A/D和D/A的学习
17.1 A/D和D/A的基本概念
A/D是模拟量到数字量的转换,依靠的是模数转换器(Analog to Digital Converter),简称ADC;D/A是数字量到模拟量的转换,依靠的是数模转换器(Digital to Analog Converter),简称DAC。他们的道理是完全一样的,只是转换方向不同,因此我们讲解过程主要以A/D为例来讲解。
17.2 A/D的主要指标
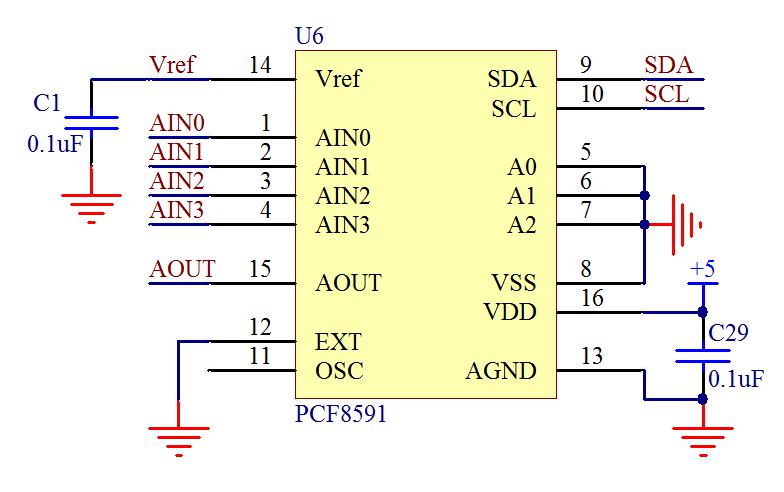
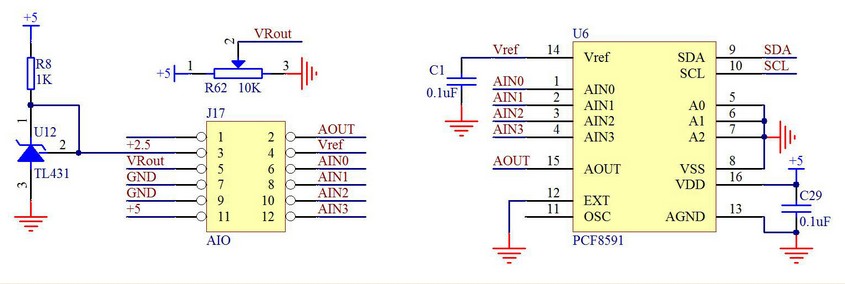
17.3 PCF8591的硬件接口
17.4 PCF8591的软件编程

/***********************lcd1602.c文件程序源代码*************************/
#include <reg52.h> #define LCD1602_DB P0 sbit LCD1602_RS = P1^;
sbit LCD1602_RW = P1^;
sbit LCD1602_E = P1^; void LcdWaitReady() //等待液晶准备好
{
unsigned char sta; LCD1602_DB = 0xFF;
LCD1602_RS = ;
LCD1602_RW = ;
do
{
LCD1602_E = ;
sta = LCD1602_DB; //读取状态字
LCD1602_E = ;
} while (sta & 0x80); //bit7等于1表示液晶正忙,重复检测直到其等于0为止
}
void LcdWriteCmd(unsigned char cmd) //写入命令函数
{
LcdWaitReady();
LCD1602_RS = ;
LCD1602_RW = ;
LCD1602_DB = cmd;
LCD1602_E = ;
LCD1602_E = ;
}
void LcdWriteDat(unsigned char dat) //写入数据函数
{
LcdWaitReady();
LCD1602_RS = ;
LCD1602_RW = ;
LCD1602_DB = dat;
LCD1602_E = ;
LCD1602_E = ;
}
void LcdShowStr(unsigned char x, unsigned char y, const unsigned char *str) //显示字符串,屏幕起始坐标(x,y),字符串指针str
{
unsigned char addr; //由输入的显示坐标计算显示RAM的地址
if (y == )
addr = 0x00 + x; //第一行字符地址从0x00起始
else
addr = 0x40 + x; //第二行字符地址从0x40起始 //由起始显示RAM地址连续写入字符串
LcdWriteCmd(addr | 0x80); //写入起始地址
while (*str != '\0') //连续写入字符串数据,直到检测到结束符
{
LcdWriteDat(*str);
str++;
}
}
void LcdInit() //液晶初始化函数
{
LcdWriteCmd(0x38); //16*2显示,5*7点阵,8位数据接口
LcdWriteCmd(0x0C); //显示器开,光标关闭
LcdWriteCmd(0x06); //文字不动,地址自动+1
LcdWriteCmd(0x01); //清屏
}
/***********************I2C.c文件程序源代码*************************/
#include <reg52.h>
#include <intrins.h> #define I2CDelay() {_nop_();_nop_();_nop_();_nop_();} sbit I2C_SCL = P3^;
sbit I2C_SDA = P3^; void I2CStart() //产生总线起始信号
{
I2C_SDA = ; //首先确保SDA、SCL都是高电平
I2C_SCL = ;
I2CDelay();
I2C_SDA = ; //先拉低SDA
I2CDelay();
I2C_SCL = ; //再拉低SCL
}
void I2CStop() //产生总线停止信号
{
I2C_SCL = ; //首先确保SDA、SCL都是低电平
I2C_SDA = ;
I2CDelay();
I2C_SCL = ; //先拉高SCL
I2CDelay();
I2C_SDA = ; //再拉高SDA
I2CDelay();
}
bit I2CWrite(unsigned char dat) //I2C总线写操作,待写入字节dat,返回值为应答状态
{
bit ack; //用于暂存应答位的值
unsigned char mask; //用于探测字节内某一位值的掩码变量 for (mask=0x80; mask!=; mask>>=) //从高位到低位依次进行
{
if ((mask&dat) == ) //该位的值输出到SDA上
I2C_SDA = ;
else
I2C_SDA = ;
I2CDelay();
I2C_SCL = ; //拉高SCL
I2CDelay();
I2C_SCL = ; //再拉低SCL,完成一个位周期
}
I2C_SDA = ; //8位数据发送完后,主机释放SDA,以检测从机应答
I2CDelay();
I2C_SCL = ; //拉高SCL
ack = I2C_SDA; //读取此时的SDA值,即为从机的应答值
I2CDelay();
I2C_SCL = ; //再拉低SCL完成应答位,并保持住总线 return (~ack); //应答值取反以符合通常的逻辑:0=不存在或忙或写入失败,1=存在且空闲或写入成功
}
unsigned char I2CReadNAK() //I2C总线读操作,并发送非应答信号,返回值为读到的字节
{
unsigned char mask;
unsigned char dat; I2C_SDA = ; //首先确保主机释放SDA
for (mask=0x80; mask!=; mask>>=) //从高位到低位依次进行
{
I2CDelay();
I2C_SCL = ; //拉高SCL
if(I2C_SDA == ) //读取SDA的值
dat &= ~mask; //为0时,dat中对应位清零
else
dat |= mask; //为1时,dat中对应位置1
I2CDelay();
I2C_SCL = ; //再拉低SCL,以使从机发送出下一位
}
I2C_SDA = ; //8位数据发送完后,拉高SDA,发送非应答信号
I2CDelay();
I2C_SCL = ; //拉高SCL
I2CDelay();
I2C_SCL = ; //再拉低SCL完成非应答位,并保持住总线 return dat;
}
unsigned char I2CReadACK() //I2C总线读操作,并发送应答信号,返回值为读到的字节
{
unsigned char mask;
unsigned char dat; I2C_SDA = ; //首先确保主机释放SDA
for (mask=0x80; mask!=; mask>>=) //从高位到低位依次进行
{
I2CDelay();
I2C_SCL = ; //拉高SCL
if(I2C_SDA == ) //读取SDA的值
dat &= ~mask; //为0时,dat中对应位清零
else
dat |= mask; //为1时,dat中对应位置1
I2CDelay();
I2C_SCL = ; //再拉低SCL,以使从机发送出下一位
}
I2C_SDA = ; //8位数据发送完后,拉低SDA,发送应答信号
I2CDelay();
I2C_SCL = ; //拉高SCL
I2CDelay();
I2C_SCL = ; //再拉低SCL完成应答位,并保持住总线 return dat;
}
/***********************main.c文件程序源代码*************************/
#include <reg52.h> bit flag300ms = ; //300ms定时标志
unsigned char T0RH = ; //T0重载值的高字节
unsigned char T0RL = ; //T0重载值的低字节 unsigned char GetADCValue(unsigned char chn);
void ValueToString(unsigned char *str, unsigned char val);
void ConfigTimer0(unsigned int ms);
extern void LcdInit();
extern void LcdShowStr(unsigned char x, unsigned char y, const unsigned char *str);
extern void I2CStart();
extern void I2CStop();
extern unsigned char I2CReadACK();
extern unsigned char I2CReadNAK();
extern bit I2CWrite(unsigned char dat); void main ()
{
unsigned char val;
unsigned char str[]; EA = ; //开总中断
ConfigTimer0(); //配置T0定时10ms
LcdInit(); //初始化液晶
LcdShowStr(, , "AIN0 AIN1 AIN3"); //显示通道指示 while()
{
if (flag300ms)
{
flag300ms = ;
//显示通道0的电压
val = GetADCValue(); //获取ADC通道0的转换值
ValueToString(str, val); //转为字符串格式的电压值
LcdShowStr(, , str); //显示到液晶上
//显示通道1的电压
val = GetADCValue();
ValueToString(str, val);
LcdShowStr(, , str);
//显示通道3的电压
val = GetADCValue();
ValueToString(str, val);
LcdShowStr(, , str);
}
}
} unsigned char GetADCValue(unsigned char chn) //读取当前的ADC转换值,chn为ADC通道号0-3
{
unsigned char val; I2CStart();
if (!I2CWrite(0x48<<)) //寻址PCF8591,如未应答,则停止操作并返回0
{
I2CStop();
return ;
}
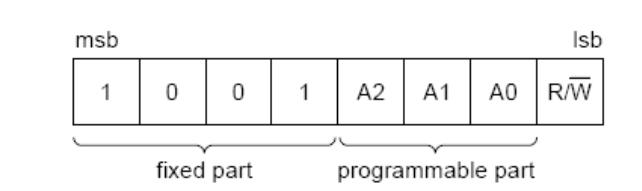
I2CWrite(0x40|chn); //写入控制字节,选择转换通道
I2CStart();
I2CWrite((0x48<<)|0x01); //寻址PCF8591,指定后续为读操作
I2CReadACK(); //先空读一个字节,提供采样转换时间
val = I2CReadNAK(); //读取刚刚转换完的值
I2CStop(); return val;
}
void ValueToString(unsigned char *str, unsigned char val) //ADC转换值转为实际电压值的字符串形式
{
val = (val*) / ; //电压值=转换结果*2.5V/255,式中的25隐含了一位十进制小数
str[] = (val/) + ''; //整数位字符
str[] = '.'; //小数点
str[] = (val%) + ''; //小数位字符
str[] = 'V'; //电压单位
str[] = '\0'; //结束符
} void ConfigTimer0(unsigned int ms) //T0配置函数
{
unsigned long tmp; tmp = / ; //定时器计数频率
tmp = (tmp * ms) / ; //计算所需的计数值
tmp = - tmp; //计算定时器重载值
tmp = tmp + ; //修正中断响应延时造成的误差 T0RH = (unsigned char)(tmp >> ); //定时器重载值拆分为高低字节
T0RL = (unsigned char)tmp;
TMOD &= 0xF0; //清零T0的控制位
TMOD |= 0x01; //配置T0为模式1
TH0 = T0RH; //加载T0重载值
TL0 = T0RL;
ET0 = ; //使能T0中断
TR0 = ; //启动T0
}
void InterruptTimer0() interrupt //T0中断服务函数
{
static unsigned char tmr300ms = ; TH0 = T0RH; //定时器重新加载重载值
TL0 = T0RL;
tmr300ms++;
if (tmr300ms >= ) //定时300ms
{
tmr300ms = ;
flag300ms = ;
}
}
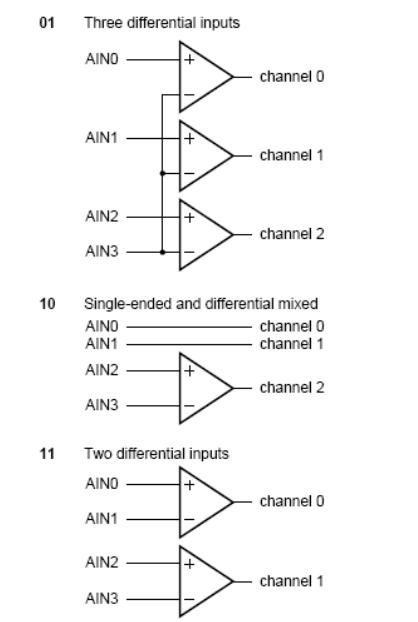
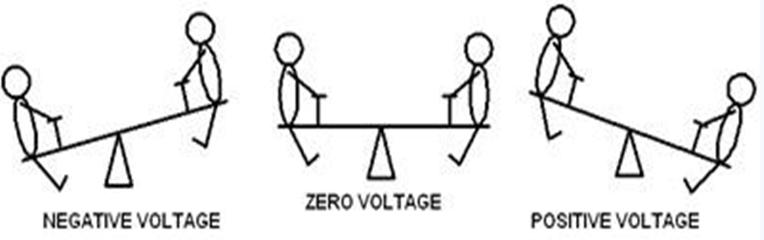
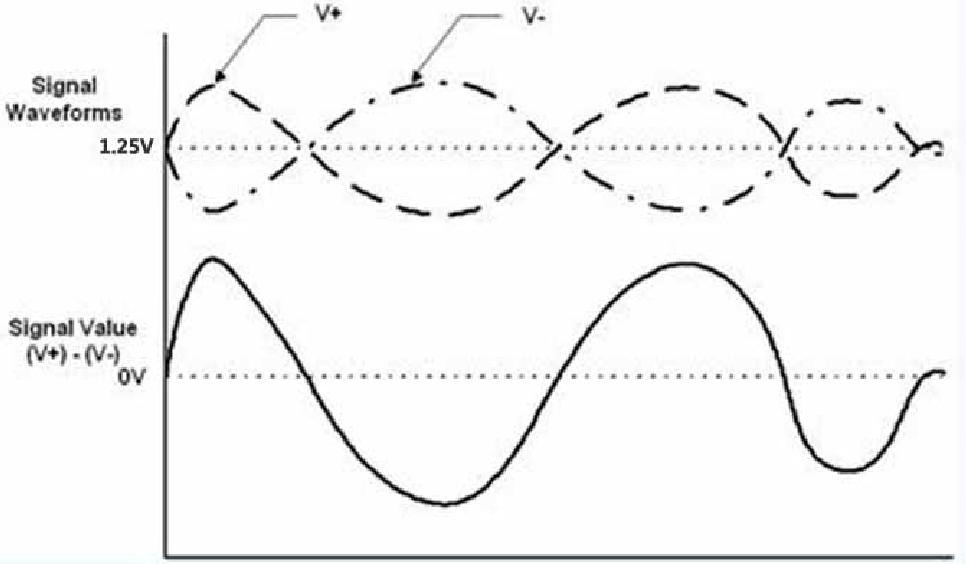
17.5 A/D差分输入信号

17.6 D/A输出
/***********************I2C.c文件程序源代码*************************/
略
/***********************keyboard.c文件程序源代码*************************/
#include <reg52.h> sbit KEY_IN_1 = P2^; //矩阵按键的扫描输入引脚1
sbit KEY_IN_2 = P2^; //矩阵按键的扫描输入引脚2
sbit KEY_IN_3 = P2^; //矩阵按键的扫描输入引脚3
sbit KEY_IN_4 = P2^; //矩阵按键的扫描输入引脚4
sbit KEY_OUT_1 = P2^; //矩阵按键的扫描输出引脚1
sbit KEY_OUT_2 = P2^; //矩阵按键的扫描输出引脚2
sbit KEY_OUT_3 = P2^; //矩阵按键的扫描输出引脚3
sbit KEY_OUT_4 = P2^; //矩阵按键的扫描输出引脚4 const unsigned char code KeyCodeMap[][] = { //矩阵按键编号到PC标准键盘键码的映射表
{ '', '', '', 0x26 }, //数字键1、数字键2、数字键3、向上键
{ '', '', '', 0x25 }, //数字键4、数字键5、数字键6、向左键
{ '', '', '', 0x28 }, //数字键7、数字键8、数字键9、向下键
{ '', 0x1B, 0x0D, 0x27 } //数字键0、ESC键、 回车键、 向右键
};
unsigned char pdata KeySta[][] = { //全部矩阵按键的当前状态
{, , , },
{, , , },
{, , , },
{, , , }
}; extern void KeyAction(unsigned char keycode); void KeyDriver() //按键动作驱动函数
{
unsigned char i, j;
static unsigned char pdata backup[][] = { //按键值备份,保存前一次的值
{, , , },
{, , , },
{, , , },
{, , , }
}; for (i=; i<; i++) //循环扫描4*4的矩阵按键
{
for (j=; j<; j++)
{
if (backup[ i][j] != KeySta[ i][j]) //检测按键动作
{
if (backup[ i][j] != ) //按键按下时执行动作
{
KeyAction(KeyCodeMap[ i][j]); //调用按键动作函数
}
backup[ i][j] = KeySta[ i][j];
}
}
}
}
void KeyScan() //按键扫描函数
{
unsigned char i;
static unsigned char keyout = ; //矩阵按键扫描输出计数器
static unsigned char keybuf[][] = { //按键扫描缓冲区,保存一段时间内的扫描值
{0xFF, 0xFF, 0xFF, 0xFF},
{0xFF, 0xFF, 0xFF, 0xFF},
{0xFF, 0xFF, 0xFF, 0xFF},
{0xFF, 0xFF, 0xFF, 0xFF}
}; //将一行的4个按键值移入缓冲区
keybuf[keyout][] = (keybuf[keyout][] << ) | KEY_IN_1;
keybuf[keyout][] = (keybuf[keyout][] << ) | KEY_IN_2;
keybuf[keyout][] = (keybuf[keyout][] << ) | KEY_IN_3;
keybuf[keyout][] = (keybuf[keyout][] << ) | KEY_IN_4; //消抖后更新按键状态
for (i=; i<; i++) //每行4个按键,所以循环4次
{
if ((keybuf[keyout][ i] & 0x0F) == 0x00)
{ //连续4次扫描值为0,即16ms(4*4ms)内都只检测到按下状态时,可认为按键已按下
KeySta[keyout][ i] = ;
}
else if ((keybuf[keyout][ i] & 0x0F) == 0x0F)
{ //连续4次扫描值为1,即16ms(4*4ms)内都只检测到弹起状态时,可认为按键已弹起
KeySta[keyout][ i] = ;
}
} //执行下一次的扫描输出
keyout++;
keyout &= 0x03;
switch (keyout)
{
case : KEY_OUT_4 = ; KEY_OUT_1 = ; break;
case : KEY_OUT_1 = ; KEY_OUT_2 = ; break;
case : KEY_OUT_2 = ; KEY_OUT_3 = ; break;
case : KEY_OUT_3 = ; KEY_OUT_4 = ; break;
default: break;
}
}
/***********************main.c文件程序源代码*************************/
#include <reg52.h> unsigned char T0RH = ; //T0重载值的高字节
unsigned char T0RL = ; //T0重载值的低字节 void ConfigTimer0(unsigned int ms);
extern void KeyScan();
extern void KeyDriver();
extern void I2CStart();
extern void I2CStop();
extern bit I2CWrite(unsigned char dat); void main ()
{
EA = ; //开总中断
ConfigTimer0(); //配置T0定时1ms while()
{
KeyDriver();
}
} void SetDACOut(unsigned char val) //设置DAC输出值
{
I2CStart();
if (!I2CWrite(0x48<<)) //寻址PCF8591,如未应答,则停止操作并返回
{
I2CStop();
return;
}
I2CWrite(0x40); //写入控制字节
I2CWrite(val); //写如DA值
I2CStop();
}
void KeyAction(unsigned char keycode) //按键动作函数,根据键码执行相应动作
{
static unsigned char volt = ; //输出电压值,隐含了一位十进制小数位 if (keycode == 0x26) //向上键,增加0.1V电压值
{
if (volt < )
{
volt++;
SetDACOut(volt*/); //转换为AD输出值
}
}
else if (keycode == 0x28) //向下键,减小0.1V电压值
{
if (volt > )
{
volt--;
SetDACOut(volt*/); //转换为AD输出值
}
}
}
void ConfigTimer0(unsigned int ms) //T0配置函数
{
unsigned long tmp; tmp = / ; //定时器计数频率
tmp = (tmp * ms) / ; //计算所需的计数值
tmp = - tmp; //计算定时器重载值
tmp = tmp + ; //修正中断响应延时造成的误差 T0RH = (unsigned char)(tmp >> ); //定时器重载值拆分为高低字节
T0RL = (unsigned char)tmp;
TMOD &= 0xF0; //清零T0的控制位
TMOD |= 0x01; //配置T0为模式1
TH0 = T0RH; //加载T0重载值
TL0 = T0RL;
ET0 = ; //使能T0中断
TR0 = ; //启动T0
}
void InterruptTimer0() interrupt //T0中断服务函数
{
TH0 = T0RH; //定时器重新加载重载值
TL0 = T0RL;
KeyScan();
}
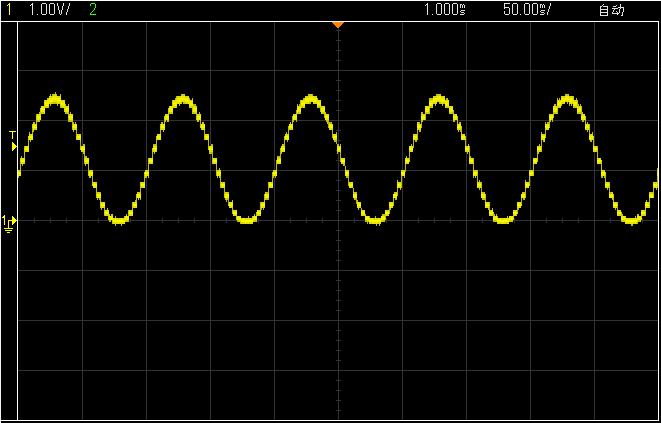
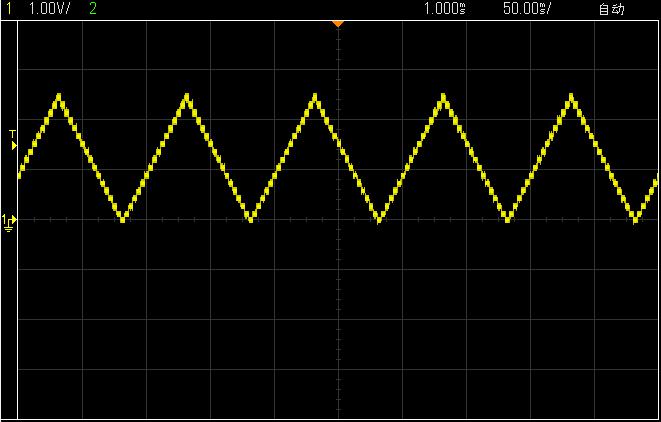
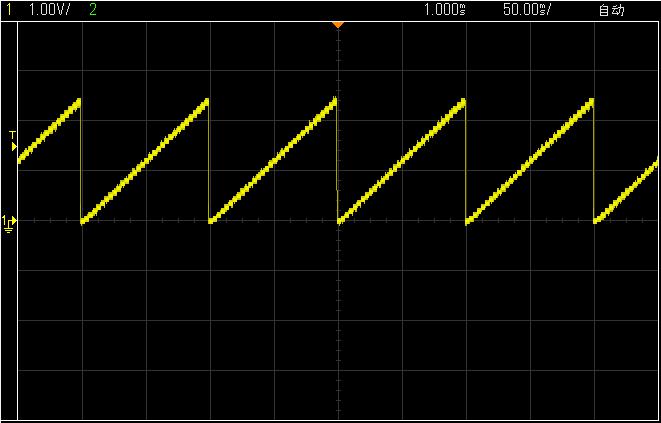
17.7 PCF8591信号发生器
/***********************I2C.c文件程序源代码*************************/
略
/***********************keyboard.c文件程序源代码********************/
略
/***********************main.c文件程序源代码************************/
#include <reg52.h> unsigned char T0RH = ; //T0重载值的高字节
unsigned char T0RL = ; //T0重载值的低字节
unsigned char T1RH = ; //T1重载值的高字节
unsigned char T1RL = ; //T1重载值的低字节 unsigned char code SinWave[] = { //正弦波波表
, , , , , , , , , , , , , ,
, ,, , , , , , , , , , , ,
, , , ,
};
unsigned char code TriWave[] = { //三角波波表
, , , , , , , , , , , , , ,
, ,, , , , , , , , , , , ,
, , , ,
};
unsigned char code SawWave[] = { //锯齿波表
, , , , , , , , , , , , , , ,
,, , , , , , , , , , , , ,
, , ,
};
unsigned char code *pWave; //波表指针 void SetWaveFreq(unsigned char freq);
void ConfigTimer0(unsigned int ms);
extern void KeyScan();
extern void KeyDriver();
extern void I2CStart();
extern void I2CStop();
extern bit I2CWrite(unsigned char dat); void main ()
{
EA = ; //开总中断
ConfigTimer0(); //配置T0定时1ms
pWave = SinWave; //默认正弦波
SetWaveFreq(); //默认频率10Hz while()
{
KeyDriver();
}
} void KeyAction(unsigned char keycode) //按键动作函数,根据键码执行相应动作
{
static unsigned char wave = ; if (keycode == 0x26) //向上键,切换波形
{
if (wave == )
{
wave = ;
pWave = TriWave;
}
else if (wave == )
{
wave = ;
pWave = SawWave;
}
else
{
wave = ;
pWave = SinWave;
}
}
}
void SetDACOut(unsigned char val) //设置DAC输出值
{
I2CStart();
if (!I2CWrite(0x48<<)) //寻址PCF8591,如未应答,则停止操作并返回
{
I2CStop();
return;
}
I2CWrite(0x40); //写入控制字节
I2CWrite(val); //写如DA值
I2CStop();
}
void SetWaveFreq(unsigned char freq) //设置输出波形的频率
{
unsigned long tmp; tmp = (/) / (freq*); //定时器计数频率,是波形频率的32倍
tmp = - tmp; //计算定时器重载值
tmp = tmp + ; //修正中断响应延时造成的误差 T1RH = (unsigned char)(tmp >> ); //定时器重载值拆分为高低字节
T1RL = (unsigned char)tmp;
TMOD &= 0x0F; //清零T1的控制位
TMOD |= 0x10; //配置T1为模式1
TH1 = T1RH; //加载T1重载值
TL1 = T1RL;
ET1 = ; //使能T1中断
PT1 = ; //设置为高优先级
TR1 = ; //启动T1
}
void ConfigTimer0(unsigned int ms) //T0配置函数
{
unsigned long tmp; tmp = / ; //定时器计数频率
tmp = (tmp * ms) / ; //计算所需的计数值
tmp = - tmp; //计算定时器重载值
tmp = tmp + ; //修正中断响应延时造成的误差 T0RH = (unsigned char)(tmp >> ); //定时器重载值拆分为高低字节
T0RL = (unsigned char)tmp;
TMOD &= 0xF0; //清零T0的控制位
TMOD |= 0x01; //配置T0为模式1
TH0 = T0RH; //加载T0重载值
TL0 = T0RL;
ET0 = ; //使能T0中断
TR0 = ; //启动T0
}
void InterruptTimer0() interrupt //T0中断服务函数
{
TH0 = T0RH; //定时器重新加载重载值
TL0 = T0RL;
KeyScan();
}
void InterruptTimer1() interrupt //T1中断服务函数
{
static unsigned char i = ; TH1 = T1RH; //定时器重新加载重载值
TL1 = T1RL;
//循环输出波表中的数据
SetDACOut(pWave[ i]);
i++;
if (i >= )
{
i = ;
}
}
17.8 作业
[size=12.0000pt]3、将信号发生器的程序改装,可以通过按键实现频率的调整。
A/D和D/A的学习的更多相关文章
- 从直播编程到直播教育:LiveEdu.tv开启多元化的在线学习直播时代
2015年9月,一个叫Livecoding.tv的网站在互联网上引起了编程界的注意.缘于Pingwest品玩的一位编辑在上网时无意中发现了这个网站,并写了一篇文章<一个比直播睡觉更奇怪的网站:直 ...
- Angular2学习笔记(1)
Angular2学习笔记(1) 1. 写在前面 之前基于Electron写过一个Markdown编辑器.就其功能而言,主要功能已经实现,一些小的不影响使用的功能由于时间关系还没有完成:但就代码而言,之 ...
- ABP入门系列(1)——学习Abp框架之实操演练
作为.Net工地搬砖长工一名,一直致力于挖坑(Bug)填坑(Debug),但技术却不见长进.也曾热情于新技术的学习,憧憬过成为技术大拿.从前端到后端,从bootstrap到javascript,从py ...
- 消息队列——RabbitMQ学习笔记
消息队列--RabbitMQ学习笔记 1. 写在前面 昨天简单学习了一个消息队列项目--RabbitMQ,今天趁热打铁,将学到的东西记录下来. 学习的资料主要是官网给出的6个基本的消息发送/接收模型, ...
- js学习笔记:webpack基础入门(一)
之前听说过webpack,今天想正式的接触一下,先跟着webpack的官方用户指南走: 在这里有: 如何安装webpack 如何使用webpack 如何使用loader 如何使用webpack的开发者 ...
- Unity3d学习 制作地形
这周学习了如何在unity中制作地形,就是在一个Terrain的对象上盖几座小山,在山底种几棵树,那就讲一下如何完成上述内容. 1.在新键得项目的游戏的Hierarchy目录中新键一个Terrain对 ...
- 《Django By Example》第四章 中文 翻译 (个人学习,渣翻)
书籍出处:https://www.packtpub.com/web-development/django-example 原作者:Antonio Melé (译者注:祝大家新年快乐,这次带来<D ...
- 菜鸟Python学习笔记第一天:关于一些函数库的使用
2017年1月3日 星期二 大一学习一门新的计算机语言真的很难,有时候连函数拼写出错查错都能查半天,没办法,谁让我英语太渣. 关于计算机语言的学习我想还是从C语言学习开始为好,Python有很多语言的 ...
- 多线程爬坑之路-学习多线程需要来了解哪些东西?(concurrent并发包的数据结构和线程池,Locks锁,Atomic原子类)
前言:刚学习了一段机器学习,最近需要重构一个java项目,又赶过来看java.大多是线程代码,没办法,那时候总觉得多线程是个很难的部分很少用到,所以一直没下决定去啃,那些年留下的坑,总是得自己跳进去填 ...
- node.js学习(三)简单的node程序&&模块简单使用&&commonJS规范&&深入理解模块原理
一.一个简单的node程序 1.新建一个txt文件 2.修改后缀 修改之后会弹出这个,点击"是" 3.运行test.js 源文件 使用node.js运行之后的. 如果该路径下没有该 ...
随机推荐
- 【Python3练习题 012】 输入一行字符,分别统计出其中英文字母、空格、数字和其它字符的个数。
ASCII 码表的对应值,知道 ord('a') 能将字符 'a' 转化为 ASCII 码表上对应的数值,就可以了.其中,数字 0-9 对应的码值为 48-57,大写字母 A-Z 对应 65-90,小 ...
- a标签中的onclick和href的使用
onclick和href 链接的 onclick 事件被先执行,其次是 href 属性下的动作(页面跳转,或 javascript 伪链接): 假设链接中同时存在 href 与 onclick,如果 ...
- spark、standalone集群 (2)集群zookeeper 热备
测试 cmd spark-examples-1.6.0-hadoop2.6.0.jar spark 2.0以后 就没有这个 jar.需要下载 ./bin/spark-submit -- ...
- 将选中项的value值赋给select的title
$('select').change(function () { $(this).attr("title",$(this).find("option:selected&q ...
- java中级——集合框架【4】-Collections
Collections 首先我们要知道Collections是一个类,容器的工具类,就如同Arrays是数组的工具类 反转 reverse 使List中的数据发生发转 package cn.jse.c ...
- 使用getopts处理输入参数
在编写shell脚本中,需要输入参数,使用过程中,getopts更加方便.可以很好的处理用户输入的参数和参数值. 参加如下一段脚本: #!/bin/bash while getopts ": ...
- WPF Path总结(一)
首先来看看Path的定义,参考MSDN:绘制一系列相互连接的直线和曲线.介绍比较简单,我们再来看看备注中有些什么,Path 对象可以绘制封闭式还是开放式形状. 多个形状和甚至曲线的形状.与不 Line ...
- spring 标签
*/ @Slf4j @Service public class RetryService { @Autowired private MqConfig mqConfig; /** * 如果网络连接失败, ...
- java & jdk
java & jdk JDK 下载太慢 & java 12 https://download.oracle.com/otn-pub/java/jdk/12.0.1+12/69cfe15 ...
- Delphi 限制Edit输入 多个例子
procedure TForm1.Edit1KeyPress(Sender: TObject; var Key: Char); begin if not (key in [ '.',#8]) then ...