Jetson AGX Xavier刷机
1. 准备一台电脑做主机(host),运行Ubuntu系统,我用的是虚拟机,运行的是Ubuntu 18.04系统。
2. 主机更换apt-get源,参见https://www.cnblogs.com/gloria-zhang/p/12803075.html
3. 用原装USB-typeC线连接主机和Xavier(电源灯旁边的typeC口),保持Xavier关机状态。
4. 在主机上下载JetPack SDK,地址https://developer.nvidia.com/embedded/jetpack。选择Xavier系列,下载NVIDIA SDK Manager,我安装的是4.3版本。

5. 运行sdkmanager
sudo apt install ./sdkmanager_1.0.1-5538_amd64.deb
sdkmanager
启动后主界面输入英伟达网页注册的账号密码,在线刷机,数据收集选哪个都行。


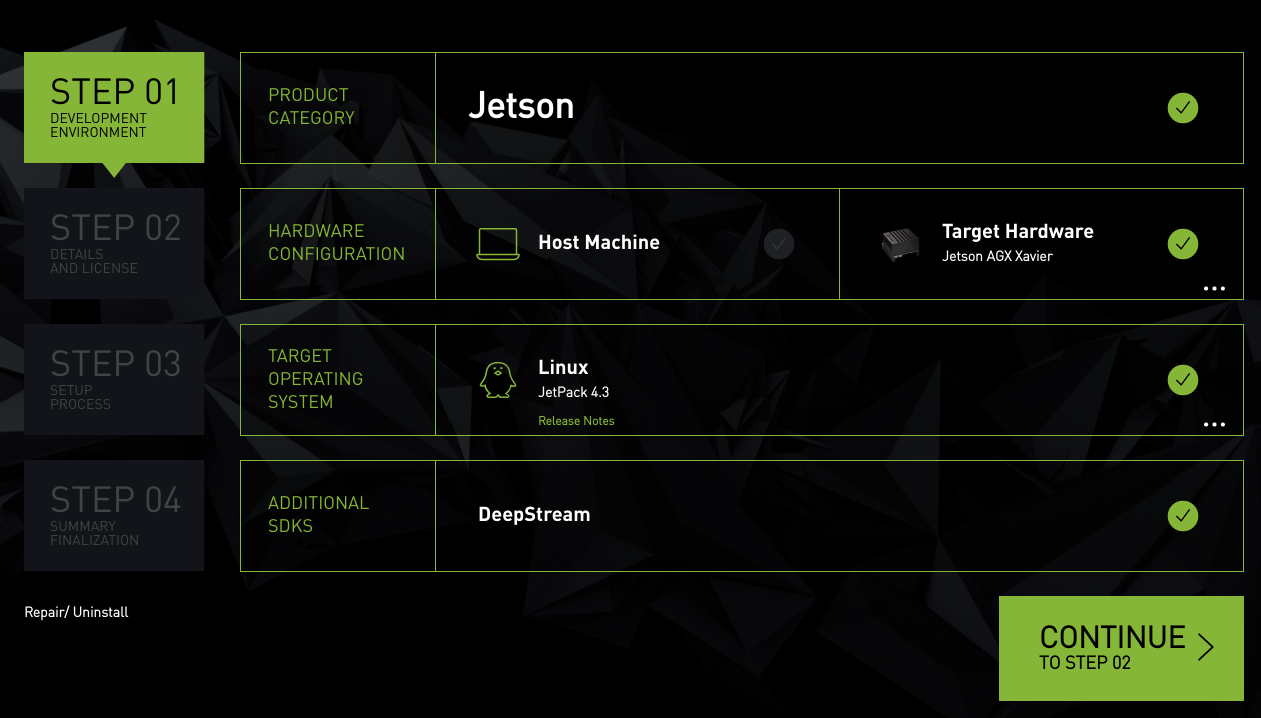
第一步中选择相关内容,Host Machine是给主机安装的,可以不选,我用的虚拟机不需要安装什么。
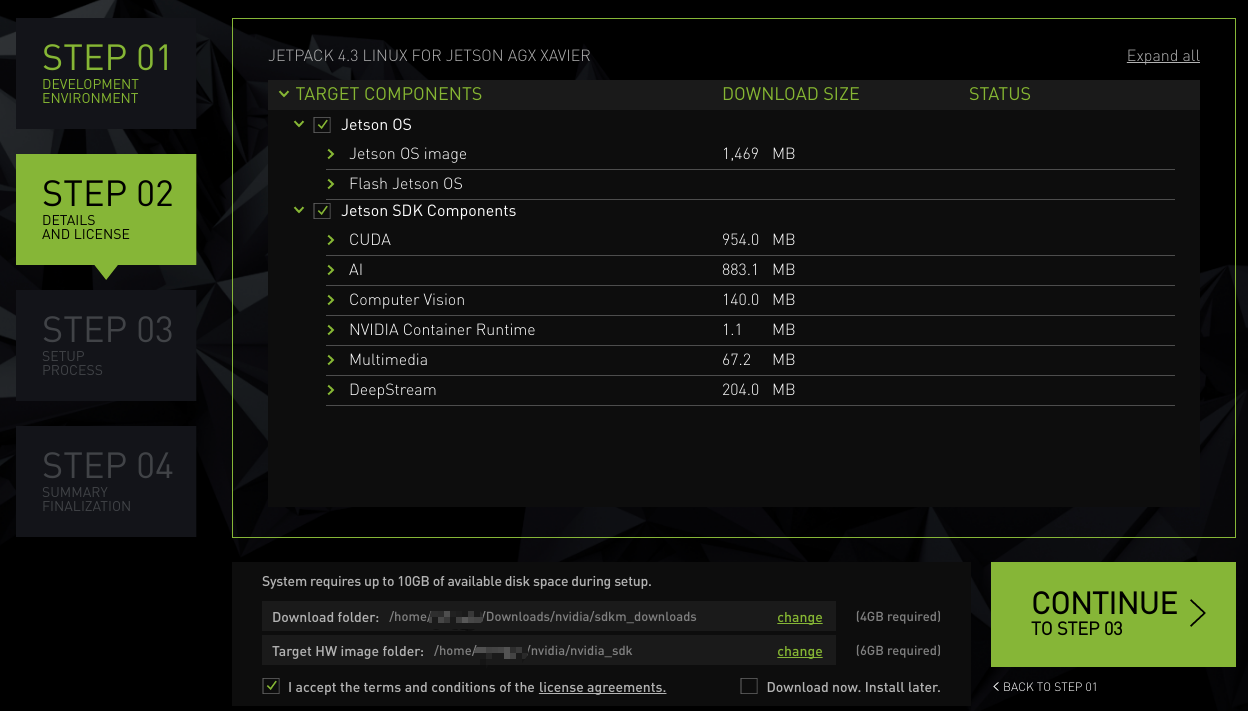
第二步中可以先下载再安装,全都下载好之后也可以在主页面选离线安装。
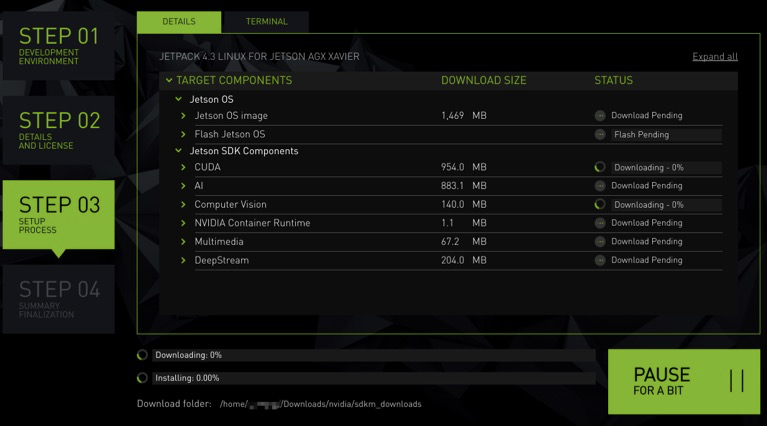
进入安装界面会要求输入主机密码,然后进入安装界面。

开始安装时会先执行Jetson OS image,准备镜像,完成后跳出刷机准备,可以选自动和手动,如果Xavier设备可以正常启动,进入操作系统,那就可以选择自动,不过我用自动模式没有成功过,所以选择手动模式。
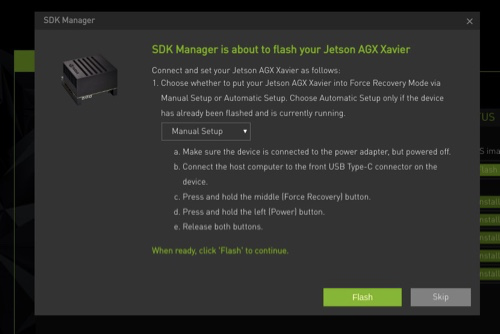
按照上面显示的步骤,连接好主机和设备,进入恢复模式后,可以在终端输入lsusb,查看是否连接成功,如果出现Nvidia Corp,就说明连接成功,点Flash,开始刷系统。

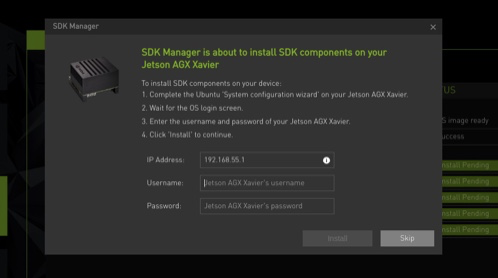
当Flash Jetson OS完成后,会弹出一个窗口,要求输入Xavier的用户名和密码,这是需要在Xavier上进行系统设置,并更换apt源。https://www.cnblogs.com/gloria-zhang/p/12802995.html
然后在主机端弹出的窗口中输入刚配置的Xavier的用户名和密码,等待安装结束。
这样刷机就成功了,安装界面上显示的都安装到Xavier上了。
Jetson AGX Xavier刷机的更多相关文章
- Jetson AGX Xavier ROS下调用USB单目摄像头
Jetson AGX Xavier安装的ROS是Melodic版本的,所以部署的时候用到的包都是Melodic的. 1. 查看USB摄像头 摄像头连接Xavier设备,调用命令查看. ls /dev/ ...
- 使用jetpack 4.2.2对jetson tx2进行刷机
一.前言 加班加点几天今天终于成功刷机,记录一下成功的一些过程,以方便同样卡住的朋友参考. 延续官网教程[1]中对设备的叫法,pc机称为host,tx2称为target. 二.过程 1. host相关 ...
- Jetson AGX Xavier更换apt-get源
使用apt-get安装时,会很慢,更换了国内的源后,就可以解决这个问题了. 1. 备份sources.list文件 sudo cp /etc/apt/sources.list /etc/apt/sou ...
- Jetson AGX Xavier安装TensorFlow
参考https://docs.nvidia.com/deeplearning/frameworks/install-tf-jetson-platform/#prereqs 1. 安装系统包 sudo ...
- Jetson AGX Xavier/Ubuntu更改pip3源
pip3换源: 修改~/.pip/pip.conf,如果没有这个文件,就创建一个. 内容如下: [global]index-url = https://pypi.tuna.tsinghua.edu.c ...
- Jetson AGX Xavier/Ubuntu安装SSD
参考 https://blog.csdn.net/xingdou520/article/details/84309155 1. 查看硬盘所有分区 sudo fdisk -lu 会找到/dev/nvme ...
- Jetson AGX Xavier/Ubuntu安装QT
安装QT命令 sudo apt-get install qt5-default qtcreator -y 如果出现错误:unknow module webenginewidgets serialpor ...
- Jetson AGX Xavier/ubuntu查找文件
用以下命令查找文件 sudo updatedb locate xxx #xxx是文件名 如果找不到命令,则需要安装mlocate sudo apt-get install mlocate
- Jetson AGX Xavier部署ORB_SLAM2(ROS)
1. 修改CMakeLists.txt Examples/ROS/ORB_SLAM2下的CMakeLists.txt 原 set(LIBS ${OpenCV_LIBS} ${EIGEN3_LIBS} ...
随机推荐
- centos7 编译安装mysql5.7
mysql源码可以到官网下载 安装依赖包 yum -y install gcc gcc-c++ ncurses ncurses-devel bison libgcrypt perl make cmak ...
- NKOJ3765 k个最小和
问题描述 有k个整数数组,各包含k个元素,从每个数组中选取一个元素加起来,可以得到k^k个和,求这些和中最小的k个值. 输入格式 第一行,一个整数k(k<=500)接下来k行,每行k个正整数(& ...
- Luogu1039 侦探推理
题目描述 明明同学最近迷上了侦探漫画<柯南>并沉醉于推理游戏之中,于是他召集了一群同学玩推理游戏.游戏的内容是这样的,明明的同学们先商量好由其中的一个人充当罪犯(在明明不知情的情况下),明 ...
- 新建jsp文件,The superclass "javax.servlet.http.HttpServlet" was not found on the Java Build Path错误解决方法
新建一个jsp文件后,有一个错误,The superclass "javax.servlet.http.HttpServlet" was not found on the Java ...
- Linux学习66 运维安全-通信加密和解密技术入门
一.Linux Service and Security 1.OpenSSL(ssl/tls)协议 2.OpenSSH(ssh)协议 3.bind(dns) 4.web(http):httpd(apa ...
- CF633(div.2)A. Filling Diamonds
题目描述 http://codeforces.com/contest/1339/problem/A 给定一个 \(n(1\le n \le 10^9)\) ,问用一个由两个三角形组成的菱形,填充下面这 ...
- Java第二十七天,线程池
1.什么情况下需要线程池? 频絮创建线程就会大大降低系统的效率,那么有没有一种办法使得线程可以复用,就是执行完一个任务,并不被销毁,而是可以继续执行其他的任务?在java中可以通过线程池来达到这样的效 ...
- JAVA中基础类型和字串类型之间的相互转换
转自:https://www.imooc.com/code/2251 仅做个人学习记录之用,侵删. 在程序开发中,我们经常需要在基本数据类型和字符串之间进行转换. 其中,基本类型转换为字符串有三种方法 ...
- 中阶d03.1 JDBCDemo
1. jdbc使用查看驱动的doc文档<connector-j.html> 2.代码实现:1. 注册驱动---2. 建立连接---3. 创建statement ,跟数据库打交道--- -- ...
- python3(二十九) orderClass
""" """ __author__ = 'shaozhiqi' # Python的class中还有许多有特殊用途的函数,可以帮助我们定制类 ...