算法+OpenCV】基于opencv的直线和曲线拟合与绘制(最小二乘法)
http://blog.csdn.net/guduruyu/article/details/72866144
最小二乘法多项式曲线拟合,是常见的曲线拟合方法,有着广泛的应用,这里在借鉴最小二乘多项式曲线拟合原理与实现的原理的基础上,介绍如何在OpenCV来实现基于最小二乘的多项式曲线拟合。
概念
最小二乘法多项式曲线拟合,根据给定的m个点,并不要求这条曲线精确地经过这些点,而是曲线y=f(x)的近似曲线y= φ(x)。
给定数据点pi(xi,yi),其中i=1,2,…,m。求近似曲线y= φ(x)。并且使得近似曲线与y=f(x)的偏差最小。近似曲线在点pi处的偏差δi= φ(xi)-y,i=1,2,...,m。
常见的曲线拟合方法:
1.使偏差绝对值之和最小

2.使偏差绝对值最大的最小

3.使偏差平方和最小

按偏差平方和最小的原则选取拟合曲线,并且采取二项式方程为拟合曲线的方法,称为最小二乘法。
推导过程:
1. 设拟合多项式为:

2.各点到这条曲线的距离之和,即偏差平方和如下:

3.为了求得符合条件的a值,对等式右边求ai偏导数,因而我们得到了:

.......

4.将等式左边进行一下化简,然后应该可以得到下面的等式:
.......
5.把这些等式表示成矩阵的形式,就可以得到下面的矩阵:
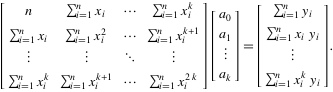
6.即X*A=Y。
我们只要解出这个线性方程,即可求得拟合曲线多项式的系数矩阵。而在OpenCV中,有一个专门用于求解线性方程的函数,即cv::solve(),具体调用形式如下:
- int cv::solve(
- cv::InputArray X, // 左边矩阵X, nxn
- cv::InputArray Y, // 右边矩阵Y,nx1
- cv::OutputArray A, // 结果,系数矩阵A,nx1
- int method = cv::DECOMP_LU // 估算方法
- );
我们只需要按照上述原理,构造出矩阵X和Y,即可调用该函数,计算出多项式的系数矩阵A。
opencv中支持的估算方法如下图所示:

实现如下:
- bool polynomial_curve_fit(std::vector<cv::Point>& key_point, int n, cv::Mat& A)
- {
- //Number of key points
- int N = key_point.size();
- //构造矩阵X
- cv::Mat X = cv::Mat::zeros(n + 1, n + 1, CV_64FC1);
- for (int i = 0; i < n + 1; i++)
- {
- for (int j = 0; j < n + 1; j++)
- {
- for (int k = 0; k < N; k++)
- {
- X.at<double>(i, j) = X.at<double>(i, j) +
- std::pow(key_point[k].x, i + j);
- }
- }
- }
- //构造矩阵Y
- cv::Mat Y = cv::Mat::zeros(n + 1, 1, CV_64FC1);
- for (int i = 0; i < n + 1; i++)
- {
- for (int k = 0; k < N; k++)
- {
- Y.at<double>(i, 0) = Y.at<double>(i, 0) +
- std::pow(key_point[k].x, i) * key_point[k].y;
- }
- }
- A = cv::Mat::zeros(n + 1, 1, CV_64FC1);
- //求解矩阵A
- cv::solve(X, Y, A, cv::DECOMP_LU);
- return true;
- }
测试代码如下:
- int main()
- {
- //创建用于绘制的深蓝色背景图像
- cv::Mat image = cv::Mat::zeros(480, 640, CV_8UC3);
- image.setTo(cv::Scalar(100, 0, 0));
- //输入拟合点
- std::vector<cv::Point> points;
- points.push_back(cv::Point(100., 58.));
- points.push_back(cv::Point(150., 70.));
- points.push_back(cv::Point(200., 90.));
- points.push_back(cv::Point(252., 140.));
- points.push_back(cv::Point(300., 220.));
- points.push_back(cv::Point(350., 400.));
- //将拟合点绘制到空白图上
- for (int i = 0; i < points.size(); i++)
- {
- cv::circle(image, points[i], 5, cv::Scalar(0, 0, 255), 2, 8, 0);
- }
- //绘制折线
- cv::polylines(image, points, false, cv::Scalar(0, 255, 0), 1, 8, 0);
- cv::Mat A;
- polynomial_curve_fit(points, 3, A);
- std::cout << "A = " << A << std::endl;
- std::vector<cv::Point> points_fitted;
- for (int x = 0; x < 400; x++)
- {
- double y = A.at<double>(0, 0) + A.at<double>(1, 0) * x +
- A.at<double>(2, 0)*std::pow(x, 2) + A.at<double>(3, 0)*std::pow(x, 3);
- points_fitted.push_back(cv::Point(x, y));
- }
- cv::polylines(image, points_fitted, false, cv::Scalar(0, 255, 255), 1, 8, 0);
- cv::imshow("image", image);
- cv::waitKey(0);
- return 0;
- }

2017.06.05
算法+OpenCV】基于opencv的直线和曲线拟合与绘制(最小二乘法)的更多相关文章
- Canny边缘检测算法(基于OpenCV的Java实现)
目录 Canny边缘检测算法(基于OpenCV的Java实现) 绪论 Canny边缘检测算法的发展历史 Canny边缘检测算法的处理流程 用高斯滤波器平滑图像 彩色RGB图像转换为灰度图像 一维,二维 ...
- 【AdaBoost算法】基于OpenCV实现人脸检测Demo
一.关于检测算法 分类器训练: 通过正样本与负样本训练可得到分类器,opencv有编译好的训练Demo,按要求训练即可生成,这里我们直接使用其已经训练好的分类器检测: 检测过程: 检测过程很简单,可以 ...
- 基于Opencv和Mfc的图像处理增强库GOCVHelper(索引)
GOCVHelper(GreenOpen Computer Version Helper )是我在这几年编写图像处理程序的过程中积累下来的函数库.主要是对Opencv的适当扩展和在实现Mfc程序时候的 ...
- opencv基于PCA降维算法的人脸识别
opencv基于PCA降维算法的人脸识别(att_faces) 一.数据提取与处理 # 导入所需模块 import matplotlib.pyplot as plt import numpy as n ...
- 基于OpenCV的KNN算法实现手写数字识别
基于OpenCV的KNN算法实现手写数字识别 一.数据预处理 # 导入所需模块 import cv2 import numpy as np import matplotlib.pyplot as pl ...
- 图像矫正-基于opencv实现
一.引言 上篇文章中四种方法对图像进行倾角矫正都非常有效.Hough变换和Radon相似,其抗干扰能力比较强,但是运算量大,程序执行慢,其改进方法为:我们可以不对整幅图像进行操作,可以在图像中选取一块 ...
- 对倾斜的图像进行修正——基于opencv 透视变换
这篇文章主要解决这样一个问题: 有一张倾斜了的图片(当然是在Z轴上也有倾斜,不然直接旋转得了o(╯□╰)o),如何尽量将它纠正到端正的状态. 而要解决这样一个问题,可以用到透视变换. 关于透视变换的原 ...
- [转载]卡尔曼滤波器及其基于opencv的实现
卡尔曼滤波器及其基于opencv的实现 源地址:http://hi.baidu.com/superkiki1989/item/029f65013a128cd91ff0461b 这个是维基百科中的链接, ...
- OpenCV2学习笔记(十四):基于OpenCV卡通图片处理
得知OpenCV有一段时间.除了研究的各种算法的内容.除了从备用,据导游书籍和资料,尝试结合链接的图像处理算法和日常生活,第一桌面上(随着摄像头)完成了一系列的视频流处理功能.开发平台Qt5.3.2+ ...
随机推荐
- JSP内置对象——request 及其响应get和post请求的实例
request对象客户端的请求信息被封装在request对象中,通过它才能了解到客户的需求,然后做出响应.它是HttpServletRequest类的实例.request对象具有请求域,即完成客户端的 ...
- nvm-windows 安装后,node 命令报错
下载地址: https://github.com/coreybutler/nvm-windows/releases 我是点下面这个直接安装的: 配置文件,我都是习惯在软件目录下建个 files 文件夹 ...
- 160329(二)、web.xml配置详解
1.启动一个WEB项目的时候,WEB容器会去读取它的配置文件web.xml,读取<listener>和<context-param>两个结点. 2.紧急着,容创建一个Servl ...
- 各大网站CSS初始化代码集合
css代码之所以初始化,是因为能尽量减少 各浏览器之间的兼容性问题! 腾讯QQ官网 样式初始化 body,ol,ul,h1,h2,h3,h4,h5,h6,p,th,td,dl,dd,form,fiel ...
- Tips-Windows 10【多桌面视窗】操作
Windows 10[多桌面视窗] 当你点击任务栏上的“task view”按键时,会在屏幕中间显示你当前正在使用的桌面,你可以点击“添加桌面”来创建一个新的桌面,在这个新的桌面你可以打开其他的应用程 ...
- C# 控件,MenuStrip,statusStrip,contextMenuStrip,ImageList, Listview,MonthCalendar、DataGridView,combobox,textbox,DateTimePicker,treeview,picturebox、toolStrip,radioButton,TableLayoutPanel
一.菜单栏 1)MenuStrip 菜单栏 选择工具栏控件:menuStrip C# Menustrip控件的常用属性用法详解 C#WinForm应用程序——添加菜单栏MenuStrip] 1.通过右 ...
- Linux下 解包/打包 Android 映像文件 system.img, boot.img, ramdisk.img, userdata.img.
Linux下 解包/打包 Android 映像文件 system.img, boot.img, ramdisk.img, userdata.img. 2014年10月20日 ⁄ 计算机视觉 ⁄ 共 1 ...
- PMP私有广告交易市场
[资源]互联网广告新知:半小时读懂PMP私有广告交易市场是什么? https://socialbeta.com/t/resource-what-is-pmp.html SocialBeta | 201 ...
- If a cache file exists, it is sent directly to the browser, bypassing the normal system execution.
w开启缓存,缓存视图,用于后续请求. https://www.codeigniter.com/userguide3/overview/appflow.html http://codeigniter.o ...
- Solidworks to Urdf to Sdf
. The urdf using tree form that does not support parallel robots (close loop robots). . The sdf usin ...