论文阅读LR LIO-SAM
Abstract
紧耦合lidar inertial里程计, 用smoothing和mapping.
1. Introduction
紧耦合lidar-inertial里程计.
- 紧耦合的lidar inertial里程计框架
2. Related work
一般都是用ICP或者是GICP.
在LOAM[1], IMU被引入来de-skew lidar scan, 然后给移动一个先验做scan-匹配.
在[15], 预积分IMU测量被用来 de-skew 点云.
一个robocentric lidar-inertial 状态估计器, R-LINS[16] , 用error-state KF.
LIOM只能 0.6 倍实时
3. LiDAR Inertial Odometry via SAM
A. System Overview
状态是:
\]
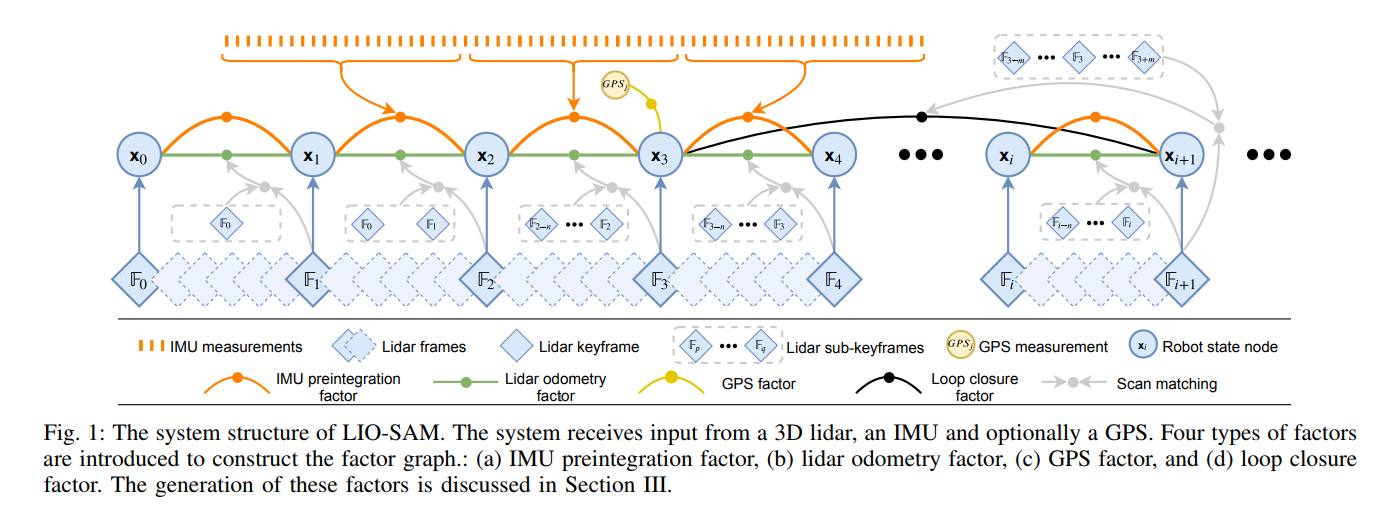
B. IMU Preintegration Factor
角速度, 加速度的测量:
\hat{\boldsymbol{\omega}}_{t}=\boldsymbol{\omega}_{t}+\mathbf{b}_{t}^{\boldsymbol{\omega}}+\mathbf{n}_{t}^{\boldsymbol{\omega}} \\
\hat{\mathbf{a}}_{t}=\mathbf{R}_{t}^{\mathbf{B W}}\left(\mathbf{a}_{t}-\mathbf{g}\right)+\mathbf{b}_{t}^{\mathbf{a}}+\mathbf{n}_{t}^{\mathbf{a}},
\end{array}
\]
这里 \(\hat{\omega}_t\) 和 \(\hat{a}_t\) 是 raw 测量在 \(B\) 系.
速度, 位置和旋转在 \(t+\Delta t\)时刻如下:
\mathbf{v}_{t+\Delta t}=\mathbf{v}_{t}+\mathbf{g} \Delta t+\mathbf{R}_{t}\left(\hat{\mathbf{a}}_{t}-\mathbf{b}_{t}^{\mathbf{a}}-\mathbf{n}_{t}^{\mathbf{a}}\right) \Delta t \\
\mathbf{p}_{t+\Delta t}=\mathbf{p}_{t}+\mathbf{v}_{t} \Delta t+\frac{1}{2} \mathbf{g} \Delta t^{2} \\
&+\frac{1}{2} \mathbf{R}_{t}\left(\hat{\mathbf{a}}_{t}-\mathbf{b}_{t}^{\mathbf{a}}-\mathbf{n}_{t}^{\mathbf{a}}\right) \Delta t^{2} \\
\mathbf{R}_{t+\Delta t}=\mathbf{R}_{t} \exp \left(\left(\hat{\boldsymbol{\omega}}_{t}-\mathbf{b}_{t}^{\omega}-\mathbf{n}_{t}^{\omega}\right) \Delta t\right)
\end{aligned}
\]
这里 \(R_t = R_t^{WB} = R_t^{{BW}^T}\). 这里我们假设 角速度 和 加速度 的\(B\) 保持不变.
C. LiDAR Odometry Factor
当一个新的scan到达时, 我们先做特征提取. Edge / planar 特征被提取来估计局部点的roughness. 有大的 roughness值的实被分类为edge, 值小的就是planar特征.
1. Sub-keyframes for voxel map
2. Scan-matching
3. Relative transform
edge点和平面点对应如下:
\mathbf{d}_{e_{k}}=\frac{\left|\left(\mathbf{p}_{i+1, k}^{e}-\mathbf{p}_{i, u}^{e}\right) \times\left(\mathbf{p}_{i+1, k}^{e}-\mathbf{p}_{i, v}^{e}\right)\right|}{\left|\mathbf{p}_{i, u}^{e}-\mathbf{p}_{i, v}^{e}\right|} \\
\mathbf{d}_{p_{k}}=\frac{\left(\mathbf{p}_{i, u}^{p}-\mathbf{p}_{i, v}^{p}\right) \times\left(\mathbf{p}_{i, u}^{p}-\mathbf{p}_{i, w}^{p}\right) \mid}{\left|\left(\mathbf{p}_{i, u}^{p}-\mathbf{p}_{i, v}^{p}\right) \times\left(\mathbf{p}_{i, u}^{p}-\mathbf{p}_{i, w}^{p}\right)\right|}
\end{array}
\]
D. GPS Factor
当收到GPS测量的时候, 我会先转换到局部笛卡尔坐标系.
一般我们只有在估计的位置协方差大于接受的GPS位置协方差的时候才加入 GPS factor.
E. Loop Closure Factor
...
4. Experiments
我们比较了LIO-SAM, LOAM和LIOM. LIO-SAM和LOAM是专注在实时的输出, 而LIOM是有无限的时间处理的.
A. Rotation Dataset
遇到的最大的旋转速度是 133.7°/s.
B. Walking Dataset
LIOM只跑了0.56x的实时.
C. Campus Dataset
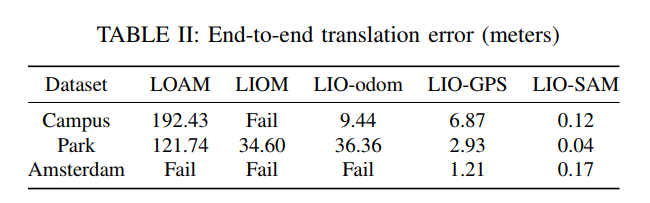
D. Park Dataset
...
E. Amsterdam Dataset
....
F. Benchmarking Results
...
5. Conclusions and Discussion
没啥.
论文阅读LR LIO-SAM的更多相关文章
- 论文阅读 | FoveaBox: Beyond Anchor-based Object Detector
论文阅读——FoveaBox: Beyond Anchor-based Object Detector 概述 这是一篇ArXiv 2019的文章,作者提出了一种新的anchor-free的目标检测框架 ...
- [论文阅读]阿里DIN深度兴趣网络之总体解读
[论文阅读]阿里DIN深度兴趣网络之总体解读 目录 [论文阅读]阿里DIN深度兴趣网络之总体解读 0x00 摘要 0x01 论文概要 1.1 概括 1.2 文章信息 1.3 核心观点 1.4 名词解释 ...
- 论文阅读(Xiang Bai——【PAMI2017】An End-to-End Trainable Neural Network for Image-based Sequence Recognition and Its Application to Scene Text Recognition)
白翔的CRNN论文阅读 1. 论文题目 Xiang Bai--[PAMI2017]An End-to-End Trainable Neural Network for Image-based Seq ...
- BITED数学建模七日谈之三:怎样进行论文阅读
前两天,我和大家谈了如何阅读教材和备战数模比赛应该积累的内容,本文进入到数学建模七日谈第三天:怎样进行论文阅读. 大家也许看过大量的数学模型的书籍,学过很多相关的课程,但是若没有真刀真枪地看过论文,进 ...
- 论文阅读笔记 - YARN : Architecture of Next Generation Apache Hadoop MapReduceFramework
作者:刘旭晖 Raymond 转载请注明出处 Email:colorant at 163.com BLOG:http://blog.csdn.net/colorant/ 更多论文阅读笔记 http:/ ...
- 论文阅读笔记 - Mesos: A Platform for Fine-Grained ResourceSharing in the Data Center
作者:刘旭晖 Raymond 转载请注明出处 Email:colorant at 163.com BLOG:http://blog.csdn.net/colorant/ 更多论文阅读笔记 http:/ ...
- Deep Reinforcement Learning for Dialogue Generation 论文阅读
本文来自李纪为博士的论文 Deep Reinforcement Learning for Dialogue Generation. 1,概述 当前在闲聊机器人中的主要技术框架都是seq2seq模型.但 ...
- 论文阅读笔记 Word Embeddings A Survey
论文阅读笔记 Word Embeddings A Survey 收获 Word Embedding 的定义 dense, distributed, fixed-length word vectors, ...
- 论文阅读笔记六:FCN:Fully Convolutional Networks for Semantic Segmentation(CVPR2015)
今天来看一看一个比较经典的语义分割网络,那就是FCN,全称如题,原英文论文网址:https://people.eecs.berkeley.edu/~jonlong/long_shelhamer_fcn ...
随机推荐
- .Net Core AddTransient、AddScoped和AddSingleton的使用
区别: AddTransient 每次service请求都是获得不同的实例,暂时性模式:暂时性对象始终不同,无论是不是同一个请求(同一个请求里的不同服务)同一个客户端,每次都是创建新的实例 AddSc ...
- Windows 10系统运维之OpenSSH
随着PowerShell和OpenSSH的日渐成熟,在客户终端Windows居多的运维之中,使用Win32-OpenSSH和Powershell来管理一些客户机变成了相当实用的一种解决方案. Open ...
- 微服务架构下 CI/CD 如何落地
本文系云原生应用最佳实践杭州站活动演讲稿整理.杭州站活动邀请了 Apache APISIX 项目 VP 温铭.又拍云平台开发部高级工程师莫红波.蚂蚁金服技术专家王发康.有赞中间件开发工程师张超,分享云 ...
- docker centos容器无法yum
问题 dockerfile yum -y install vim的时候一直未响应 但是在本地虚拟机centos7上运行则没问题 https://blog.csdn.net/jimiao_xxx ...
- JZOJ2020年8月11日提高组T3 页
JZOJ2020年8月11日提高组T3 页 题目 Description 战神阿瑞斯听说2008年在中华大地上,将举行一届规模盛大的奥林匹克运动会,心中顿觉异常兴奋,他想让天马在广阔的天空上,举行一场 ...
- PyQt(Python+Qt)学习随笔:QTabWidget部件选项卡可用状态访问方法isTabEnabled、setTabEnabled
老猿Python博文目录 专栏:使用PyQt开发图形界面Python应用 老猿Python博客地址 QTabWidget的每个选项卡及页面可设置是否可用,如果选项卡不可用时,则不能通过操作手工切换到该 ...
- 第二十一章、 Model/View便利类列表部件QListWidget详解
老猿Python博文目录 专栏:使用PyQt开发图形界面Python应用 老猿Python博客地址 一.概述 列表部件(List Widget)对应类QListWidget,是从QListView派生 ...
- PyQt学习随笔:重写组件的event方法捕获组件的事件
在PyQt的组件对象中,都有从QWidget中继承的方法event,而QWidget.event是对QObject类定义的虚拟方法event的实现. event方法的语法: bool event(QE ...
- 软件工程团队作业-测试与发布(Alpha版本)
Alpha版本测试报告 功能测试报告 概述 测试阶段:alpha验收测试 测试方法:手动功能测试 测试环境(测试矩阵) Windows操作系统(win10)附带"Windows讲述人&quo ...
- vue functional函数式组件
第1种写法 test.vue <template functional> <div class="test"> {{props.test.name}} &l ...