[论文理解] LFFD: A Light and Fast Face Detector for Edge Devices
LFFD: A Light and Fast Face Detector for Edge Devices
摘要
从微信推文中得知此人脸识别算法可以在跑2K图片90fps,仔细一看是在RTX2070下使用tensorrt下才能达到。最近刚好有个目标检测的任务,检测的目的其实差不多,我们篮球组比赛中需要检测篮球和排球,传统方法的鲁棒性不好,因此拟打算用自己写个神经网络结构在nuc x86 cpu下能够取得不错的推理速度和准确率。所以准备参考这篇论文复现并修改实现篮球、排球的实时目标检测任务。
本文提出了轻量级的人脸检测算法,可以达到2K图片90FPS(广告),本文的大体框架是借鉴SSD目标检测框架的,但是却是一个anchor free的人脸检测框架,因为作者认为感受野本身就是天然的anchor,所以作者通过精细设计感受野完成了本篇的人脸检测任务。认为浅层layer的有效感受野应该与小目标size比值较大,这样可以充分利用周围特征对人脸检测的贡献;深层layer由于其感受野比较大,检测大目标,大目标人脸本身有足够的鼻子、眼镜等信息可以帮助判别人脸,所以不需要太大的有效感受野与人脸比例。根据这些想法,作者设计了本文的人脸检测网络结构。
感受野和有效感受野
感受野通俗讲就是feature map上一个点对应原图的一片pixel区域,计算方法也比较简单,我自己简单写了一下。

总结起来公式就是
\[
RF_{i} = RF_{i-1} + (k-1)S\\
其中k为i-1层到i层的kernel size,S为全局stride
\]
其实对于感受野而言,并不是感受野内的所有点都对后面结果起到决定性作用,而是以感受野中心呈高斯分布的区域内的点对后面结果起到关键作用,这区域称为有效感受野ERF。
据此作者得出下面三个对人脸识别很有帮助的结论:
- 对于人脸小目标来说,ERF最好能尽可能覆盖context information
- 对于中等人脸,ERF只需要覆盖一部分context information
- 对于大人脸目标,ERF甚至不需要覆盖其他额外的context information
网络结构

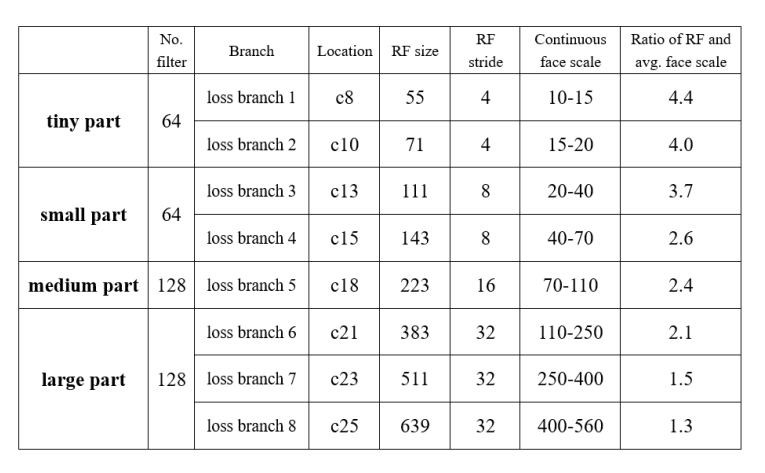
作者认为RF就是天然的anchor,由于人脸目标一般是方的,所以不需要考虑各种比例的box。在box匹配的时候,作者认为rf中心落在gt内的box为正样本,同时落在多个gt中的box为负样本、其他没有落在任何gt中的box也为负样本。此外,作者定义的gray scale,后面再提。
对于这样的网络设计,作者是这么想的:
100 pixels的RF的有效感受野为20-40pixels,所以作者就分了四个part,tiny part的c8 RF SIZE为55,去检测10-15pixels的人脸,c10检测15-20,以此类推。其中rf与avg face scale的比值随着层数加深而减少,高层大感受野预测大目标就不需要太多的context information,前面讲了。
网络实现中全用的3*3和1*1的卷积核,实现起来很简单。data augmentation用了 color distort、Random sampling for each scale和Randomly horizontal flip。
loss是regression loss和classification loss加权和。
regression loss直接简单粗暴L2loss,预测相对值:
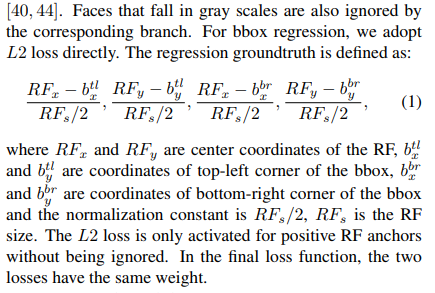
classification loss是crossentropy loss。
box匹配的时候定义了gray scale,认为处于gray scale的box也应该为负样本。
对c13出的box而言,其检测的人脸像素为20-40pixels,认为[18,20]以及[40,44]像素的人脸不被c13预测,这是因为这些人脸属于hard目标,网络往往只能看到局部特征,很难判别,所以c13这个brach不预测他,让别的branch预测,对训练有好处。
此外还用了负样本挖掘(sort负样本的loss,选择loss比较大的一部分训练,其他不参与梯度反传,加速收敛)。
训练参数:
xavier初始化、图像标准化x-127.5/127.5、sgd 0.9 momentum,0weight decay,init lr0.1.
1080ti训练了5天。
后续
复现并修改后的BasketNet:https://github.com/aoru45/BasketNet
论文:https://arxiv.org/pdf/1904.10633.pdf
[论文理解] LFFD: A Light and Fast Face Detector for Edge Devices的更多相关文章
- 论文阅读(XiangBai——【AAAI2017】TextBoxes_A Fast Text Detector with a Single Deep Neural Network)
XiangBai——[AAAI2017]TextBoxes:A Fast Text Detector with a Single Deep Neural Network 目录 作者和相关链接 方法概括 ...
- [论文理解]关于ResNet的进一步理解
[论文理解]关于ResNet的理解 这两天回忆起resnet,感觉残差结构还是不怎么理解(可能当时理解了,时间长了忘了吧),重新梳理一下两点,关于resnet结构的思考. 要解决什么问题 论文的一大贡 ...
- [论文理解] CornerNet: Detecting Objects as Paired Keypoints
[论文理解] CornerNet: Detecting Objects as Paired Keypoints 简介 首先这是一篇anchor free的文章,看了之后觉得方法挺好的,预测左上角和右下 ...
- XiangBai——【AAAI2017】TextBoxes_A Fast Text Detector with a Single Deep Neural Network
XiangBai--[AAAI2017]TextBoxes:A Fast Text Detector with a Single Deep Neural Network 目录 作者和相关链接 方法概括 ...
- [论文理解] Receptive Field Block Net for Accurate and Fast Object Detection
Receptive Field Block Net for Accurate and Fast Object Detection 简介 本文在SSD基础上提出了RFB Module,利用神经科学的先验 ...
- Fast R-CNN论文理解
论文地址:https://arxiv.org/pdf/1504.08083.pdf 翻译请移步:https://blog.csdn.net/ghw15221836342/article/details ...
- [论文理解] Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks 简介 Faster R-CNN是很经典的t ...
- [论文理解]Selective Search for Object Recognition
Selective Search for Object Recognition 简介 Selective Search是现在目标检测里面非常常用的方法,rcnn.frcnn等就是通过selective ...
- R-FCN论文理解
一.R-FCN初探 1. R-FCN贡献 提出Position-sensitive score maps来解决目标检测的位置敏感性问题: 区域为基础的,全卷积网络的二阶段目标检测框架: 比Faster ...
随机推荐
- java.lang.StackOverflowError解决
在使用JPA的仓储repository进行查询时,经常用到findAllbyId的方法: repository.findAllbyId() 但如果像下面的代码,当list的size量太大的话,就会报栈 ...
- openCV 二 图像处理
官网:https://docs.opencv.org/3.2.0/df/d9d/tutorial_py_colorspaces.html 改变颜色空间 本教程颜色空间转换:BGR ↔ Gray and ...
- 官宣!VS Code Python 全新功能在 PyCon China 全球首发!
北京时间 2019 年 9 月 21 日,PyCon China 2019 在上海举行. 在下午的演讲中,来自微软开发工具事业部的资深研发工程师 在演讲中,我们看到了 Azure Notebook 与 ...
- ERP和MES系统的区别和关系?
1.ERP和MES的区别:ERP(Enterprise Resources Planning)是企业资源计划,它是在物料需求计划MRP(Material Requirement Planning)和制 ...
- python实现策略模式
python实现策略模式 原文地址 1.策略模式概述 策略模式:定义一系列算法,把它们一一封装起来,并且使它们之间可以相互替换.此模式让算法的变化不会影响到使用算法的客户. 电商领域有个使用“策略”模 ...
- 初探html-9 链接
HTML 链接 HTML 使用超级链接与网络上的另一个文档相连.几乎可以在所有的网页中找到链接.点击链接可以从一张页面跳转到另一张页面. 尝试一下 - 实例 <!DOCTYPE html> ...
- python语音提示
#coding:utf8 import win32com.client speaker = win32com.client.Dispatch("SAPI.SpVoice") whi ...
- python中的正则表达式的使用
一.正则表达式简介 正则表达式的官方文档:https://www.runoob.com/regexp/regexp-tutorial.html 正则表达式:又称正规表示式.正规表示法.正规表达式.规则 ...
- IBM小机拆镜像换盘
1.硬盘告警信息 2.故障排查 查看错误日志 # errpt -aj C62E1EB7 查看hdisk0的信息,发现hdisk0属于rootvg # lspv 查看hdi ...
- [DllImport("kernel32.dll")]使用
C#中读取ini配置文件 [DllImport("kernel32.dll")] using System;using System.Collections.Generic;usi ...