维特比算法及python实现
先放一张找到的算法流程图:
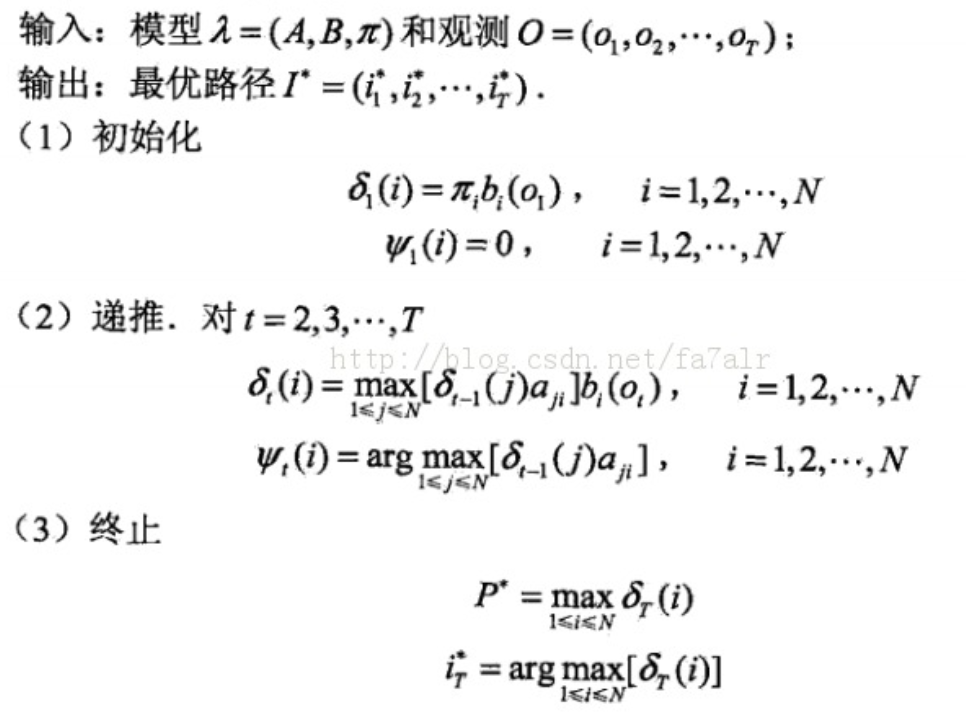
上图解释:
A:状态转移概率矩阵,Aij表示状态i到状态j转换的概率,即P(state=j | state=i)。下面代码中以P表示。
B:观测矩阵,Bij表示给定状态i,观测结果为j的概率。即P(observation=j | state=i)
π:初始时状态概率分布,表示各状态出现的概率。代码中以pi表示。
O:输入的观测序列。
 :表示经过节点(时刻t,状态state=i)的局部最优路径到此节点时对应的概率,即给定X=(x1,...xt,...xn)子序列(x1,x2,...xt)时,对应的最佳状态序列(末状态state=i)的概率值。
:表示经过节点(时刻t,状态state=i)的局部最优路径到此节点时对应的概率,即给定X=(x1,...xt,...xn)子序列(x1,x2,...xt)时,对应的最佳状态序列(末状态state=i)的概率值。
下面代码中以delta表示
 :跟上面相关。表示上面最优路径经过的节点的上一个状态id。下面代码中以w表示。
:跟上面相关。表示上面最优路径经过的节点的上一个状态id。下面代码中以w表示。
1式理解:右边为状态state=i出现的概率乘以(状态i下观测到O[t=1]的概率)
2式理解:当前节点概率值,为(上一时刻各节点概率值乘以状态转换概率)的最大值,再乘以状态state=i时观测到O[t]的概率。这就是动态规划的思想了。
以上,熟悉隐马尔可夫模型的话,理解应该没问题了。
-------------------------------------------------------------------------
下面进入代码部分:
import numpy as np
def my_viterbi(O,P,B,pi):
'''
O:观测序列
P:状态转移矩阵,Pij表示状态i到j转换的条件概率
B:观测矩阵,Bij表示状态i下观测到Oj的条件概率
pi:初始的状态概率分布 return:各个时刻选择的状态id
''' set_O=list(set(O))
# 观测结果有多少种类
class_observe=len(set_O)
# 将观测序列one-hot化,不然会超过索引
for i in range(len(O)):
O[i]=set_O.index(O[i])
# 进行若干检查
assert class_observe==B.shape[1],'观测序列与观测矩阵的观测结果维度不一致!'
assert P.shape[0]==B.shape[0],'转移矩阵与观测矩阵的状态维度不一致!'
assert P.shape[0]==len(pi),'转移矩阵与状态分布的状态维度不一致!'
sequence_len=len(O)# 观测序列长度,即有多少个时刻t
states_per_time=P.shape[0]# 每个时刻有多少个状态,这里假设相同。实际可以不同,不同的话,应该要给出每个时刻对应的状态集合。这里默认所有状态
# 记录(局部)最优路径中节点(t时刻状态s)的概率值,当记录完毕后,逆序寻找最优节点即可
delta=np.zeros((sequence_len,states_per_time))
# 记录经过t时刻状态s的局部最优路径的前一个状态id
w=np.zeros((sequence_len,states_per_time))
# 初始化
for s in range(states_per_time):
delta[0,s]=pi[s]*B[s,O[0]]# 即状态概率分布乘以观测矩阵对应元素,得到0时刻各状态对应概率值
for t in range(1,sequence_len):
for s in range(states_per_time):
delta[t,s]=np.max([delta[t-1,s_]*P[s_,s] for s_ in range(states_per_time)])*B[s,O[t]]
w[t,s]=np.argmax([delta[t-1,s_]*P[s_,s] for s_ in range(states_per_time)])
max_sequence_prob=np.max(delta[-1,:])
res=np.zeros(sequence_len).astype(np.int32)
res[-1]=np.argmax(delta[-1,:])
for t in range(sequence_len-2,-1,-1):
res[t]=w[t+1,res[t+1]]
return res,max_sequence_prob # 状态转移矩阵
P=np.array([[0.5,0.2,0.3],[0.3,0.5,0.2],[0.2,0.3,0.5]])
# 状态生成观测矩阵
B=np.array([[0.5,0.5],[0.4,0.6],[0.7,0.3]])
# 观测序列,假设有2种观察结果,比如扔硬币,从0开始
O=np.array([2,3,3])
# 初始时各个状态出现的概率
pi=np.array([0.2,0.4,0.4])
res,prob=my_viterbi(O, P, B, pi)
print(res)
输出:
array([2,1,1])
总结
涉及到的知识点为隐马尔可夫模型和动态规划。比较简单。
维特比算法及python实现的更多相关文章
- 【机器学习】【条件随机场CRF-2】CRF的预测算法之维特比算法(viterbi alg) 详解 + 示例讲解 + Python实现
1.CRF的预测算法条件随机场的预测算法是给定条件随机场P(Y|X)和输入序列(观测序列)x,求条件概率最大的输出序列(标记序列)y*,即对观测序列进行标注.条件随机场的预测算法是著名的维特比算法(V ...
- 维特比算法Python实现
前言 维特比算法是隐马尔科夫问题的一个基本问题算法.维特比算法解决的问题是已知观察序列,求最可能的标注序列. 什么是维特比算法? 维特比算法尽管是基于严格的数学模型的算法,但是维特比算法毕竟是算法,因 ...
- 维特比算法(Viterbi)及python实现样例
维特比算法(Viterbi) 维特比算法 维特比算法shiyizhong 动态规划算法用于最可能产生观测时间序列的-维特比路径-隐含状态序列,特别是在马尔可夫信息源上下文和隐马尔科夫模型中.术语“维特 ...
- 维特比算法(Viterbi)-实例讲解(暴力破解+代码实现)
1.简介 维特比算法是一个通用的求序列最短路径的动态规划算法,也可以用于很多其他问题,比如:文本挖掘.分词原理.既然是动态规划算法,那么就需要找到合适的局部状态,以及局部状态的递推公式.在HMM中,维 ...
- Machine Learning系列--维特比算法
维特比算法(Viterbi algorithm)是在一个用途非常广的算法,本科学通信的时候已经听过这个算法,最近在看 HMM(Hidden Markov model) 的时候也看到了这个算法.于是决定 ...
- Java实现:抛开jieba等工具,写HMM+维特比算法进行词性标注
一.前言:词性标注 二.经典维特比算法(Viterbi) 三.算法实现 四.完整代码 五.效果演示: 六.总结 一.前言:词性标注 词性标注(Part-Of-Speech tagging, POS t ...
- 维特比算法(Viterbi Algorithm)
寻找最可能的隐藏状态序列(Finding most probable sequence of hidden states) 对于一个特殊的隐马尔科夫模型(HMM)及一个相应的观察序列,我们常常希望 ...
- HMM 自学教程(六)维特比算法
本系列文章摘自 52nlp(我爱自然语言处理: http://www.52nlp.cn/),原文链接在 HMM 学习最佳范例,这是针对 国外网站上一个 HMM 教程 的翻译,作者功底很深,翻译得很精彩 ...
- 八大排序算法的 Python 实现
转载: 八大排序算法的 Python 实现 本文用Python实现了插入排序.希尔排序.冒泡排序.快速排序.直接选择排序.堆排序.归并排序.基数排序. 1.插入排序 描述 插入排序的基本操作就是将一个 ...
随机推荐
- Django后台获取不到前端axios-post请求提交的参数的解决方法
解决方法 用 URLSearchParams 传递参数 let param = new URLSearchParams() param.append('username', 'admin') para ...
- C/C++字符串转换函数;
字符串转数字: char 转 int 函数: atoi wchar 转 int 函数: _wtoi 数字转字符串: std::to_string(): std::to_wsting();
- yii学习笔记(四)
return $this->goBack(); // 先看看Yii::$app->user->returnUrl是否已经设置, returnUrl没有设置且goBack()中的参数也 ...
- MySQL的密码操作命令
一.请问在win2K命令提示符下怎样更改mysql的root管理员密码? >mysql -u root -p Enter password: ****** mysql> use mysql ...
- TTTTTTTTTTTTTT hdu 5763 Another Meaning 哈希+dp
Another Meaning Time Limit: 2000/1000 MS (Java/Others) Memory Limit: 65536/65536 K (Java/Others)T ...
- 深度理解链式前向星——转载自ACdreamer
转载自ACdreamer [转载]深度理解链式前向星 我们首先来看一下什么是前向星. 前向星是一种特殊的边集数组,我们把边集数组中的每一条边按照起点从小到大排序,如果起点相同就按照终点从小到大排序 ...
- HDU 4738 Caocao's Bridges ——(找桥,求联通块)
题意:给你一个无向图,给你一个炸弹去炸掉一条边,使得整个图不再联通,你需要派人去安置炸弹,且派去的人至少要比这条边上的人多.问至少要派去多少个,如果没法完成,就输出-1. 分析:如果这个图是已经是多个 ...
- C# WebServices 客户端服务端
一.编写一个WebService 开发环境:VS2012 1.编写webservice阶段 打开VS2012,新建一个空的web应用程序,我这里用的Framework版本是4.5的 新建好web应用程 ...
- Mac 配置adb环境变量(为了开Appium)亲测
1.启动终端Terminal. 2.进入当前用户的home目录. 在命令行输入echo $HOME 3.创建.bash_profile文件. 命令行输入touch .bash_profile 4.打开 ...
- 浏览器端-W3School-HTML:HTML DOM Textarea 对象
ylbtech-浏览器端-W3School-HTML:HTML DOM Textarea 对象 1.返回顶部 1. HTML DOM Textarea 对象 Textarea 对象 Textarea ...