平常我们都可以用基于thrift的任意语言来调用hive. 不过爱恨各半,hive的thrift不稳定也是出了名的.很容易就出问题,让人无计可施.唯一的办 ...
- Sentry-JS-SDK-Browser 官方示例最佳实践
系列 SDK 开发 顶级开源项目 Sentry 20.x JS-SDK 设计艺术(理念与设计原则篇) 顶级开源项目 Sentry 20.x JS-SDK 设计艺术(开发基础篇) 顶级开源项目 Sent ...
- 【linux】系统编程-4-共享内存
目录 前言 6. 共享内存 6.1 概念 6.2 操作函数 6.2.1 shmget() 6.2.2 shmat() 6.2.3 shmdt() 6.2.4 shmctl() 6.3 例子 参考: 前 ...
- 在docker容器中使用cplex-python37
技术背景 线性规划是常见的问题求解形式,可以直接跟实际问题进行对接,包括目标函数的建模和各种约束条件的限制等,最后对参数进行各种变更,以找到满足约束条件情况下可以达到的最优解.Cplex是一个由IBM ...
- Web 前端 - 优雅地 Callback 转 Promise :aw
前言 当今 ES7 标准大行其道,使用 async + await 将异步逻辑同步书写已经普及,但是却有许多旧库或旧代码尚未完全 Promise 化,急需一个小工具去挖去这代码中藓疾. 设计和实现 由 ...
- 痞子衡嵌入式:关于恩智浦入驻B站的一些思考
故事起源于这周五的一封公司邮件,标题是"恩智浦B站首支原创视频播放量破万",公司Marcom部门特地群发了这个邮件给全体员工,并鼓励大家积极DIY工作相关的有趣视频,为公司这个萌新 ...
- Python常用时间转换
1 import time 2 import math 3 4 # 定义一些时间段的常量(秒) 5 TimeSec_Hour = 3600 6 TimeSec_Day = 86400 7 TimeSe ...
- APP或者前端通过识别用户代理详细信息和浏览器数据进行安全防御
使用用户代理解析API 识别 访问您网站的浏览器,机器人,操作系统和设备 上手免费 阅读文档 解码用户代理 识别检测浏览器,操作系统,平台,设备类型以及其他30多个字段 多种浏览器,机器人,手机,平板 ...
- 《构建之法》& CI/CD调研
项目 内容 这个作业属于哪个课程 2021春季软件工程(罗杰 任健) 这个作业的要求在哪里 2021年软工-个人阅读作业2 我在这个课程的目标是 提升软件开发能力与团队意识 这个作业在哪个具体方面帮助 ...
- Java代码度量分析工具:DesigniteJava简介
前言 在Java面向对象课程的学习过程中,我们需要使用度量工具来分析自己程序的代码结构.受OO课程组以及前辈们博客提醒,笔者找到了DesigniteJava这款软件,现对此软件进行简单的说明. 一.D ...