matlab练习程序(点云表面法向量)
思路还是很容易想到的:
1.首先使用KD树寻找当前点邻域的N个点,这里取了10个,直接调用了vlfeat。
2.用最小二乘估计当前邻域点组成的平面,得到法向量。
3.根据当前邻域点平均值确定邻域质心,通常质心会在弯曲表面的内部,反方向即为法线方向。
vlfeat在这里下载,配置参考这里,rabbit.pcd下载地址
处理效果如下:
原始点云:
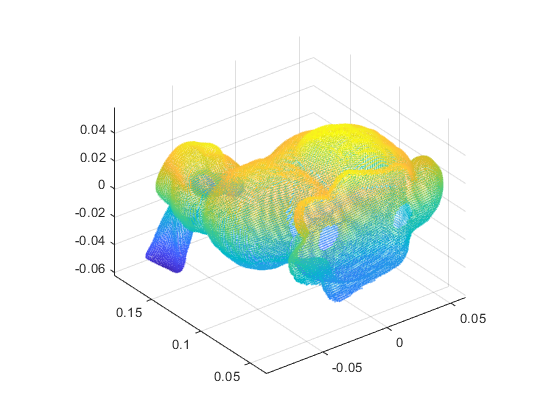
点云表面法向量,做了降采样处理:
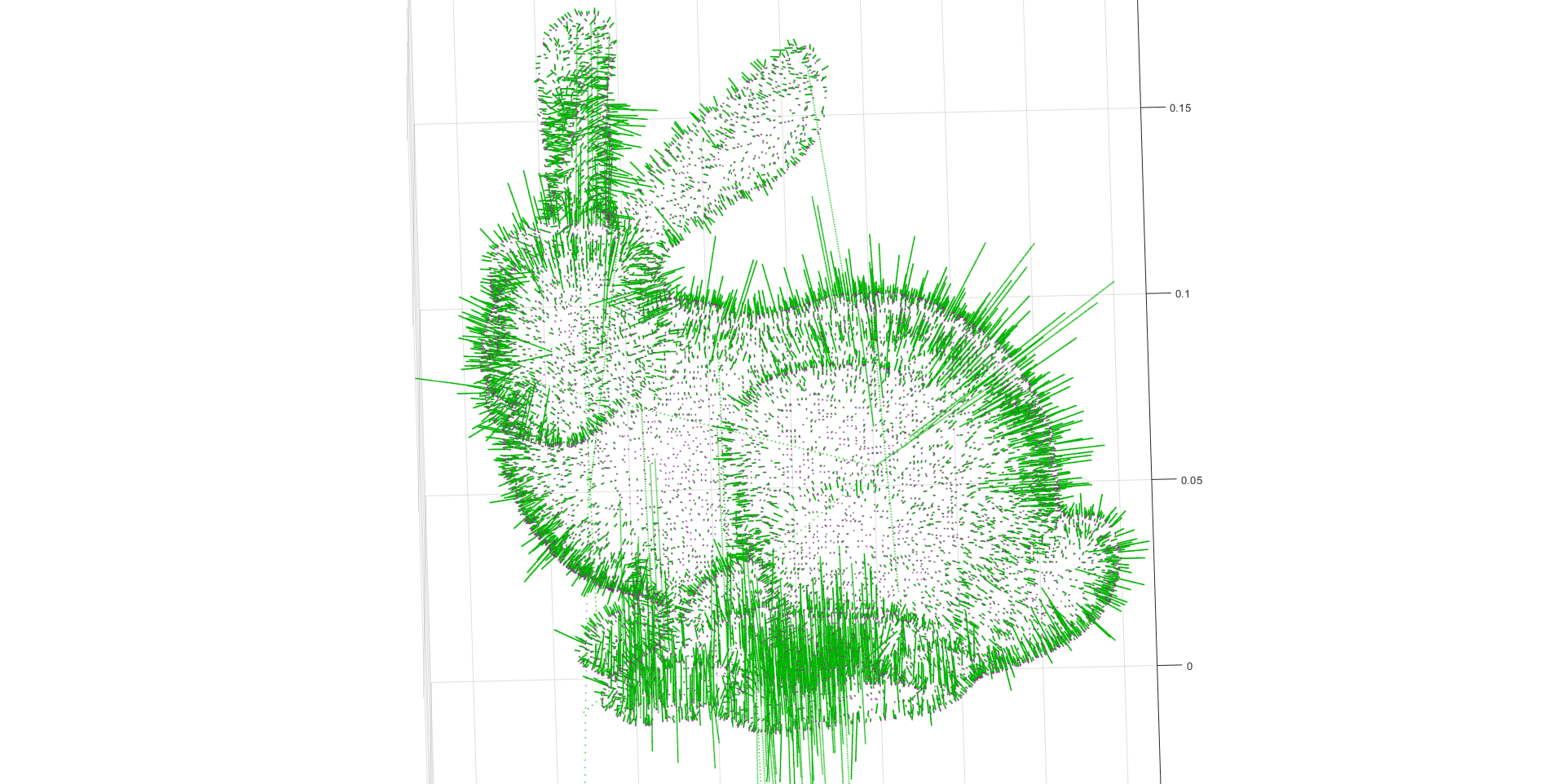
兔子果断变刺猬。
matlab代码如下:
clear all;
close all;
clc;
warning off; pc = pcread('rabbit.pcd');
pc=pcdownsample(pc,'random',0.3); %0.3倍降采样
pcshow(pc); pc_point = pc.Location'; %得到点云数据
kdtree = vl_kdtreebuild(pc_point); %使用vlfeat建立kdtree normE=[];
for i=:length(pc_point) p_cur = pc_point(:,i);
[index, distance] = vl_kdtreequery(kdtree, pc_point, p_cur, 'NumNeighbors', ); %寻找当前点最近的10个点
p_neighbour = pc_point(:,index)';
p_cent = mean(p_neighbour); %得到局部点云平均值,便于计算法向量长度和方向 %最小二乘估计平面
X=p_neighbour(:,);
Y=p_neighbour(:,);
Z=p_neighbour(:,);
XX=[X Y ones(length(index),)];
YY=Z;
%得到平面法向量
C=(XX'*XX)\XX'*YY; %局部平面指向局部质心的向量
dir1 = p_cent-p_cur';
%局部平面法向量
dir2=[C() C() -]; %计算两个向量的夹角
ang = sum(dir1.*dir2) / (sqrt(dir1()^ +dir2()^) + sqrt(dir1()^ +dir2()^)+sqrt(dir1()^ +dir2()^) ); %根据夹角判断法向量正确的指向
flag = acos(ang);
dis = norm(dir1);
if flag<
dis = -dis;
end %画出当前点的表面法向量
t=(:dis/:dis)';
x = p_cur() + C()*t;
y = p_cur() + C()*t;
z = p_cur() + (-)*t; normE =[normE;x y z];
i
end
pcshowpair(pc,pointCloud(normE));
matlab练习程序(点云表面法向量)的更多相关文章
- matlab练习程序(SUSAN检测)
matlab练习程序(SUSAN检测) SUSAN算子既可以检测角点也可以检测边缘,不过角点似乎比不过harris,边缘似乎比不过Canny.不过思想还是有点意思的. 主要思想就是:首先做一个和原图像 ...
- (转)matlab练习程序(HOG方向梯度直方图)
matlab练习程序(HOG方向梯度直方图)http://www.cnblogs.com/tiandsp/archive/2013/05/24/3097503.html HOG(Histogram o ...
- 微信小程序之云开发一
最近听说微信小程序发布了云开发,可以不需要购买服务器,就能开发小程序和发布小程序,对于动辄千元的服务器,极大的节约了开发成本,受不住诱惑,我就开始了小程序的云开发,目前项目已上线,亲测不收费,闲不住的 ...
- 微信小程序与云开发
微信小程序基础概念 小程序云开发的三大基础能力:云数据库.云函数.云存储 Java.NodeJS.JavaScript.HTML5.CSS3.VueJs.ReactJs.前端工程化.前端架构 小程序开 ...
- 小程序接入云通信IM
小程序接入云通信IM--插件 小程序微信后台搜索AI情报官组件即可获得小程序云通信IM的即时通信能力
- 微信小程序--使用云开发完成支付闭环
微信小程序--使用云开发完成支付闭环 1.流程介绍 2. 代码实现和逻辑思想描述 云函数统一下单 对应云函数 unipay [CloudPay.unifiedOrder] 函数思路 : 调用云函数封装 ...
- Slog71_选取、上传和显示本地图片GET !(微信小程序之云开发-全栈时代3)
ArthurSlog SLog-71 Year·1 Guangzhou·China Sep 12th 2018 ArthurSlog Page GitHub NPM Package Page 掘金主页 ...
- matlab练习程序(点云下采样)
点云处理有时因为数据量太大,我们需要对其进行下采样. 这里的方法是先将点云填入固定大小的三维网格中,然后每个网格中选一个点生成新的点云. 新点云即为下采样后的点云. 这里使用斯坦福兔子作为测试点云. ...
- matlab练习程序(图像投影到点云)
最近接触点云比较多,如果把图像投影到点云应该挺有意思. 首先需要载入图像,然后做个球或其他什么形状的点云,这里可以参考球坐标公式. 最后通过pcshow将像素输出到点云上即可. 原图: 投影后的点云: ...
随机推荐
- pyinstaller安装配置
一.工具准备: 1).安装pyinstaller需要以这个包为基础.也就是基础软件包.pyWin32包.下载对应的pyWin32安装包>>地址: https://sourceforge.n ...
- [java]创建一个默认TreeMap() key为什么不能为null
本文版权归 远方的风lyh和博客园共有,欢迎转载,但须保留此段声明,并给出原文链接,谢谢合作. 先看一下 TreeMap 的 put(K key, V value) public TreeMap() ...
- Django使用Channels实现WebSocket--下篇
希望通过对这两篇文章的学习,能够对Channels有更加深入的了解,使用起来得心应手游刃有余 通过上一篇<Django使用Channels实现WebSocket--上篇>的学习应该对Cha ...
- 【深度学习与TensorFlow 2.0】入门篇
注:因为毕业论文需要用到相关知识,借着 TF 2.0 发布的时机,重新捡起深度学习.在此,也推荐一下优达学城与 TensorFlow 合作发布的TF 2.0入门课程,下面的例子就来自该课程. 原文发布 ...
- 一文带你学会使用YOLO及Opencv完成图像及视频流目标检测(上)|附源码
计算机视觉领域中,目标检测一直是工业应用上比较热门且成熟的应用领域,比如人脸识别.行人检测等,国内的旷视科技.商汤科技等公司在该领域占据行业领先地位.相对于图像分类任务而言,目标检测会更加复杂一些,不 ...
- 项目实战4—HAProxy实现高级负载均衡实战和ACL控制
haproxy实现高级负载均衡实战 环境:随着公司业务的发展,公司负载均衡服务已经实现四层负载均衡,但业务的复杂程度提升,公司要求把mobile手机站点作为单独的服务提供,不在和pc站点一起提供服务 ...
- 解读经典《C#高级编程》第七版 Page68-79.对象和类型.Chapter3
前言 新年好,本篇开始进入第三章,<对象和类型>,深刻理解C#的对象,对于使用好.Net类库非常重要. 01 类和结构 从使用角度看,结构和类的区别很小,比如,将结构定义转换为类,只需要将 ...
- DLCI 简介
数据链路连接标识(Data Link Connection Identifier) 帧中继协议是一种统计复用的协议,它在单一物理传输线路上能够提供多条虚电路.每条虚电路都是用DLCI(Data Lin ...
- 【golang-GUI开发】struct tags系统(二)qt的自定义组件和构造函数
今天我们来讲讲自定义组件和它的构造函数. 在前面的文章里我们已经接触了好几个自定组件,这次的示例是一个自定义对话框,他有一个about按钮,点击按钮可以显示出Qt的信息或者用户输入的信息.这是效果图: ...
- Java 数组声明的几种方式
Java数组定义声明的几种方法: 1. 类型名称[] 变量名=new 类型名称[length]; 2.类型名称[] 变量名={?,?,?}; 3.类型名称[] 变量名=new 类型名称[]{?,?,? ...